
一种关节牵拉式仿人形机器人手.pdf

是雁****找我


1/6

2/6

3/6

4/6

5/6

6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种关节牵拉式仿人形机器人手.pdf
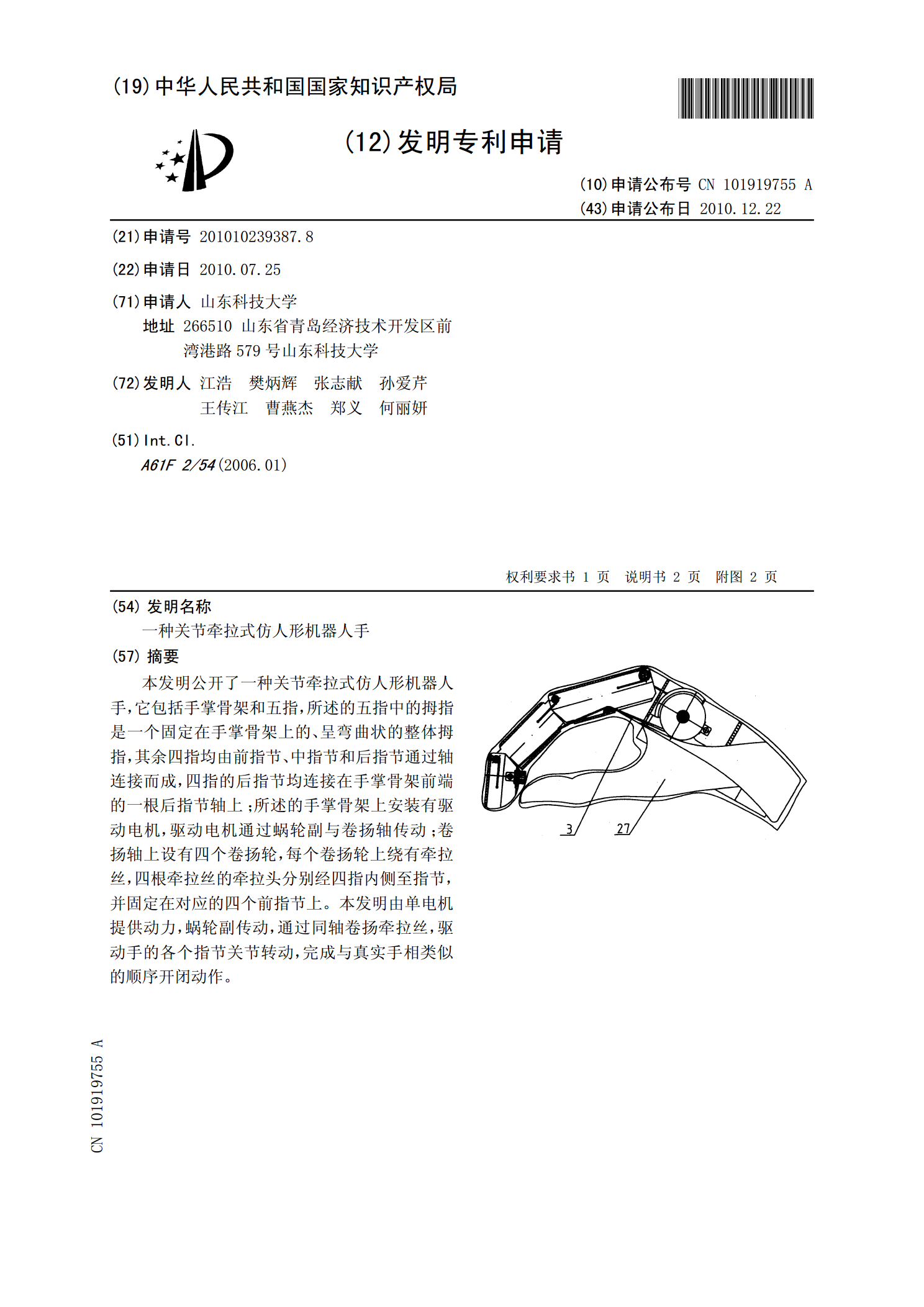
本发明公开了一种关节牵拉式仿人形机器人手,它包括手掌骨架和五指,所述的五指中的拇指是一个固定在手掌骨架上的、呈弯曲状的整体拇指,其余四指均由前指节、中指节和后指节通过轴连接而成,四指的后指节均连接在手掌骨架前端的一根后指节轴上;所述的手掌骨架上安装有驱动电机,驱动电机通过蜗轮副与卷扬轴传动;卷扬轴上设有四个卷扬轮,每个卷扬轮上绕有牵拉丝,四根牵拉丝的牵拉头分别经四指内侧至指节,并固定在对应的四个前指节上。本发明由单电机提供动力,蜗轮副传动,通过同轴卷扬牵拉丝,驱动手的各个指节关节转动,完成与真实手相类似的

基于视觉定位的多关节串联人形机器人手臂系统的研究与实现.docx
基于视觉定位的多关节串联人形机器人手臂系统的研究与实现基于视觉定位的多关节串联人形机器人手臂系统的研究与实现摘要:人形机器人手臂系统在现代工业和服务领域中具有广泛的应用前景。本文以视觉定位为基础,针对多关节串联人形机器人手臂系统的研究和实现进行了探讨。首先介绍了人形机器人手臂系统的背景和研究意义,然后详细分析了多关节串联结构的优势和挑战,并提出了一种基于视觉定位的控制算法。最后通过实验验证了该算法的有效性和可行性。本研究为多关节串联人形机器人手臂系统的控制和应用提供了重要参考。关键词:人形机器人手臂、多关

仿人形机器人.docx
题目:仿人形机器人摘要(中英文)伴随着嵌入式系统的应用领域不断发展,嵌入式智能机器人系统也逐渐成为了智能机器人领域研究的一个热点。本项目使用TI公司基于ARM的lm3s1138单片机制作的仿人形机器人。机器人可以进行简单的仿人移动,同时又有视觉识别系统可对障碍进行识别最后对运动控制演示程序进行了编译。Astheunceasinglydevelopingoftheembeddedsystem,theembeddedintelligentrobotsystemhasbecomingahotspotindoma

仿人形机器人.docx
题目:仿人形机器人摘要(中英文)伴随着嵌入式系统的应用领域不断发展,嵌入式智能机器人系统也逐渐成为了智能机器人领域研究的一个热点。本项目使用TI公司基于ARM的lm3s1138单片机制作的仿人形机器人。机器人可以进行简单的仿人移动,同时又有视觉识别系统可对障碍进行识别最后对运动控制演示程序进行了编译。Astheunceasinglydevelopingoftheembeddedsystem,theembeddedintelligentrobotsystemhasbecomingahotspotindoma

一种机器人手腕关节.pdf
本发明公开了一种机器人手腕关节,包括第一关节动力轴,所述第一关节动力轴与第二关节动力轴分别通过锥齿轮与第一传动轴、第二转动轴连接,所述第一传动轴通过链条或皮带与第二关节从动轴连接,所述第二转动轴通过链条或皮带与第二从动轮连接,所述第二从动轮安装在减速器的输入端上,所述减速器的输出端与第二关节摆臂连接,所述第二关节从动轴通过锥齿轮与设于第二关节摆臂内部的第三关节动力轴连接,所述第二关节摆臂末端侧壁形成有圆筒形的壳体,所述壳体内设有可转动的内筒,所述第三关节动力轴转动能够将动力传输至内筒,使得内筒转动,本发明