
仿人形机器人.docx

快乐****蜜蜂


1/7

2/7

3/7

4/7

5/7

6/7

7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

仿人形机器人.docx
题目:仿人形机器人摘要(中英文)伴随着嵌入式系统的应用领域不断发展,嵌入式智能机器人系统也逐渐成为了智能机器人领域研究的一个热点。本项目使用TI公司基于ARM的lm3s1138单片机制作的仿人形机器人。机器人可以进行简单的仿人移动,同时又有视觉识别系统可对障碍进行识别最后对运动控制演示程序进行了编译。Astheunceasinglydevelopingoftheembeddedsystem,theembeddedintelligentrobotsystemhasbecomingahotspotindoma

仿人形机器人.docx
题目:仿人形机器人摘要(中英文)伴随着嵌入式系统的应用领域不断发展,嵌入式智能机器人系统也逐渐成为了智能机器人领域研究的一个热点。本项目使用TI公司基于ARM的lm3s1138单片机制作的仿人形机器人。机器人可以进行简单的仿人移动,同时又有视觉识别系统可对障碍进行识别最后对运动控制演示程序进行了编译。Astheunceasinglydevelopingoftheembeddedsystem,theembeddedintelligentrobotsystemhasbecomingahotspotindoma
一种关节牵拉式仿人形机器人手.pdf
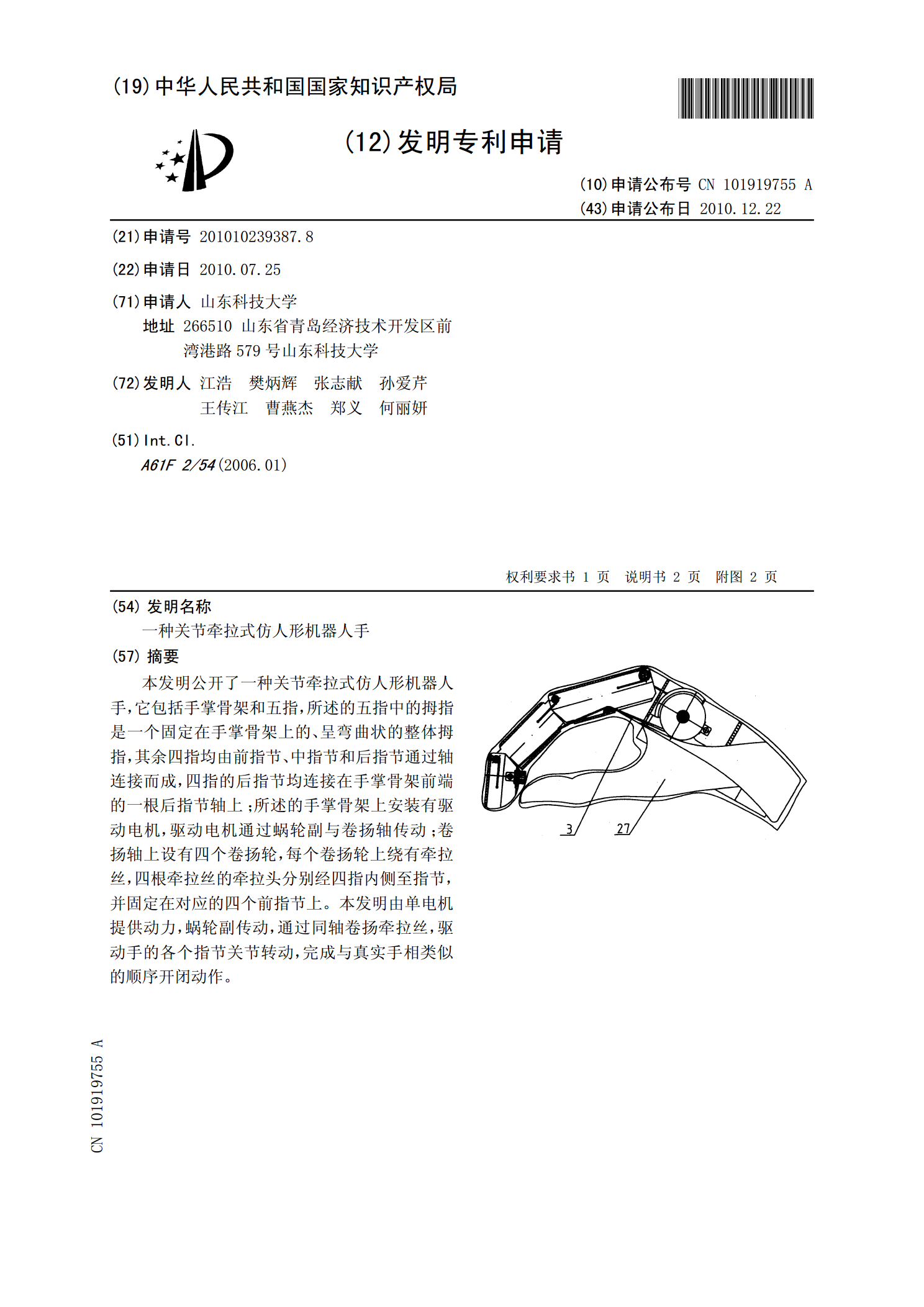
本发明公开了一种关节牵拉式仿人形机器人手,它包括手掌骨架和五指,所述的五指中的拇指是一个固定在手掌骨架上的、呈弯曲状的整体拇指,其余四指均由前指节、中指节和后指节通过轴连接而成,四指的后指节均连接在手掌骨架前端的一根后指节轴上;所述的手掌骨架上安装有驱动电机,驱动电机通过蜗轮副与卷扬轴传动;卷扬轴上设有四个卷扬轮,每个卷扬轮上绕有牵拉丝,四根牵拉丝的牵拉头分别经四指内侧至指节,并固定在对应的四个前指节上。本发明由单电机提供动力,蜗轮副传动,通过同轴卷扬牵拉丝,驱动手的各个指节关节转动,完成与真实手相类似的

一种仿人形无轨自动送餐机器人.pdf
本发明公开了一种仿人形无轨自动送餐机器人,动力底座包括三层支撑板、二层支撑板和底盘,所述底盘上设有伺服电机,伺服电机的一侧设有驱动轮,二层支撑板上设有伺服驱动器,所述底盘内设有避障传感器,所述动力底座上还设有保险和主控制板,保险连接继电器,继电器进一步和空气开关连接,所述机器人外壳主体两侧设有手臂,托盘设置于手臂上,所述机器人外壳主体背部设有电源开关、急停开关、光电传感器和触摸屏,机器人外壳主体上部设有传感器,提供一种仿人形无轨自动送餐机器人,地板上无需粘贴磁条或光感胶条,也能达到机器人正常行走的功能,不

一种仿人形无轨自动送餐机器人.pdf
本发明公开了一种仿人形无轨自动送餐机器人,其结构包括:智能感应装置、机器人头部、电子眼、发声装置、机器人手臂、托盘、机器人身体、移动装置,智能感应装置设有两个并且分别安装固定在机器人头部左右两侧,机器人头部水平安装在机器人身体顶部中间部分上,电子眼底部信号端电连接于机器人头部内部电气系统上,发声装置与机器人头部为一体化机构部件,托盘水平焊接在机器人手臂上,机器人手臂设有两个并且分别机械连接在机器人身体左右两侧,机器人身体竖向嵌套安装在移动装置内部,本发明通过改进后,送餐机器人可以在餐桌钱进行360度无死角