
泊车辅助装置.pdf

一吃****永贺


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
泊车辅助方法和泊车辅助装置.pdf
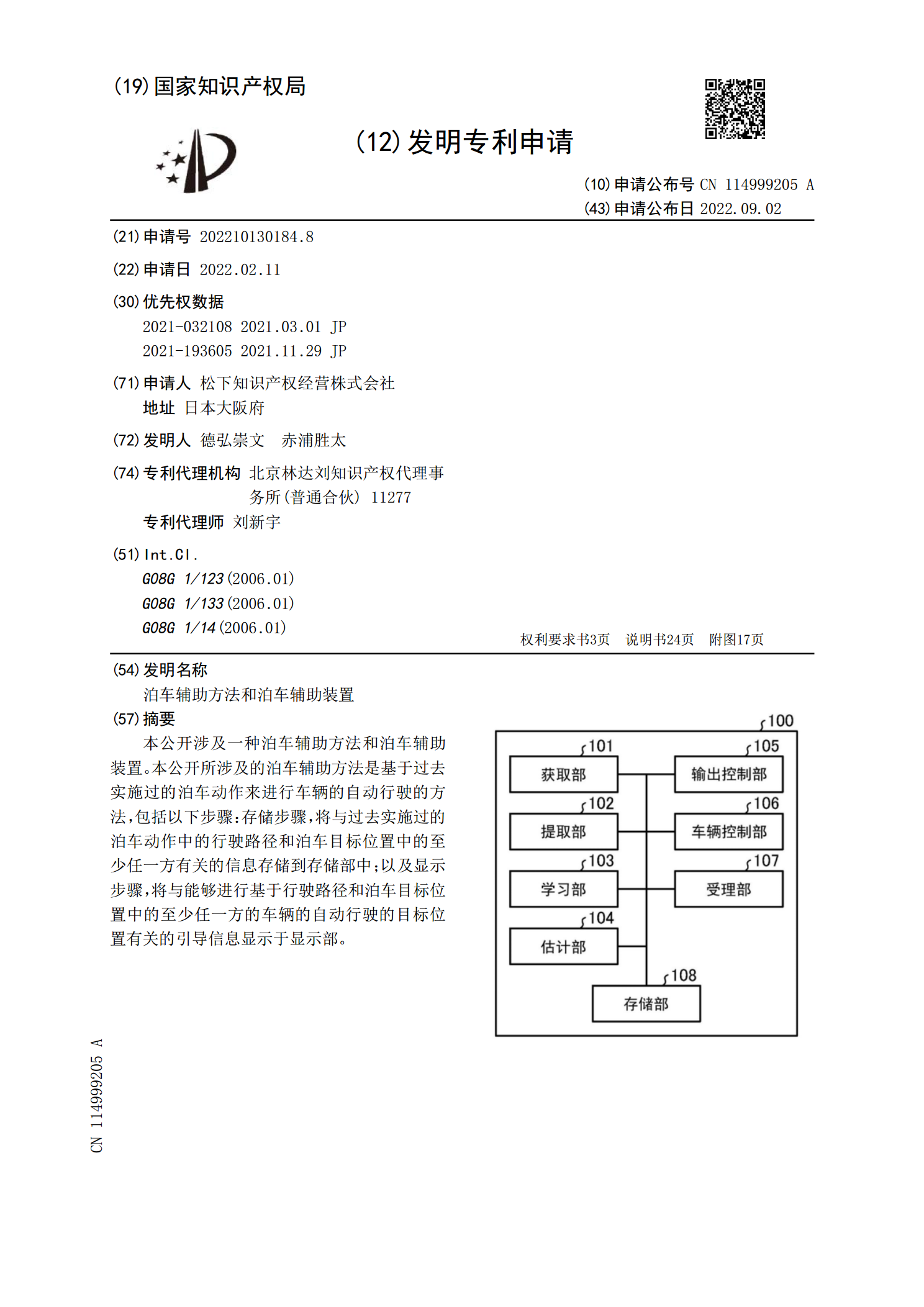
本公开涉及一种泊车辅助方法和泊车辅助装置。本公开所涉及的泊车辅助方法是基于过去实施过的泊车动作来进行车辆的自动行驶的方法,包括以下步骤:存储步骤,将与过去实施过的泊车动作中的行驶路径和泊车目标位置中的至少任一方有关的信息存储到存储部中;以及显示步骤,将与能够进行基于行驶路径和泊车目标位置中的至少任一方的车辆的自动行驶的目标位置有关的引导信息显示于显示部。

泊车辅助装置.pdf
本发明涉及一种泊车辅助装置(10),其被适用于具有前后轮可独立转向的四轮转向模式的车辆中,其特征在于,具有:路径计算单元,其计算向目标位置引导车辆所需的该车辆的路径;辅助单元,其根据由所述路径计算单元计算出的路径,辅助车辆向所述目标位置进行泊车移动,由所述路径计算单元计算出的路径包括,预定由前后轮以前后反相的方式转向时的路径,而该路径包括由定点画出回旋曲线的轨迹的区间,其中,所述定点为,位于车辆的前后方向的中心线上的定点,且为自旋转中心出发的垂直线与所述中心线相交的交点。
辅助泊车装置.pdf
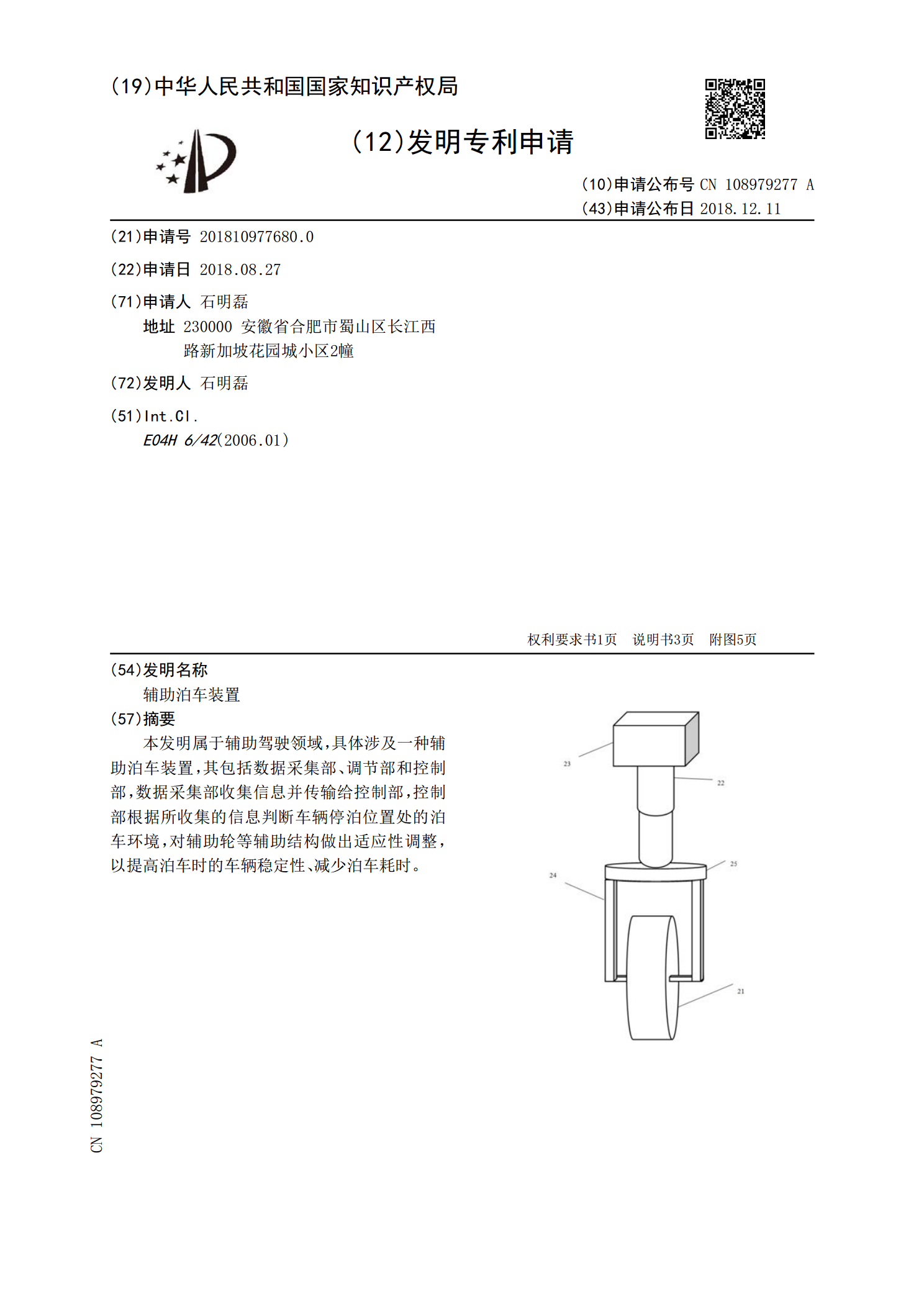
本发明属于辅助驾驶领域,具体涉及一种辅助泊车装置,其包括数据采集部、调节部和控制部,数据采集部收集信息并传输给控制部,控制部根据所收集的信息判断车辆停泊位置处的泊车环境,对辅助轮等辅助结构做出适应性调整,以提高泊车时的车辆稳定性、减少泊车耗时。
泊车辅助装置的检修.ppt
交通工程系李智项目四一、倒车辅助系统的组成倒车雷达模块;倒车雷达报警显示器;倒车雷达传感器;变速器控制模块;发动机控制模块;车身控制模块。说起倒车雷达,大家一定记得多年前随处可以听到那清脆的女声:“请注意!倒车!”,这可以算作倒车雷达的鼻祖了,这种话筒式的提示音对驾驶员的操作不会起到任何帮助,只能对行人起些警示作用。虽然每辆车都有后视镜,但不可避免地都存在一个后视盲区。为弥补这一缺陷,加装倒车雷达成了许多新车主的选择。倒车雷达的提示方式可分为:液晶、语言和声音三种;接收方式分为:无线传输和有线传输两种。3
一种辅助泊车装置、系统及辅助泊车方法.pdf
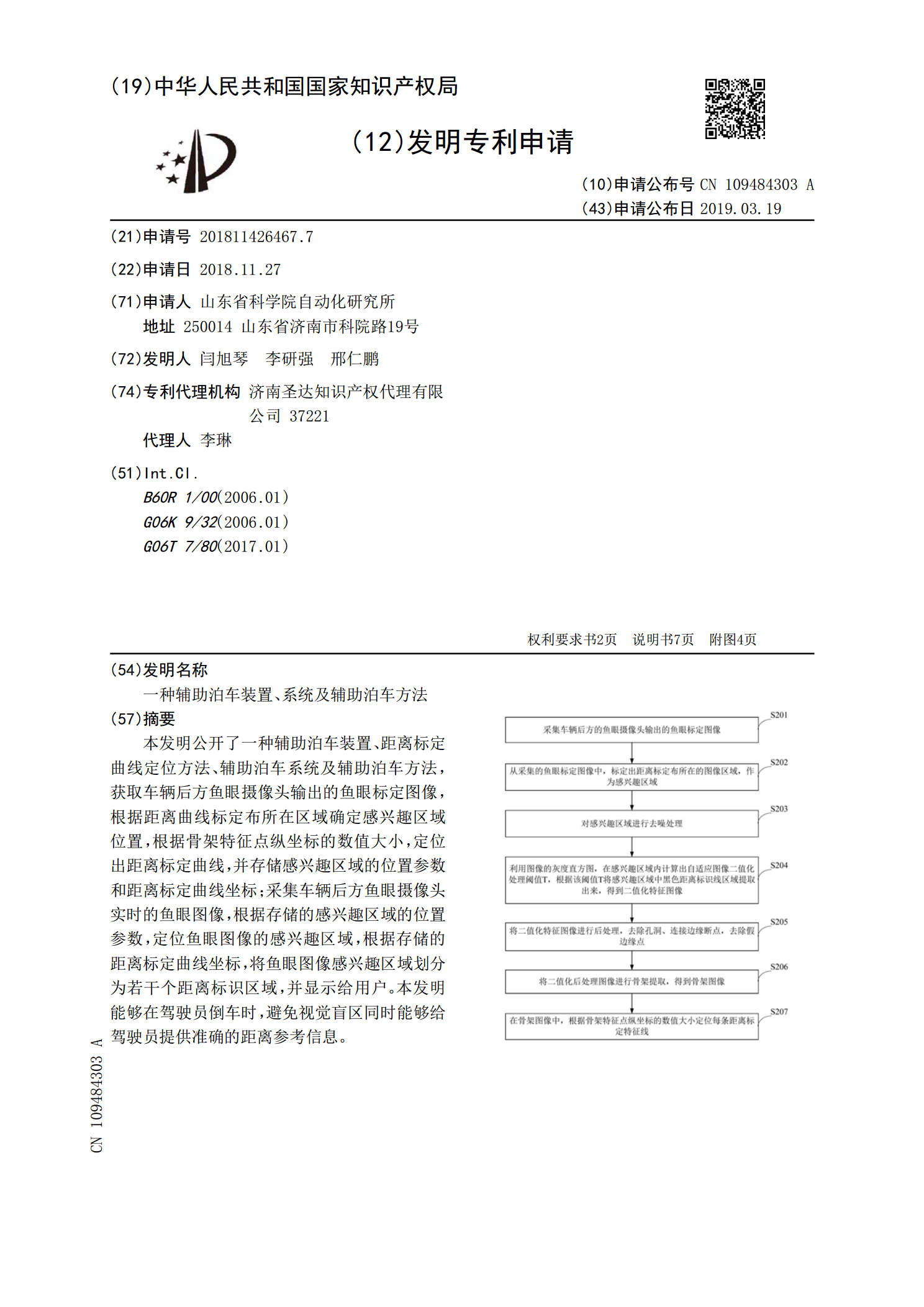
本发明公开了一种辅助泊车装置、距离标定曲线定位方法、辅助泊车系统及辅助泊车方法,获取车辆后方鱼眼摄像头输出的鱼眼标定图像,根据距离曲线标定布所在区域确定感兴趣区域位置,根据骨架特征点纵坐标的数值大小,定位出距离标定曲线,并存储感兴趣区域的位置参数和距离标定曲线坐标;采集车辆后方鱼眼摄像头实时的鱼眼图像,根据存储的感兴趣区域的位置参数,定位鱼眼图像的感兴趣区域,根据存储的距离标定曲线坐标,将鱼眼图像感兴趣区域划分为若干个距离标识区域,并显示给用户。本发明能够在驾驶员倒车时,避免视觉盲区同时能够给驾驶员提供准