
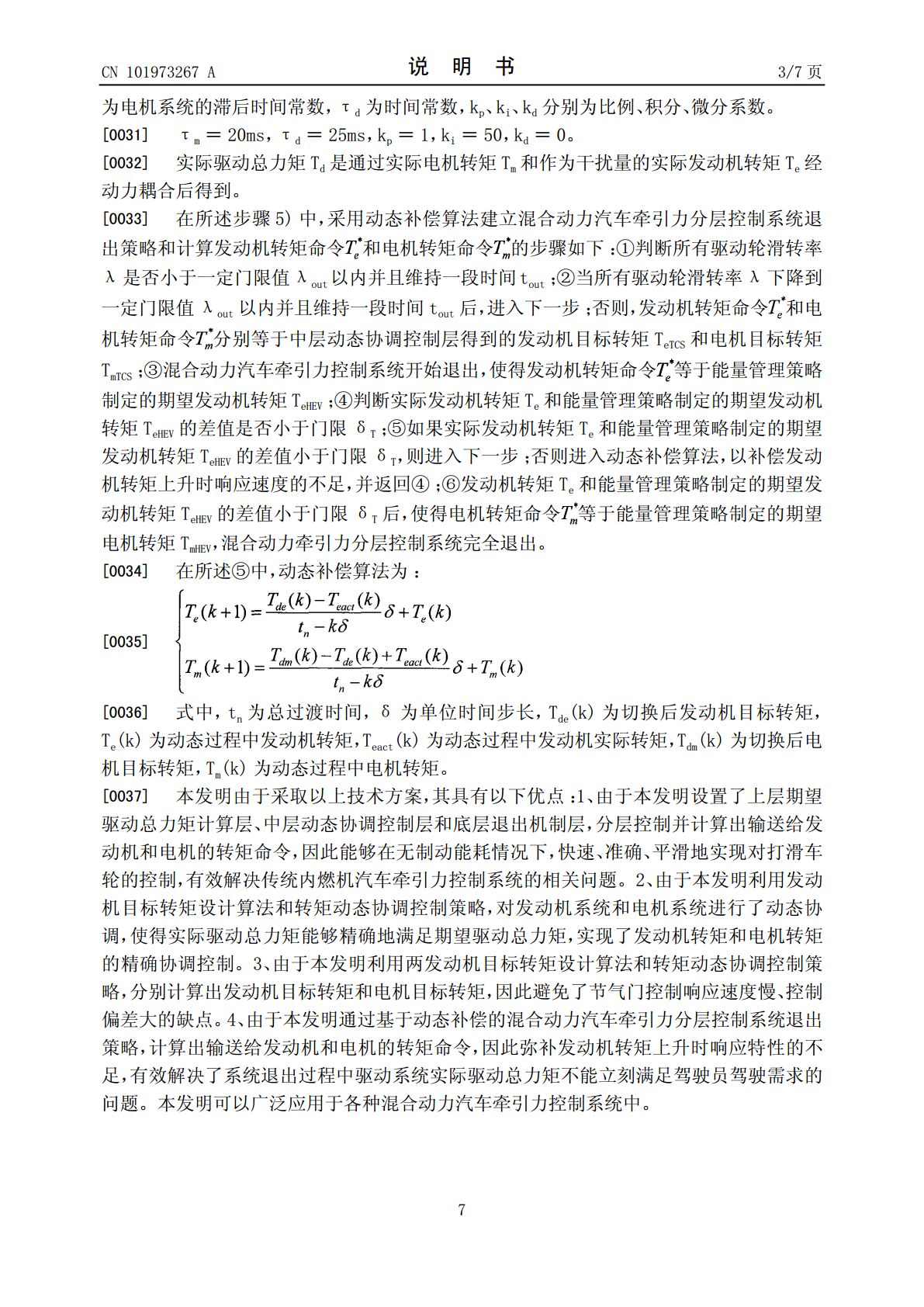
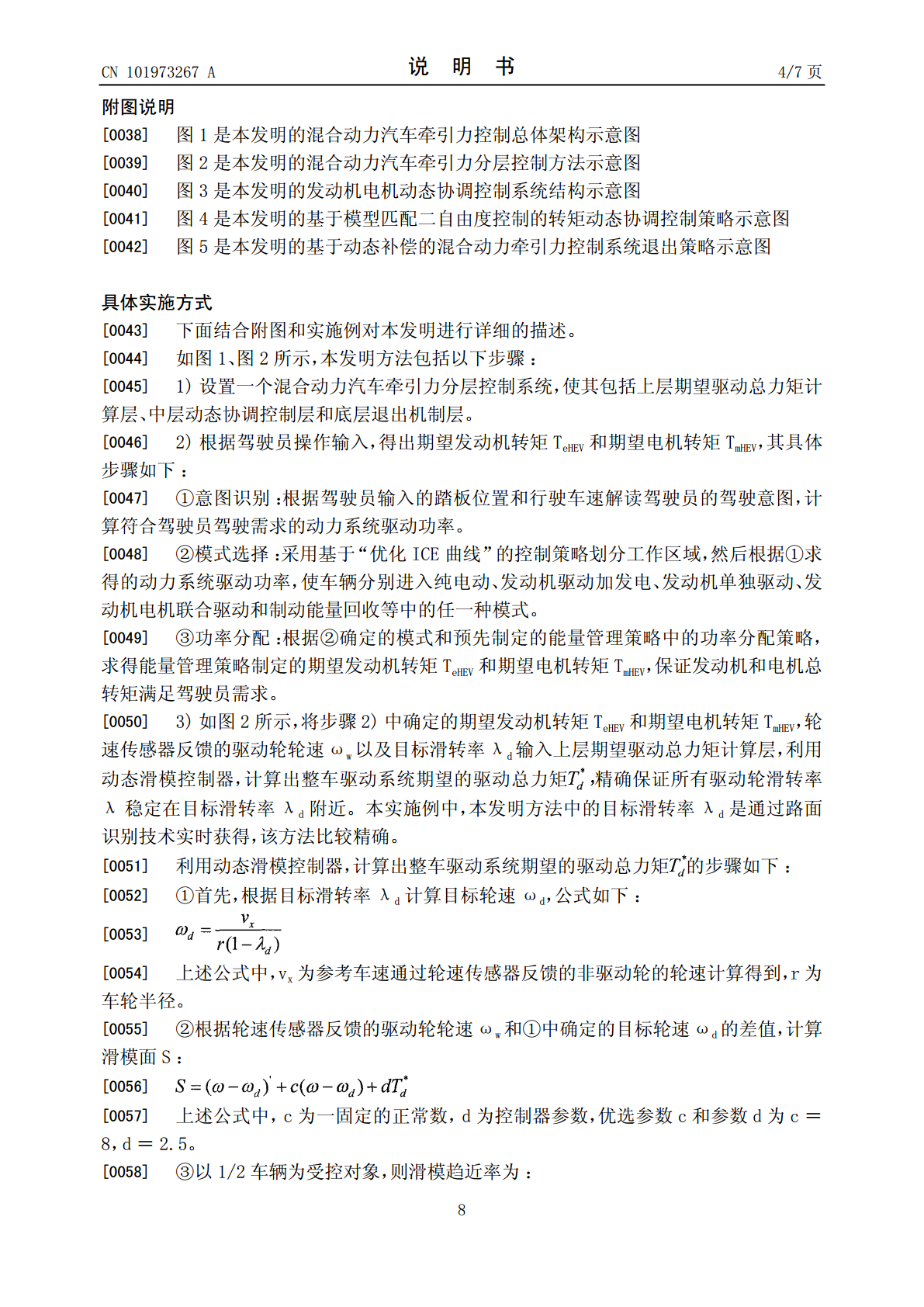
混合动力电动汽车牵引力分层控制方法.pdf

俊凤****bb

1/10
2/10

3/10
4/10
5/10

6/10
7/10
8/10

9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

混合动力电动汽车牵引力分层控制方法.pdf
本发明涉及一种混合动力电动汽车牵引力分层控制方法,包括以下步骤:1)设置上层期望驱动总力矩计算层、中层动态协调控制层和底层退出机制层;2)根据驾驶员操作输入,得出期望发动机转矩和期望电机转矩;3)将期望发动机转矩和期望电机转矩,驱动轮轮速以及目标滑转率,输入上层期望驱动总力矩计算层,计算整车驱动系统期望的驱动总力矩;4)将实际驱动总力矩、整车驱动系统期望驱动总力矩和期望发动机转矩,输入中层动态协调控制层,计算出发动机和电机目标转矩;5)将发动机和电机目标转矩,期望发动机和电机转矩以及所有驱动轮滑转率,输入

混合动力电动汽车的控制方法.pdf
一种混合动力电动汽车的控制方法,该混合动力电动汽车包括内燃机、牵引用电池和混合动力电动动力系,该混合动力电动动力系包括通过牵引用电池提供功率的电动机和结合到内燃机和牵引用电池的发电机。所述控制方法包括:基于期望的车轮扭矩和牵引用电池充电功率极限和放电功率极限确定最小发动机功率极限和最大发动机功率极限。计算发电机扭矩命令以使发动机速度达到期望的发动机速度。基于最小发动机功率极限和最大发动机功率极限限制发电机扭矩命令,以限制传递到动力系的发动机功率。
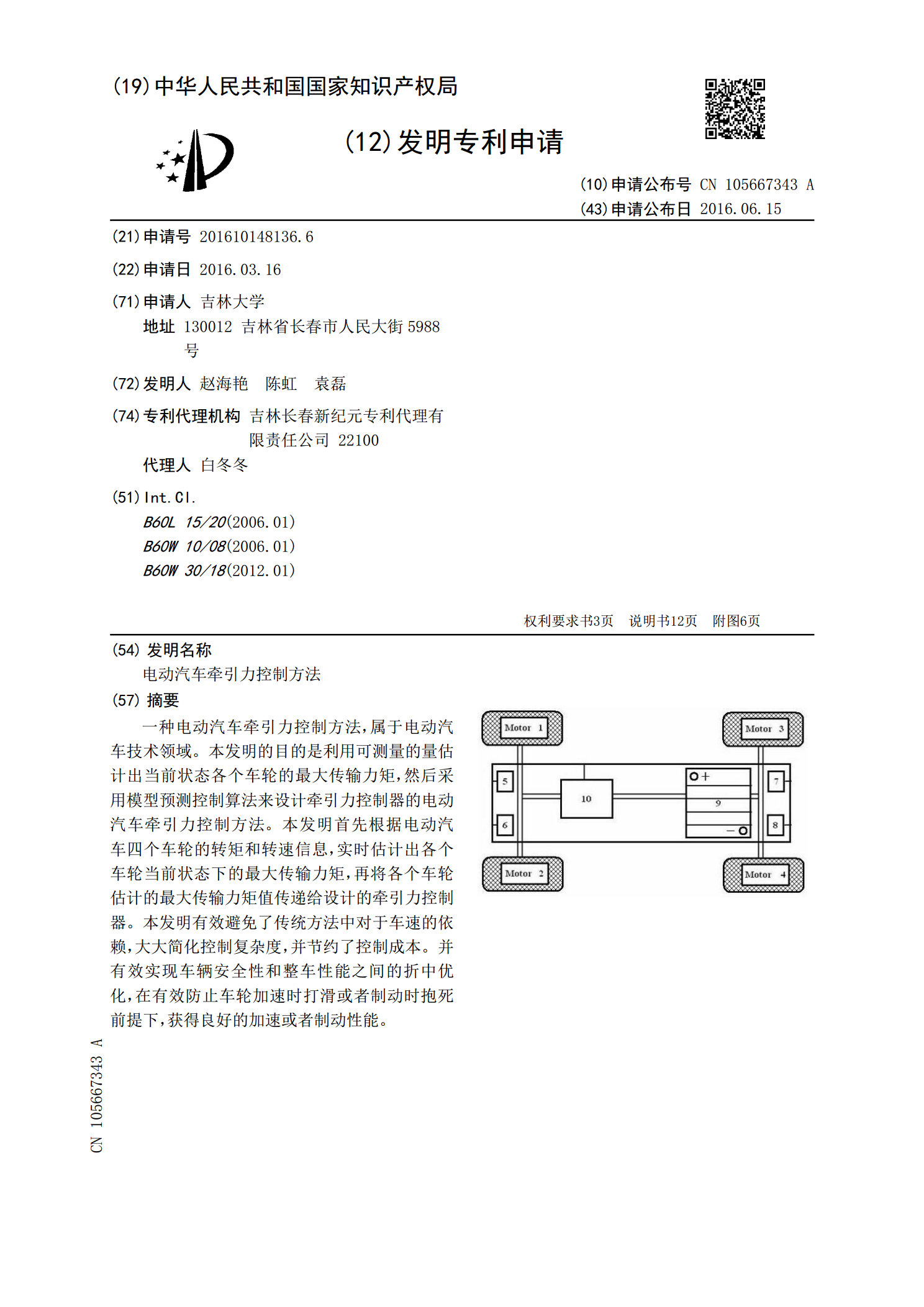
电动汽车牵引力控制方法.pdf
一种电动汽车牵引力控制方法,属于电动汽车技术领域。本发明的目的是利用可测量的量估计出当前状态各个车轮的最大传输力矩,然后采用模型预测控制算法来设计牵引力控制器的电动汽车牵引力控制方法。本发明首先根据电动汽车四个车轮的转矩和转速信息,实时估计出各个车轮当前状态下的最大传输力矩,再将各个车轮估计的最大传输力矩值传递给设计的牵引力控制器。本发明有效避免了传统方法中对于车速的依赖,大大简化控制复杂度,并节约了控制成本。并有效实现车辆安全性和整车性能之间的折中优化,在有效防止车轮加速时打滑或者制动时抱死前提下,获得
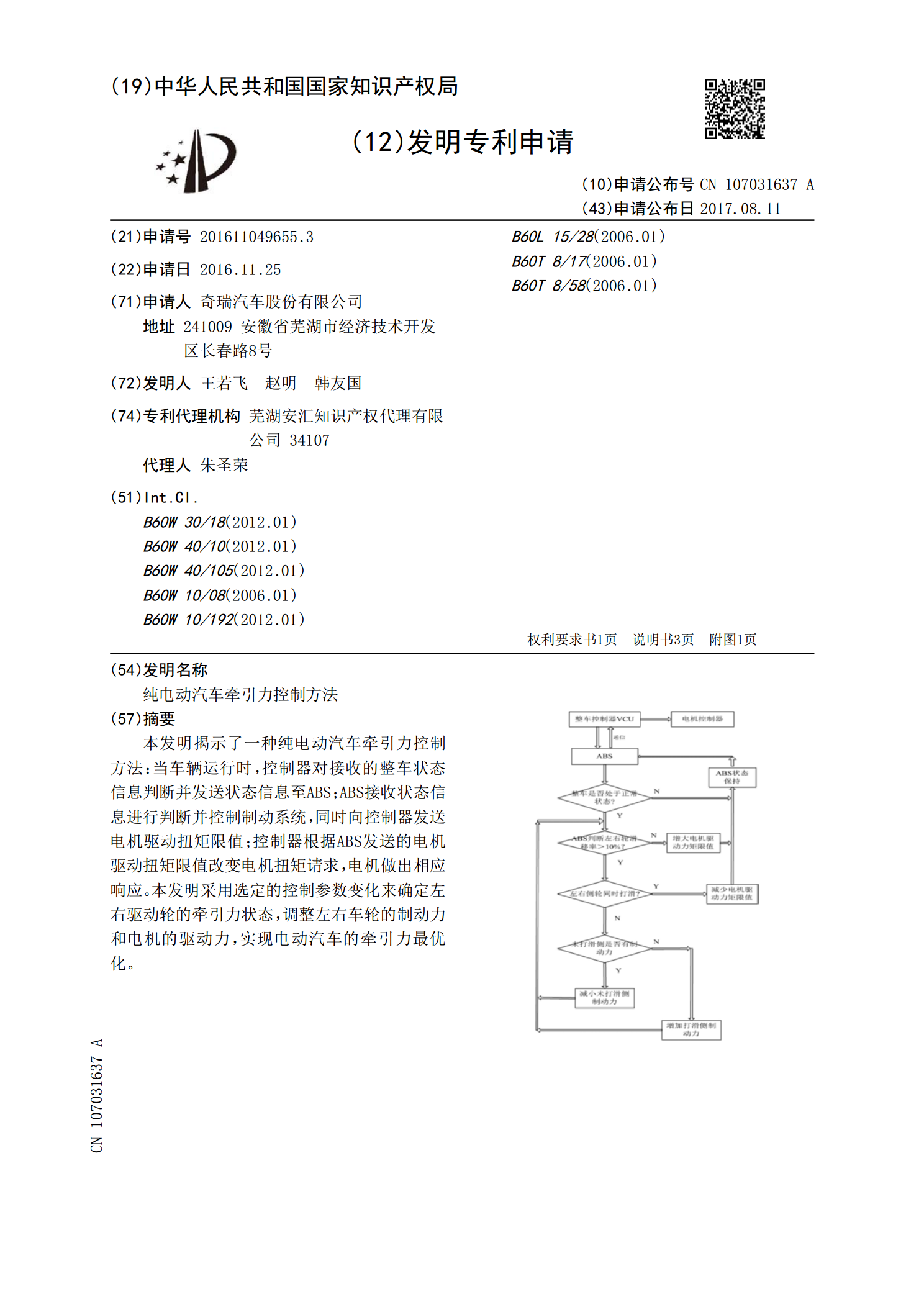
纯电动汽车牵引力控制方法.pdf
本发明揭示了一种纯电动汽车牵引力控制方法:当车辆运行时,控制器对接收的整车状态信息判断并发送状态信息至ABS;ABS接收状态信息进行判断并控制制动系统,同时向控制器发送电机驱动扭矩限值;控制器根据ABS发送的电机驱动扭矩限值改变电机扭矩请求,电机做出相应响应。本发明采用选定的控制参数变化来确定左右驱动轮的牵引力状态,调整左右车轮的制动力和电机的驱动力,实现电动汽车的牵引力最优化。
电动汽车牵引力控制方法和装置.pdf
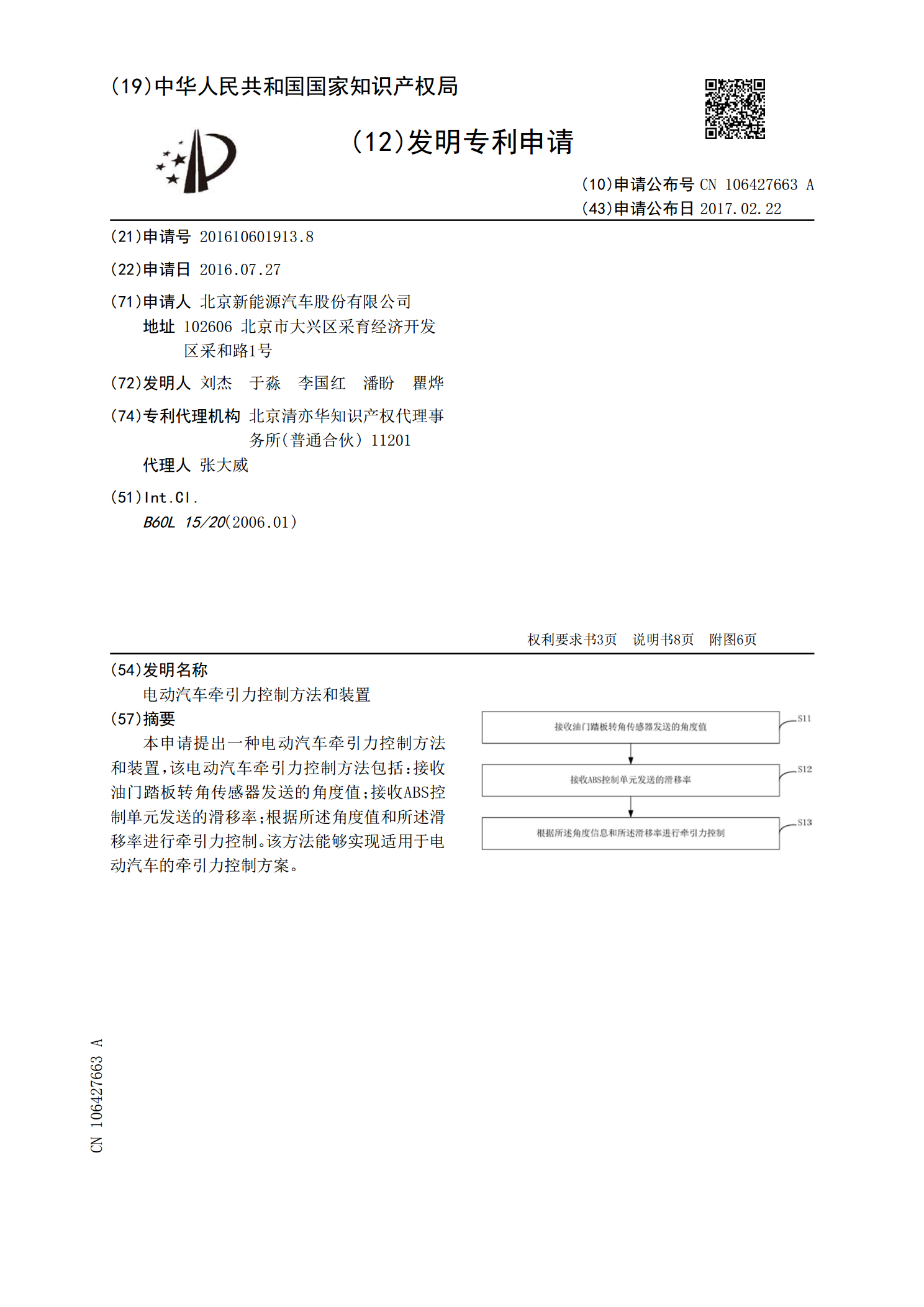
本申请提出一种电动汽车牵引力控制方法和装置,该电动汽车牵引力控制方法包括:接收油门踏板转角传感器发送的角度值;接收ABS控制单元发送的滑移率;根据所述角度值和所述滑移率进行牵引力控制。该方法能够实现适用于电动汽车的牵引力控制方案。