
用变增益零相位误差跟踪和扰动观测实现轮廓加工的方法.pdf

书生****写意


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共36页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
用变增益零相位误差跟踪和扰动观测实现轮廓加工的方法.pdf
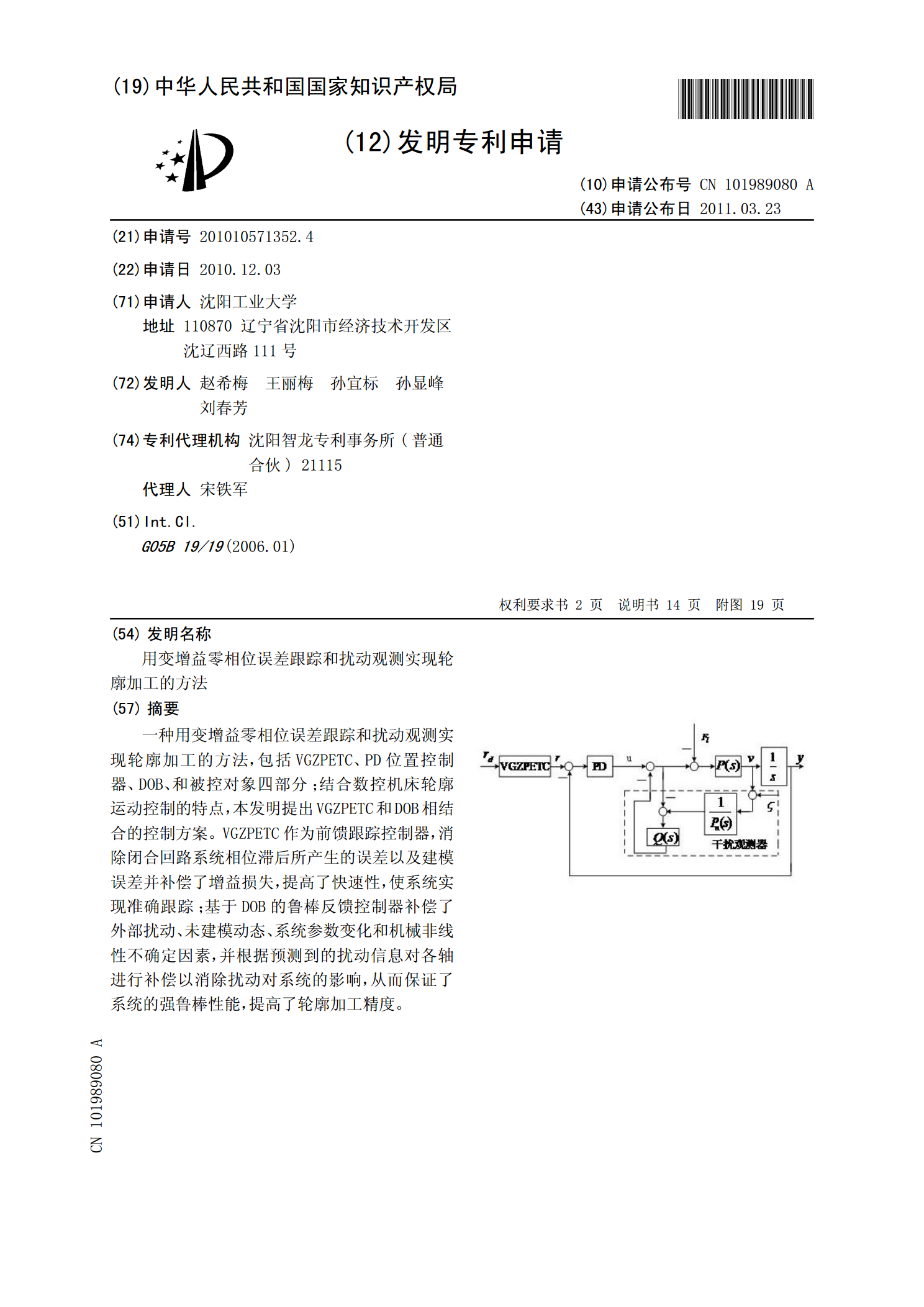
一种用变增益零相位误差跟踪和扰动观测实现轮廓加工的方法,包括VGZPETC、PD位置控制器、DOB、和被控对象四部分;结合数控机床轮廓运动控制的特点,本发明提出VGZPETC和DOB相结合的控制方案。VGZPETC作为前馈跟踪控制器,消除闭合回路系统相位滞后所产生的误差以及建模误差并补偿了增益损失,提高了快速性,使系统实现准确跟踪;基于DOB的鲁棒反馈控制器补偿了外部扰动、未建模动态、系统参数变化和机械非线性不确定因素,并根据预测到的扰动信息对各轴进行补偿以消除扰动对系统的影响,从而保证了系统的强鲁棒性能

减小轮廓加工误差的方法和系统.pdf
本发明涉及一种减小轮廓加工误差的方法和系统。所述方法包括以下步骤:获取震荡周期,并根据所述震荡周期计算延迟时间值;预估系统特性,计算系统特性参数,并根据系统特性参数计算分配系数;根据计算得到的分配系数值和延迟时间值对每个伺服周期中的原始插补位置进行卷积,将每个伺服周期分解成在所述延迟时间输出的数个部分。上述减小轮廓加工误差的方法和系统,通过在伺服周期中将原始插补位置分解为多个部分在不同延迟时间输出,从而对原始规划路径进行了处理,改善系统响应,减小了轨迹的轮廓误差,提高了加工精度。
五轴机床加工零件轮廓误差预测方法.docx
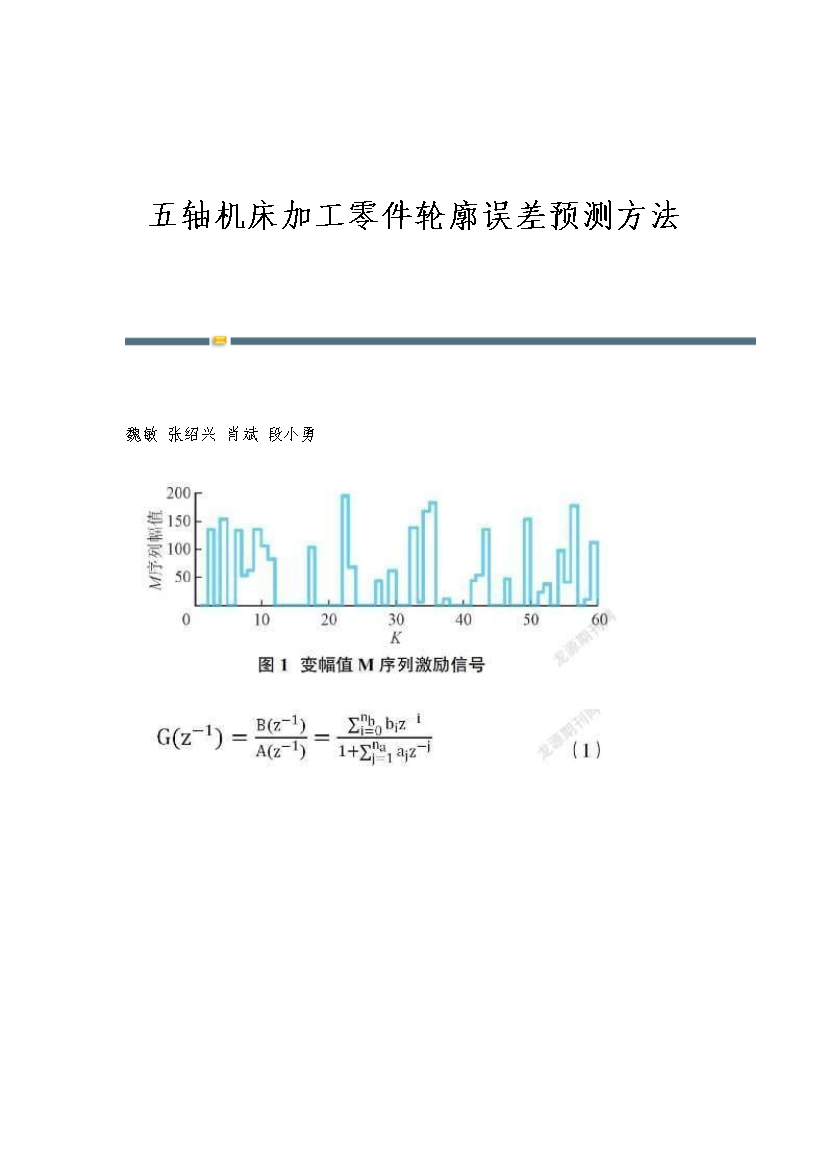
五轴机床加工零件轮廓误差预测方法魏敏张绍兴肖斌段小勇摘要:我国经济发展离不开工业进步,而作为工业生产重要工具,五轴机床生产加工的零件轮廓如果产生较大误差,将会直接影响后续产品质量。所以,需要对五轴机床加工零件轮廓误差预测方法探讨,从而摸索降低轮廓误差有效方案。利用侦测意特利五轴联动数控机床的进给轴与待加工零件相关信息,构建误差预测方案,可以实现对生产零件外部轮廓预测误差,对于提升零部件生产质量具有重要意义。Abstract:China'seconomicdevelopmentiscloselygeared
基于干扰观测滑模变结构的轮廓误差交叉耦合控制方法.pdf
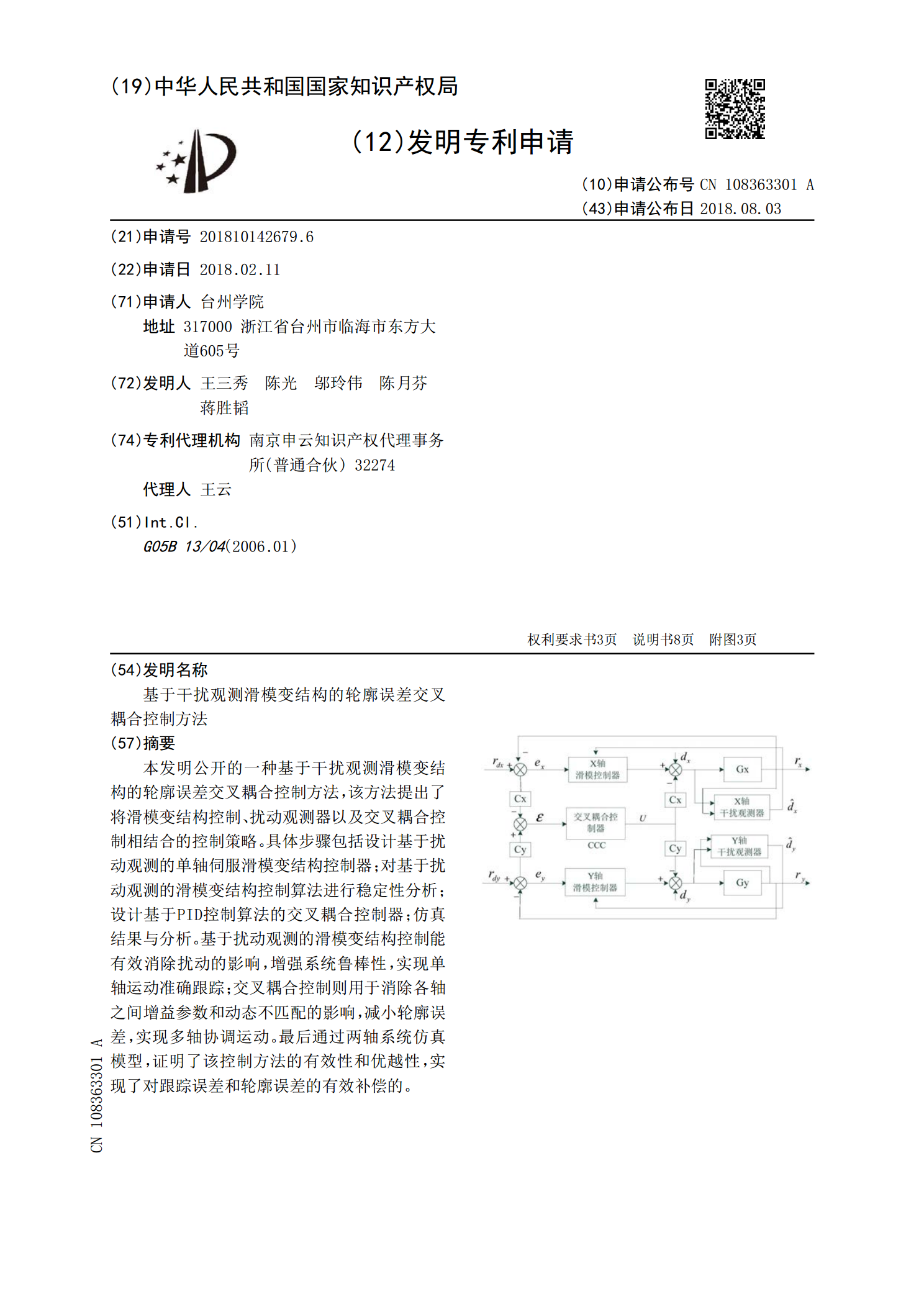
本发明公开的一种基于干扰观测滑模变结构的轮廓误差交叉耦合控制方法,该方法提出了将滑模变结构控制、扰动观测器以及交叉耦合控制相结合的控制策略。具体步骤包括设计基于扰动观测的单轴伺服滑模变结构控制器;对基于扰动观测的滑模变结构控制算法进行稳定性分析;设计基于PID控制算法的交叉耦合控制器;仿真结果与分析。基于扰动观测的滑模变结构控制能有效消除扰动的影响,增强系统鲁棒性,实现单轴运动准确跟踪;交叉耦合控制则用于消除各轴之间增益参数和动态不匹配的影响,减小轮廓误差,实现多轴协调运动。最后通过两轴系统仿真模型,证明
一种自适应变增益轮廓误差补偿方法.pdf
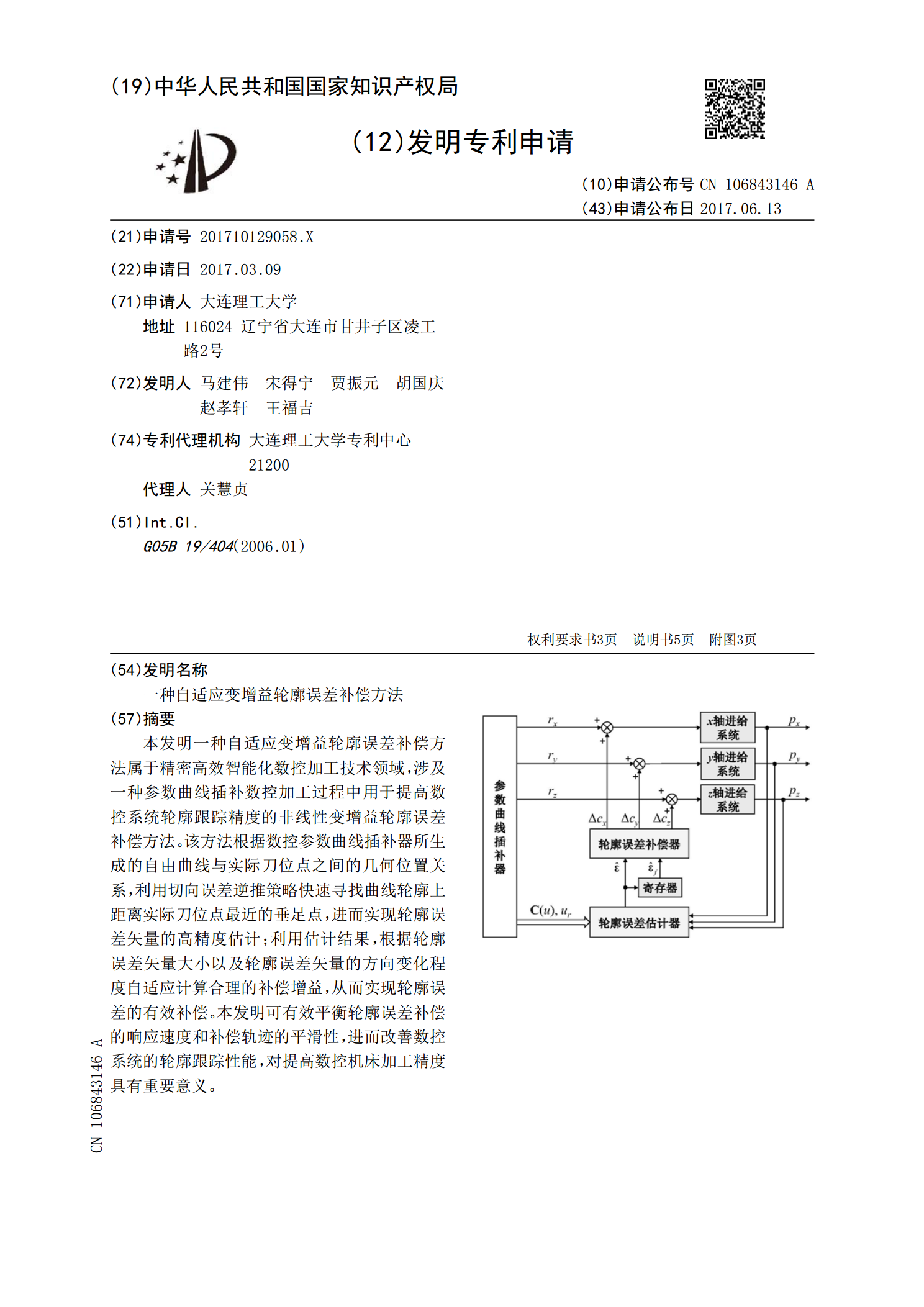
本发明一种自适应变增益轮廓误差补偿方法属于精密高效智能化数控加工技术领域,涉及一种参数曲线插补数控加工过程中用于提高数控系统轮廓跟踪精度的非线性变增益轮廓误差补偿方法。该方法根据数控参数曲线插补器所生成的自由曲线与实际刀位点之间的几何位置关系,利用切向误差逆推策略快速寻找曲线轮廓上距离实际刀位点最近的垂足点,进而实现轮廓误差矢量的高精度估计;利用估计结果,根据轮廓误差矢量大小以及轮廓误差矢量的方向变化程度自适应计算合理的补偿增益,从而实现轮廓误差的有效补偿。本发明可有效平衡轮廓误差补偿的响应速度和补偿轨迹