
基于干扰观测滑模变结构的轮廓误差交叉耦合控制方法.pdf

猫巷****雪凝

1/10

2/10
3/10
4/10
5/10
6/10
7/10
8/10

9/10
10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于干扰观测滑模变结构的轮廓误差交叉耦合控制方法.pdf
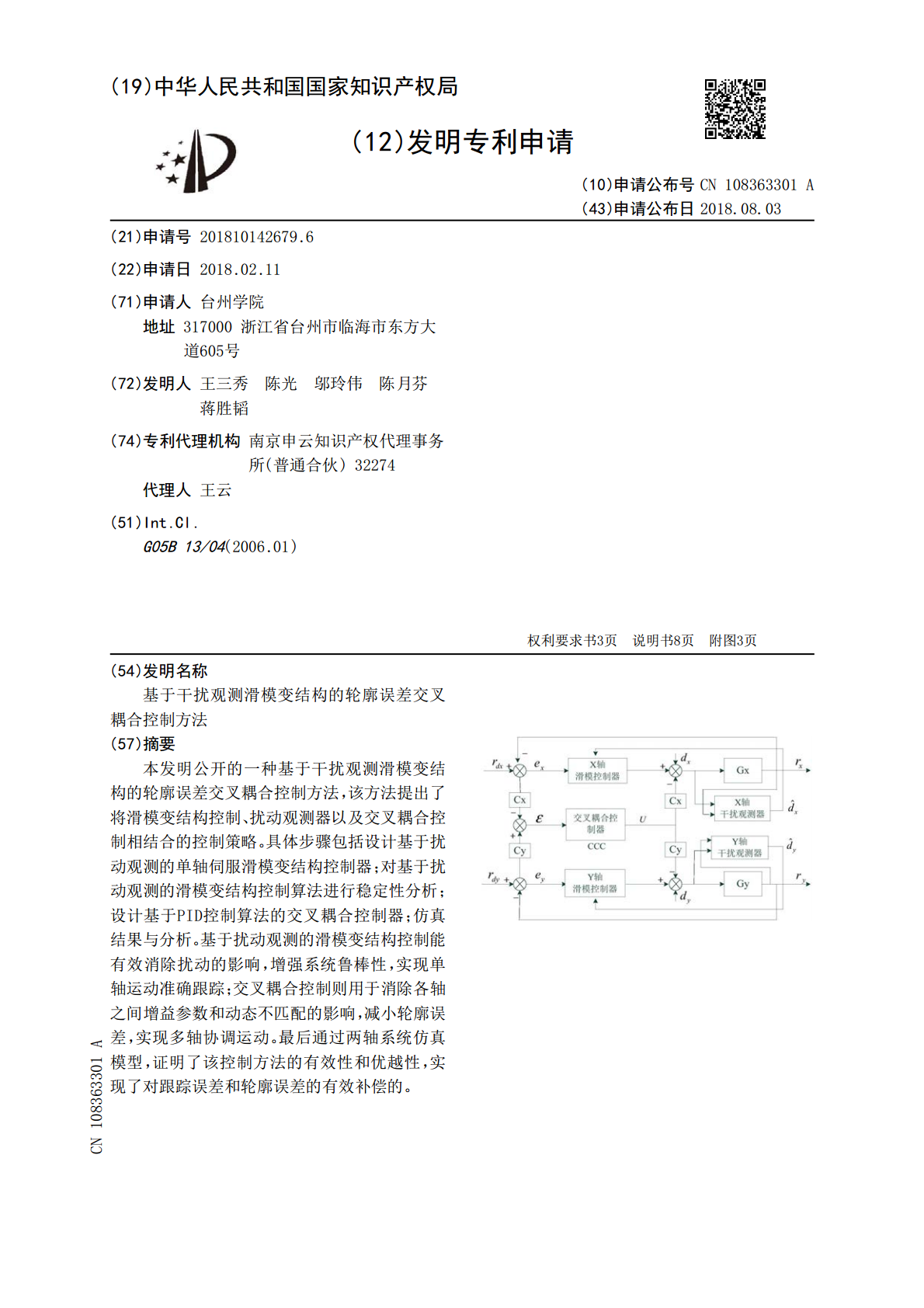
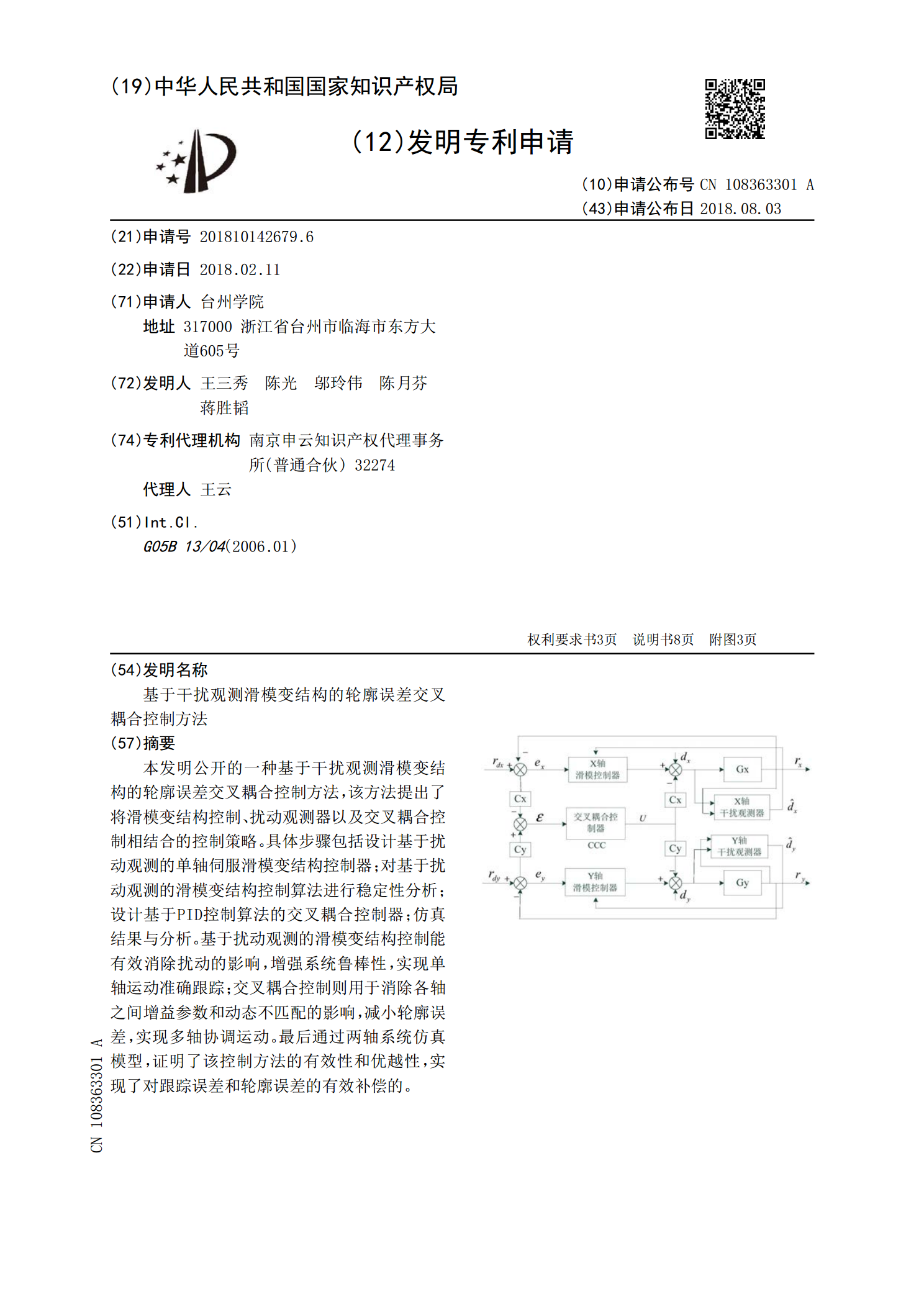
本发明公开的一种基于干扰观测滑模变结构的轮廓误差交叉耦合控制方法,该方法提出了将滑模变结构控制、扰动观测器以及交叉耦合控制相结合的控制策略。具体步骤包括设计基于扰动观测的单轴伺服滑模变结构控制器;对基于扰动观测的滑模变结构控制算法进行稳定性分析;设计基于PID控制算法的交叉耦合控制器;仿真结果与分析。基于扰动观测的滑模变结构控制能有效消除扰动的影响,增强系统鲁棒性,实现单轴运动准确跟踪;交叉耦合控制则用于消除各轴之间增益参数和动态不匹配的影响,减小轮廓误差,实现多轴协调运动。最后通过两轴系统仿真模型,证明

滑模变结构控制方法.ppt
滑模变结构控制问题:什么是变结构系统?变结构控制(variable.structurecontrol,VSC)本质上是一类特殊的非线性控制,其非线性表现为控制的不连续性。这种控制策略与其他控制的不同之处在于系统的“结构”并不固定,可以在动态过程中,根据系统当前的状态(如偏差及其各阶导数等)有目的地不断变化,迫使系统按照预定“滑动模态”的状态轨迹运动,所以又常称变结构控制为滑动模态控制(slidingmodecontrol,SMC),即滑模变结构控制。定义1:系统结构系统的一种结构为系统的一种模型,即由某一

基于LTR观测器的PH值滑模变结构控制方法研究的任务书.docx
基于LTR观测器的PH值滑模变结构控制方法研究的任务书一、研究背景PH值作为一种重要的化学参数,直接反映了溶液中酸碱性的程度。在许多生产和科研过程中,PH值的控制非常重要,通常需要通过现场测试或传感器等方法实现。而PH值的变化对于一些生化反应、细胞培养、水处理等方面的应用也具有关键性的意义,因此对PH值的控制具有很高的研究价值和实际应用意义。在实际控制过程中,PH值的控制通常采用PID控制器,但是由于PH值的变化过程具有非线性、耦合、时变的特点,因此PID控制器在一些情况下的鲁棒性和控制效果并不理想。为此

基于LabVIEW的滑模变结构控制实验研究.pdf
基于的滑模变结构控制实验研究TheexperimentbytheslidingmodevariablestructurecontrolbasedonLabVIEW董彩云

一种基于干扰观测器的主动型膝上假肢终端滑模控制方法.pdf
本发明公开了一种基于干扰观测器的主动型膝上假肢终端滑模控制方法。该方法离线采集患者的基本信息数据,生成数据报告;在不改变基本构造和相互作用方式的前提下,将人体下肢简化为二连杆模型进行分析,针对人体行走过程中摆动期和支撑期的运动形式的差异,得出支撑期和摆动期的下肢动力学模型;对下肢动力学模型设计干扰观测器和终端滑模控制器。该方法将滑模变结构控制理论引入到主动型膝上假肢的控制中,在保留了传统滑模控制的抗干扰能力和快速响应等优点的同时,削弱了控制量的抖振程度,使模型系统的跟踪误差能够在有限时间内收敛到零。该方法