
限制目标转向角的车辆用转向控制装置.pdf

一吃****书竹


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

限制目标转向角的车辆用转向控制装置.pdf
本发明涉及限制目标转向角的车辆用转向控制装置。在装备有用于辅助转向盘对转向轮的转向的动力转向装置的车辆中,当转向轮的转向角达到预定最大转向角时,转向控制装置将用于使所述动力转向装置作动的目标转向角限制为预定水平或低于该预定水平,或者将作用在所述动力转向装置上的转向反作用力限制为预定水平或低于该预定水平,以便能够稳定地维持转向轮的转向状态,同时防止过剩负荷作用在所述动力转向装置上。所述目标转向角可计算为基于转向盘的转动角和车辆的转弯举动控制的值。
车辆用转向控制装置.pdf
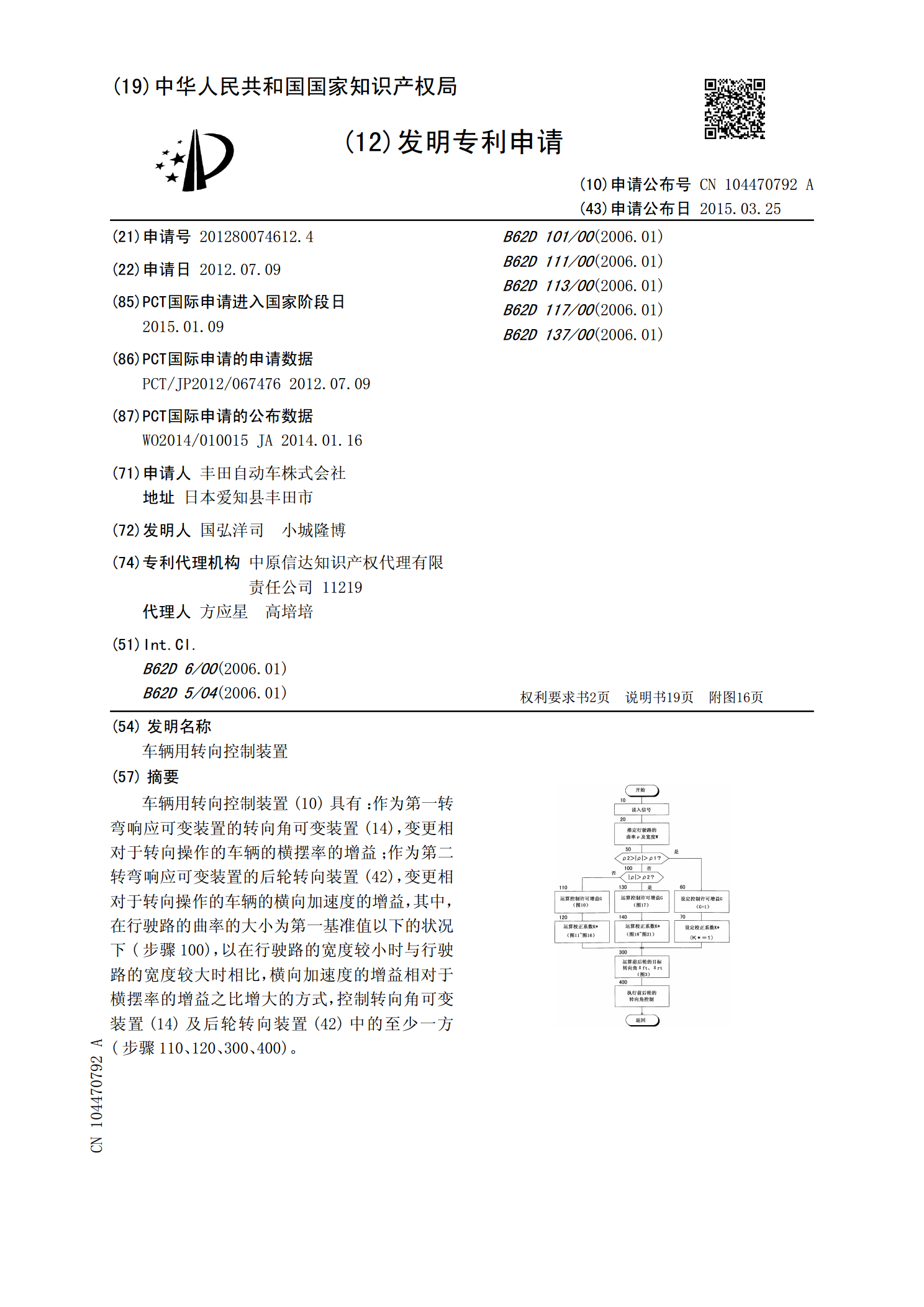
车辆用转向控制装置(10)具有:作为第一转弯响应可变装置的转向角可变装置(14),变更相对于转向操作的车辆的横摆率的增益;作为第二转弯响应可变装置的后轮转向装置(42),变更相对于转向操作的车辆的横向加速度的增益,其中,在行驶路的曲率的大小为第一基准值以下的状况下(步骤100),以在行驶路的宽度较小时与行驶路的宽度较大时相比,横向加速度的增益相对于横摆率的增益之比增大的方式,控制转向角可变装置(14)及后轮转向装置(42)中的至少一方(步骤110、120、300、400)。
车辆用转向控制装置.pdf
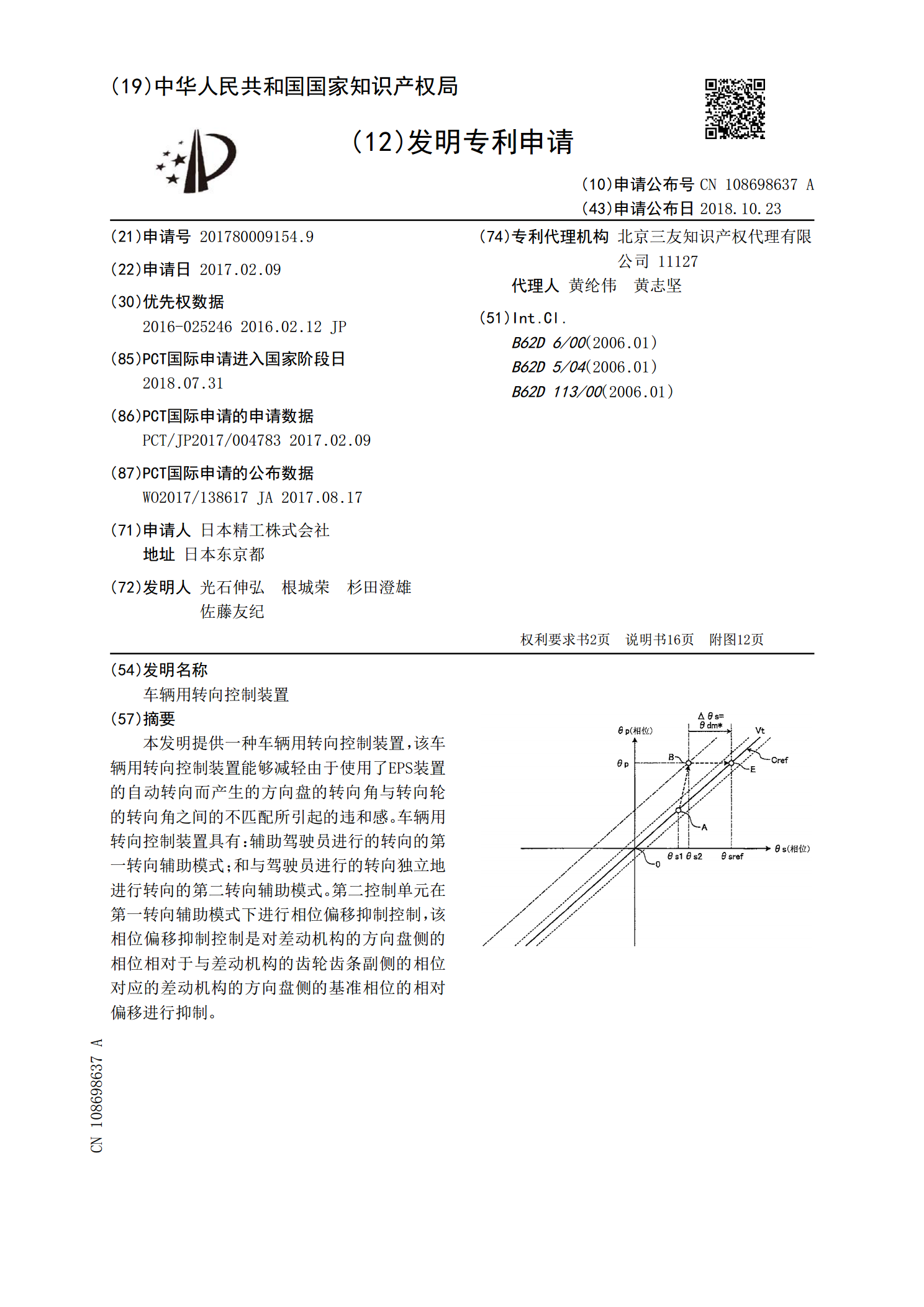
本发明提供一种车辆用转向控制装置,该车辆用转向控制装置能够减轻由于使用了EPS装置的自动转向而产生的方向盘的转向角与转向轮的转向角之间的不匹配所引起的违和感。车辆用转向控制装置具有:辅助驾驶员进行的转向的第一转向辅助模式;和与驾驶员进行的转向独立地进行转向的第二转向辅助模式。第二控制单元在第一转向辅助模式下进行相位偏移抑制控制,该相位偏移抑制控制是对差动机构的方向盘侧的相位相对于与差动机构的齿轮齿条副侧的相位对应的差动机构的方向盘侧的基准相位的相对偏移进行抑制。
车辆用转向控制装置.pdf
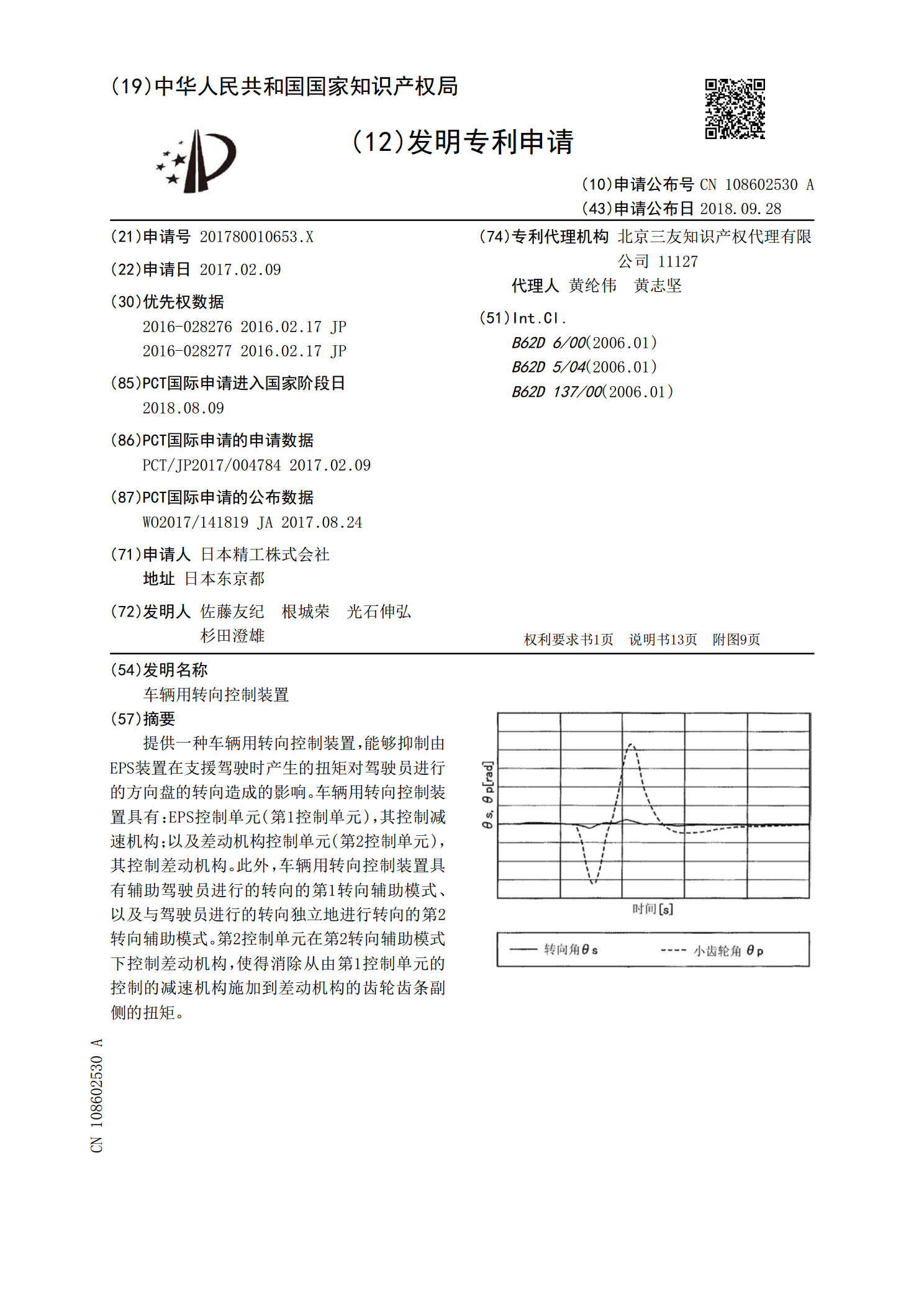
提供一种车辆用转向控制装置,能够抑制由EPS装置在支援驾驶时产生的扭矩对驾驶员进行的方向盘的转向造成的影响。车辆用转向控制装置具有:EPS控制单元(第1控制单元),其控制减速机构;以及差动机构控制单元(第2控制单元),其控制差动机构。此外,车辆用转向控制装置具有辅助驾驶员进行的转向的第1转向辅助模式、以及与驾驶员进行的转向独立地进行转向的第2转向辅助模式。第2控制单元在第2转向辅助模式下控制差动机构,使得消除从由第1控制单元的控制的减速机构施加到差动机构的齿轮齿条副侧的扭矩。

带有转向限制机构的车辆和车辆的转向控制方法.pdf
一种车辆,包括:行走机构;转向机构,控制所述行走机构的行进方向;转向限制启动机构;以及转向限制机构,其中,所述转向限制启动机构致动所述转向限制机构以限制行驶中的所述车辆的转向。有利地,所述行走机构包括左侧驱动轮和右侧驱动轮;所述转向限制机构通过调节两侧驱动轮的旋转速度差控制所述行走机构相对于当前行进方向的转向角度。