
轮胎平衡机的系统标定方法.pdf

是雁****找我


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

轮胎平衡机的系统标定方法.pdf
本发明提供一种轮胎平衡机的系统标定方法,包括:步骤1,提供一轮胎平衡机;步骤2,提供一标准轮胎,将该轮胎装卡于主轴上,运行一次,并记录该次运行的数据;步骤3,在轮胎靠近机箱的一侧0度位置处贴一个质量为m的铅块,运行一次,并记录该次运行的数据;步骤4,在轮胎远离机箱的一侧0度位置处贴一个质量为m的铅块,运行一次,并记录该次运行的数据;步骤5,对上述获得的三组数据进行算法处理,进行标定算法处理算出左、右侧传感器的标定系数k1和k2。本发明在用轮胎平衡机进行测量前,对传感器感应力与感应电压信号之间的线性关系进行

轮胎平衡系统的标定方法.pdf
本发明公开了一种轮胎平衡系统的标定方法,包括步骤:主轴空转时获取该状态下的第一压力传感器的向量数据AO以及第二压力传感器的向量数据BO;在主轴上设置一轮胎,获取轮胎与测量尺的距离distA、轮胎宽度wid、轮胎半径R、第一压力传感器与第二压力传感器之间的距离distB;旋转主轴获取向量数据A1以及B1;于轮胎内侧面加载一质量为m1的平衡块,旋转主轴获取向量数据A2以及B2;变换平衡块位置获取向量数据A3以及B3;记录光栅盘获取的第三位置数据Delta;最后根据上述数据经计算获取标定参数K1、K2、K3、K

轮胎平衡机制动系统及其制动方法.pdf
本发明公开了一种轮胎平衡机制动系统,包括用于驱动主轴总成旋转的交流电机、用于监测主轴总成转速的转速传感器,以及用于接收转速传感器的信号并控制交流电机反转或停机的平衡机主控板。本发明还公开了一种用轮胎平衡机制动系统的制动方法,包括以下步骤:平衡机主控板发出电机反转信号;正转的交流电机接收反转信号,通过改变交流电机的电磁场转矩方向进行减速,并带动主轴总成减速;转速传感器监测主轴总成的转速,并将监测的转速信号传递至平衡机主控板;平衡机主控板接收转速传感器的转速信号,在转速接近0时,平衡机主控板发出控制信号使电机

基于复影响系数的载重轮胎动平衡机标定算法.docx
基于复影响系数的载重轮胎动平衡机标定算法摘要:载重轮胎动平衡机是一种用于测量车载轮胎在行驶过程中的动平衡性质的设备。本文将讨论基于复影响系数的载重轮胎动平衡机标定算法。该算法是一种基于复影响系数的数学模型,能够有效地分析轮胎的动力学性质并进行准确的测定和标定。介绍:现代交通工具普遍采用四轮驱动,车轮对行驶过程中的稳定性至关重要。轮胎的动平衡问题会导致车辆的安全性、舒适性下降,同时也会导致轮胎磨损加剧,减少使用寿命。因此,对于载重车辆的轮胎进行动平衡测试和标定十分重要。载重轮胎动平衡机是一种专门用于对车载轮
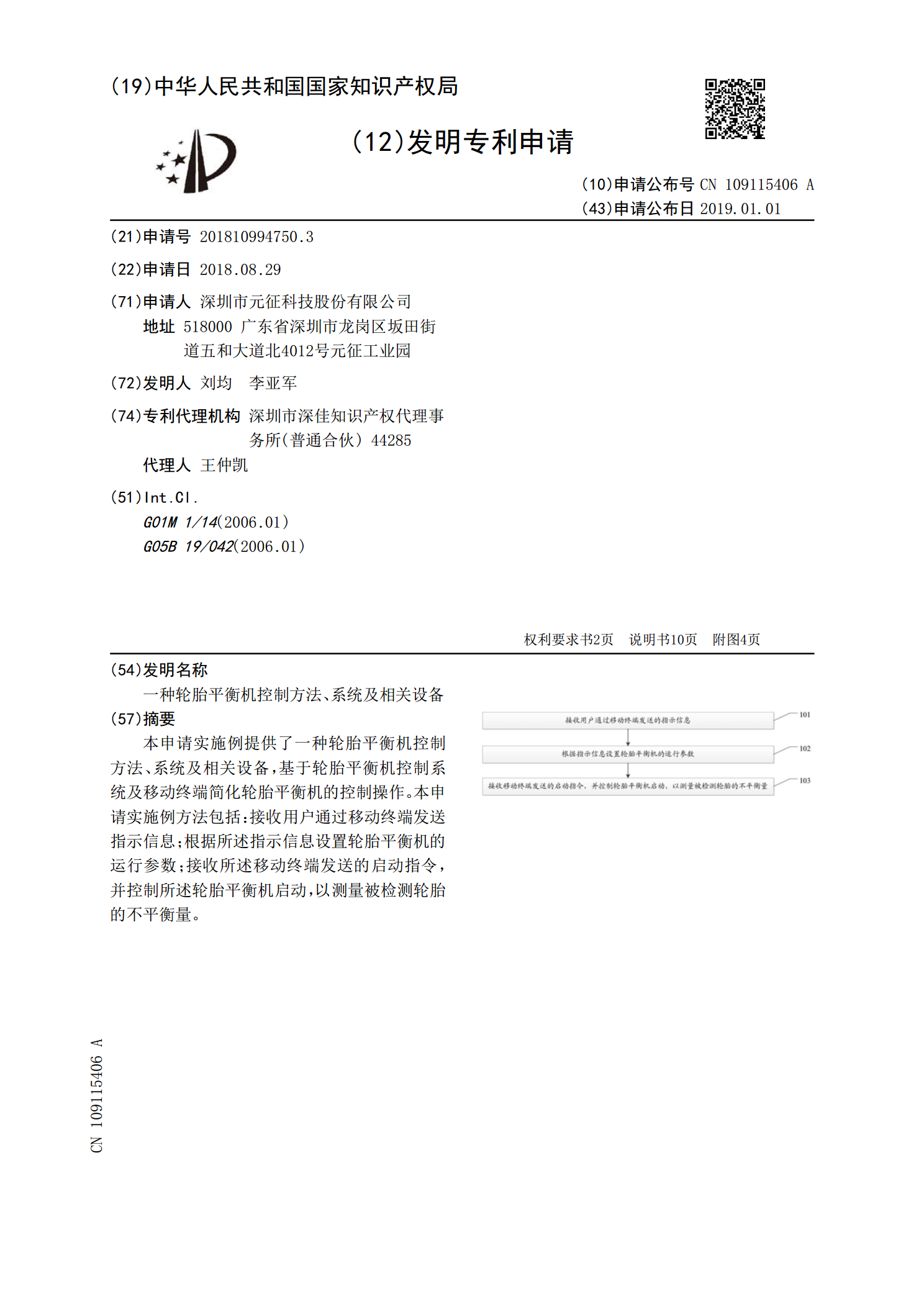
一种轮胎平衡机控制方法、系统及相关设备.pdf
本申请实施例提供了一种轮胎平衡机控制方法、系统及相关设备,基于轮胎平衡机控制系统及移动终端简化轮胎平衡机的控制操作。本申请实施例方法包括:接收用户通过移动终端发送指示信息;根据所述指示信息设置轮胎平衡机的运行参数;接收所述移动终端发送的启动指令,并控制所述轮胎平衡机启动,以测量被检测轮胎的不平衡量。