
一种适时可变传动比的电动助力转向系统及其控制方法.pdf

灵慧****89


1/9

2/9

3/9

4/9

5/9

6/9

7/9

8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种适时可变传动比的电动助力转向系统及其控制方法.pdf
一种适时可变传动比的电动助力转向系统及其控制方法,属于电动助力转向系统。该系统包括由转向盘(1)、转矩传感器(2)、转向电机(3)、行星轮(4)、太阳轮(5)、齿圈(6)、转向管柱(38)、助力电机(7)、减速机构(8)、齿条(9)、转向摇臂(10)、前轮(11)、电子控制单元ECU(12)、预前电子控制模块ECUa(27)、车载卫星导航仪(28)、车载前视路况仪(29)、自适应记忆电子控制模块ECUb(30);通过在转矩传感器和齿轮齿条之间增加了行星齿轮机构、转向同步离合器和转向电机,电动助力转向系统可

可变传动比的电动助力转向系统及其传动比控制方法.pdf
一种可变传动比的电动助力转向系统及其传动比控制方法,属于电动助力转向系统。本发明在转矩传感器和齿轮齿条之间增加了行星齿轮机构和转向电机,电动助力转向系统可在完成原有电动助力转向的基础上,实现变传动比控制和主动转向干预功能。
一种可变传动比机构及可变传动比转向系统及其控制方法.pdf
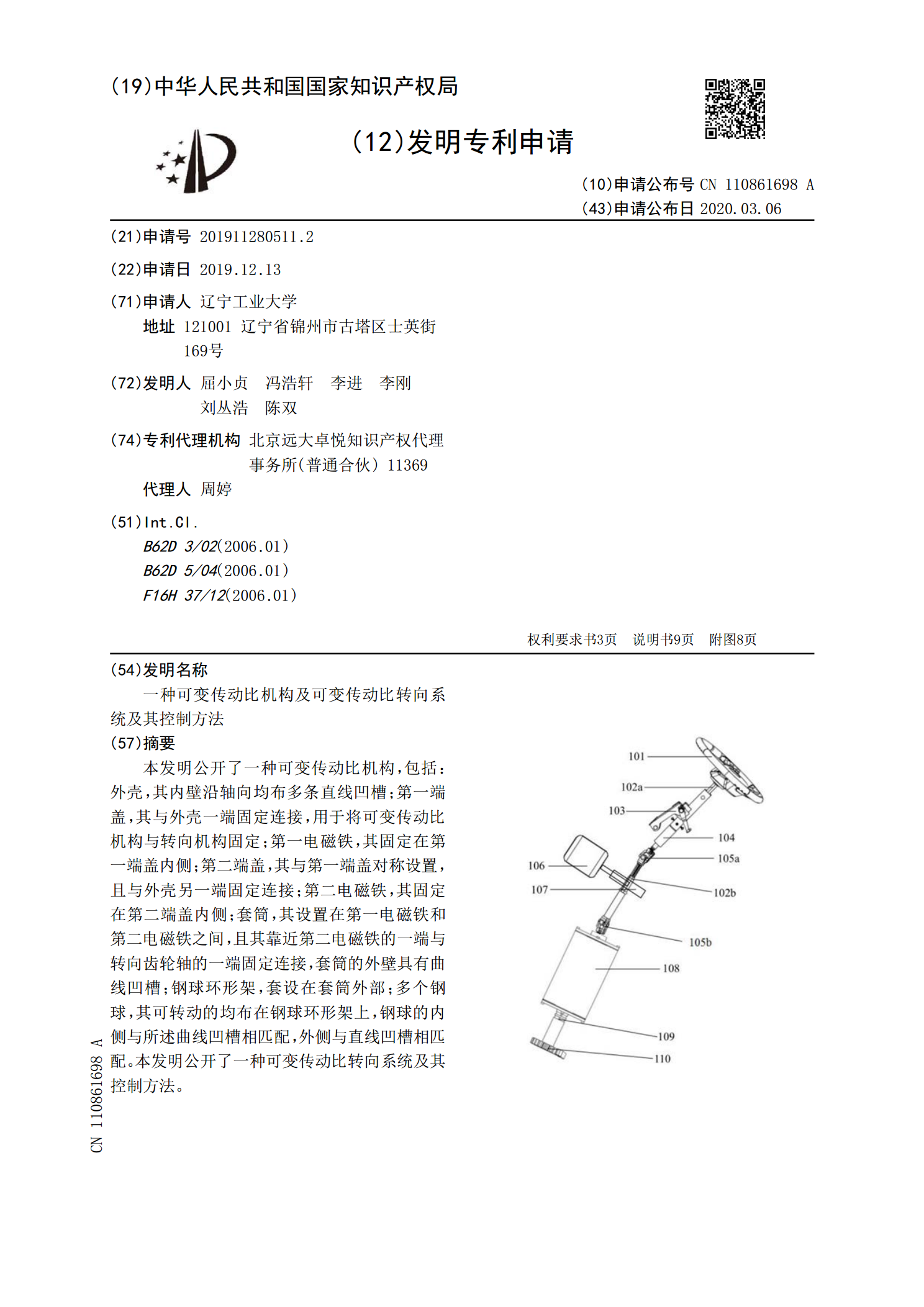
本发明公开了一种可变传动比机构,包括:外壳,其内壁沿轴向均布多条直线凹槽;第一端盖,其与外壳一端固定连接,用于将可变传动比机构与转向机构固定;第一电磁铁,其固定在第一端盖内侧;第二端盖,其与第一端盖对称设置,且与外壳另一端固定连接;第二电磁铁,其固定在第二端盖内侧;套筒,其设置在第一电磁铁和第二电磁铁之间,且其靠近第二电磁铁的一端与转向齿轮轴的一端固定连接,套筒的外壁具有曲线凹槽;钢球环形架,套设在套筒外部;多个钢球,其可转动的均布在钢球环形架上,钢球的内侧与所述曲线凹槽相匹配,外侧与直线凹槽相匹配。本发
一种电动助力转向系统及其控制方法.pdf
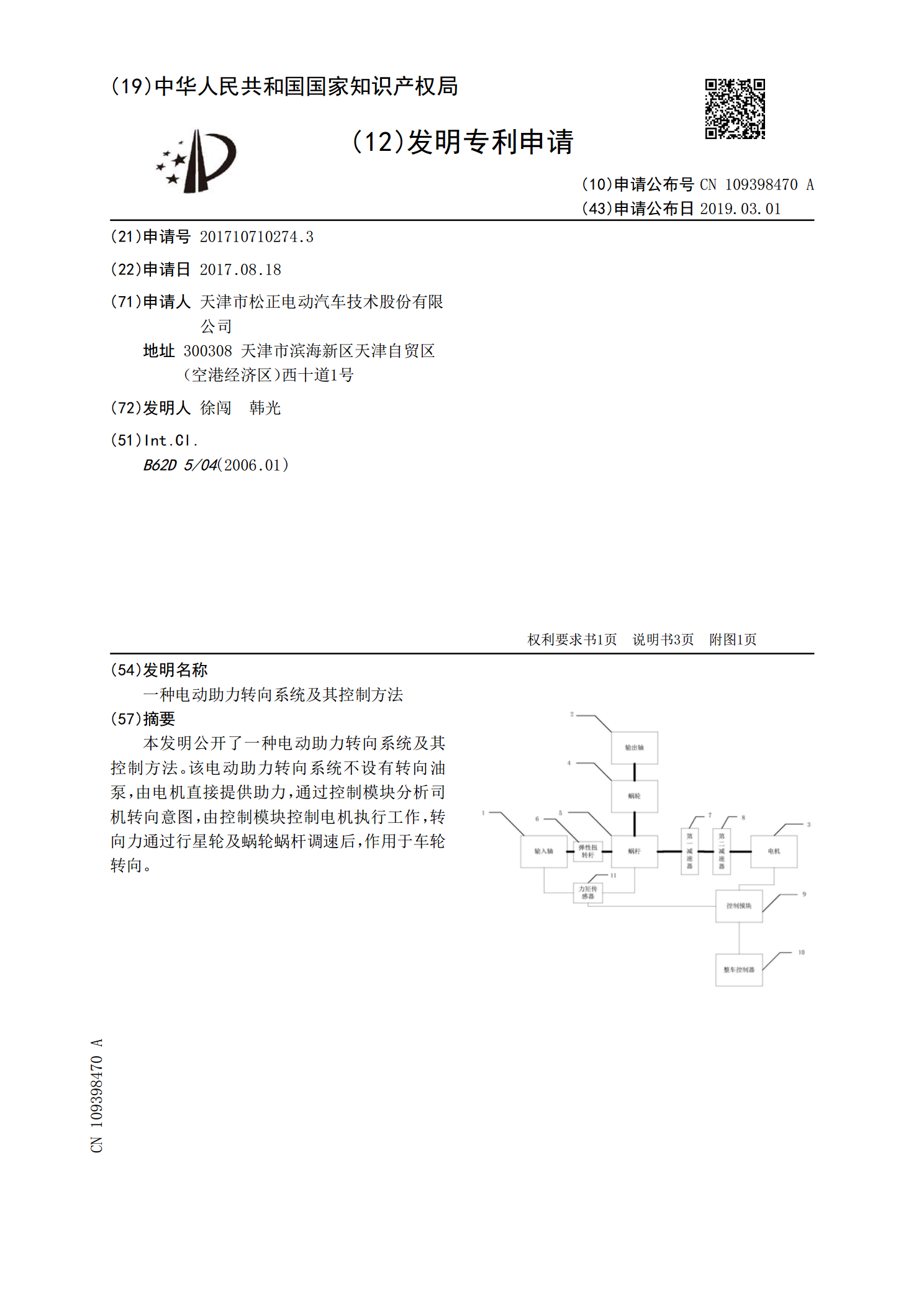
本发明公开了一种电动助力转向系统及其控制方法。该电动助力转向系统不设有转向油泵,由电机直接提供助力,通过控制模块分析司机转向意图,由控制模块控制电机执行工作,转向力通过行星轮及蜗轮蜗杆调速后,作用于车轮转向。
一种电动助力转向系统及其控制方法.pdf
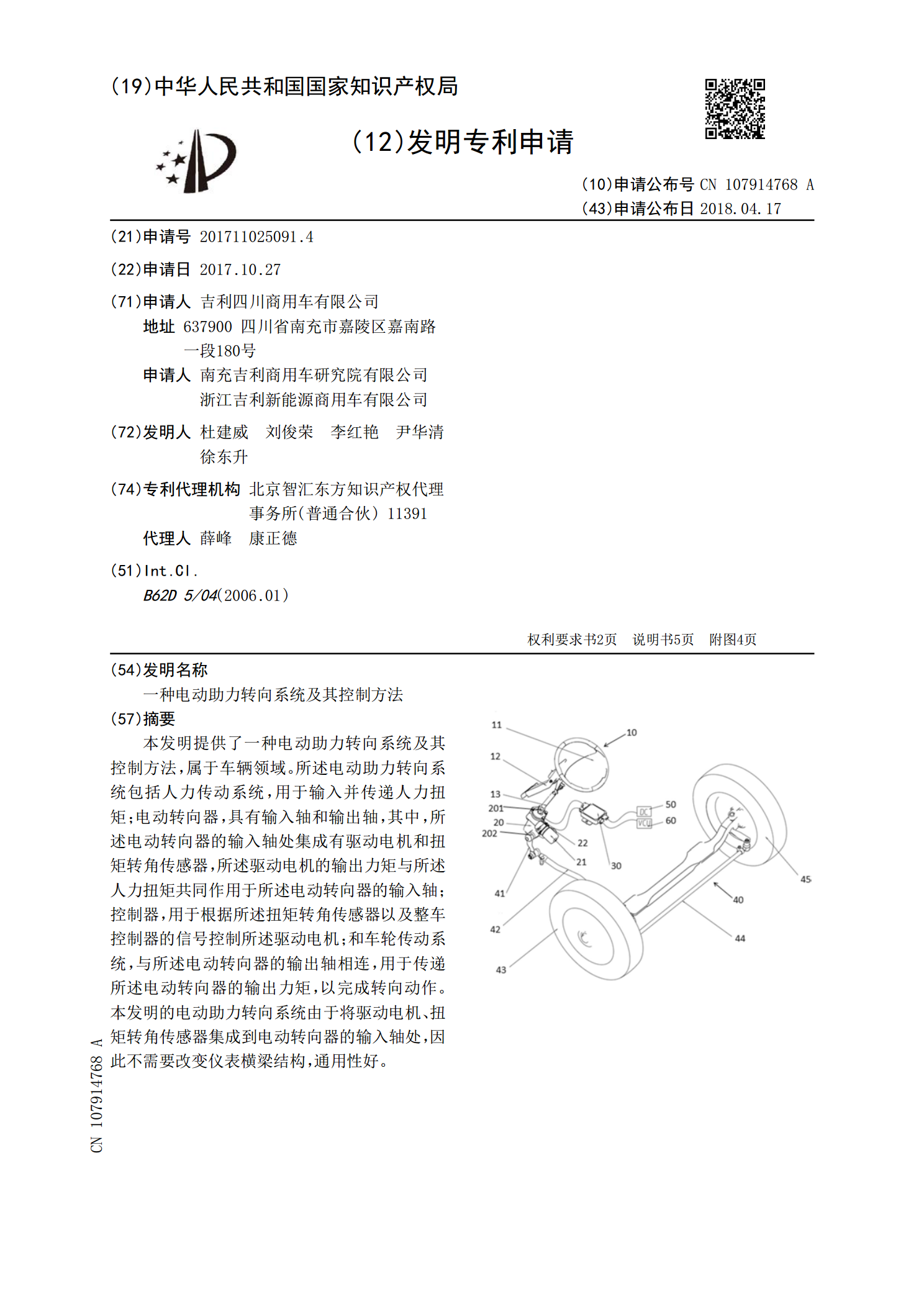
本发明提供了一种电动助力转向系统及其控制方法,属于车辆领域。所述电动助力转向系统包括人力传动系统,用于输入并传递人力扭矩;电动转向器,具有输入轴和输出轴,其中,所述电动转向器的输入轴处集成有驱动电机和扭矩转角传感器,所述驱动电机的输出力矩与所述人力扭矩共同作用于所述电动转向器的输入轴;控制器,用于根据所述扭矩转角传感器以及整车控制器的信号控制所述驱动电机;和车轮传动系统,与所述电动转向器的输出轴相连,用于传递所述电动转向器的输出力矩,以完成转向动作。本发明的电动助力转向系统由于将驱动电机、扭矩转角传感器集