
用于使关节伸展和弯曲的带多电机组件的致动器系统.pdf

邻家****文章

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
用于使关节伸展和弯曲的带多电机组件的致动器系统.pdf
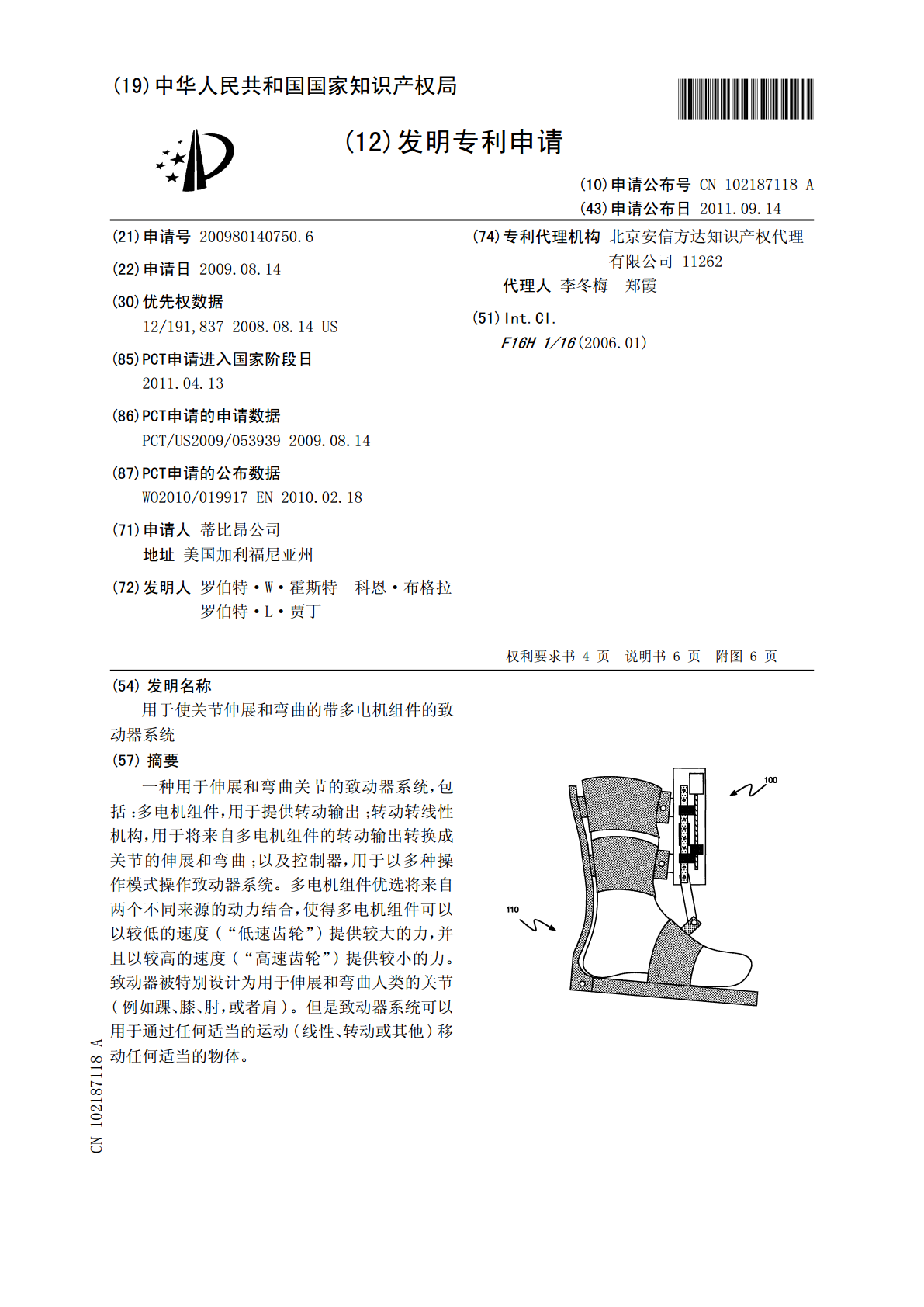
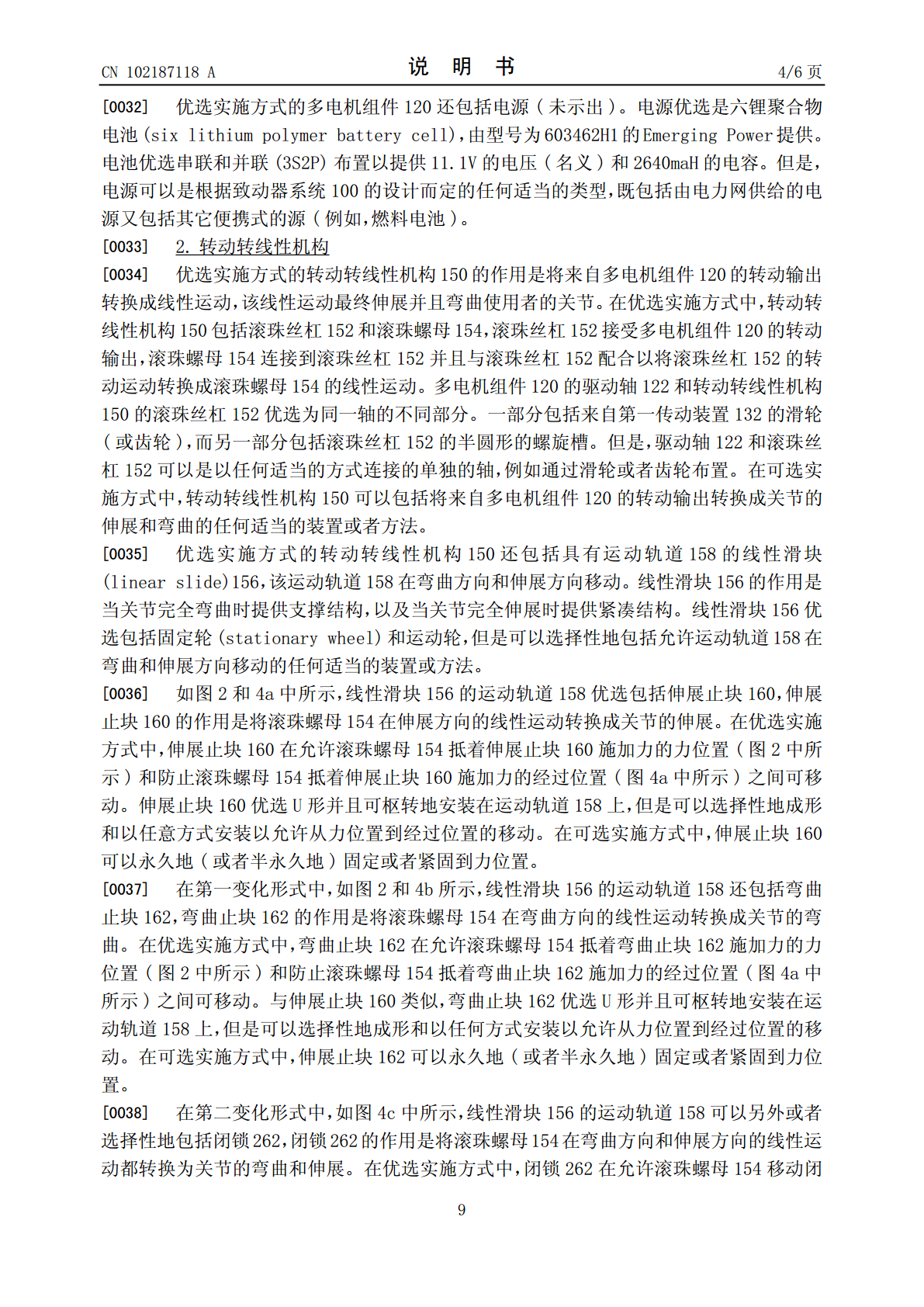
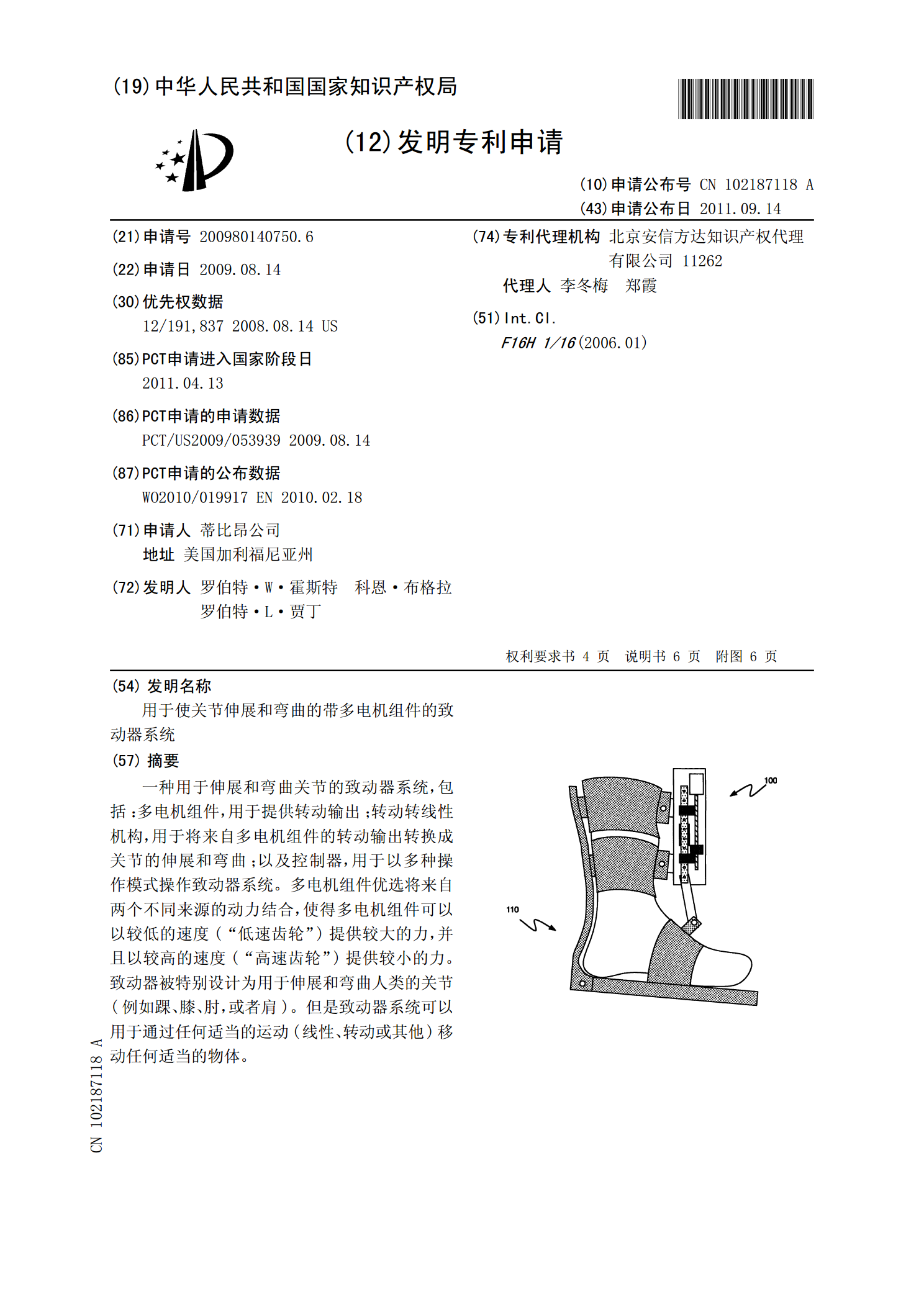
一种用于伸展和弯曲关节的致动器系统,包括:多电机组件,用于提供转动输出;转动转线性机构,用于将来自多电机组件的转动输出转换成关节的伸展和弯曲;以及控制器,用于以多种操作模式操作致动器系统。多电机组件优选将来自两个不同来源的动力结合,使得多电机组件可以以较低的速度(“低速齿轮”)提供较大的力,并且以较高的速度(“高速齿轮”)提供较小的力。致动器被特别设计为用于伸展和弯曲人类的关节(例如踝、膝、肘,或者肩)。但是致动器系统可以用于通过任何适当的运动(线性、转动或其他)移动任何适当的物体。

运行用于离合器操纵系统的致动器组件的方法和致动器组件.pdf
本发明涉及一种运行用于离合器操纵系统的致动器组件的方法,致动器组件包括电动机式操纵的、具有螺杆(4)的传动装置(2),螺杆将旋转运动转变成活塞(5)在轴向上的直线运动,其中,借助传感器装置(6、10)确定活塞(5)经过的轴向位移。在减小致动器组件的结构空间的方法中,电感式的传感器装置(6、10)和与活塞(5)连接的金属螺杆(4)作用式连接,其中,金属螺杆(4)用作确定轴向位移的传感器目标。
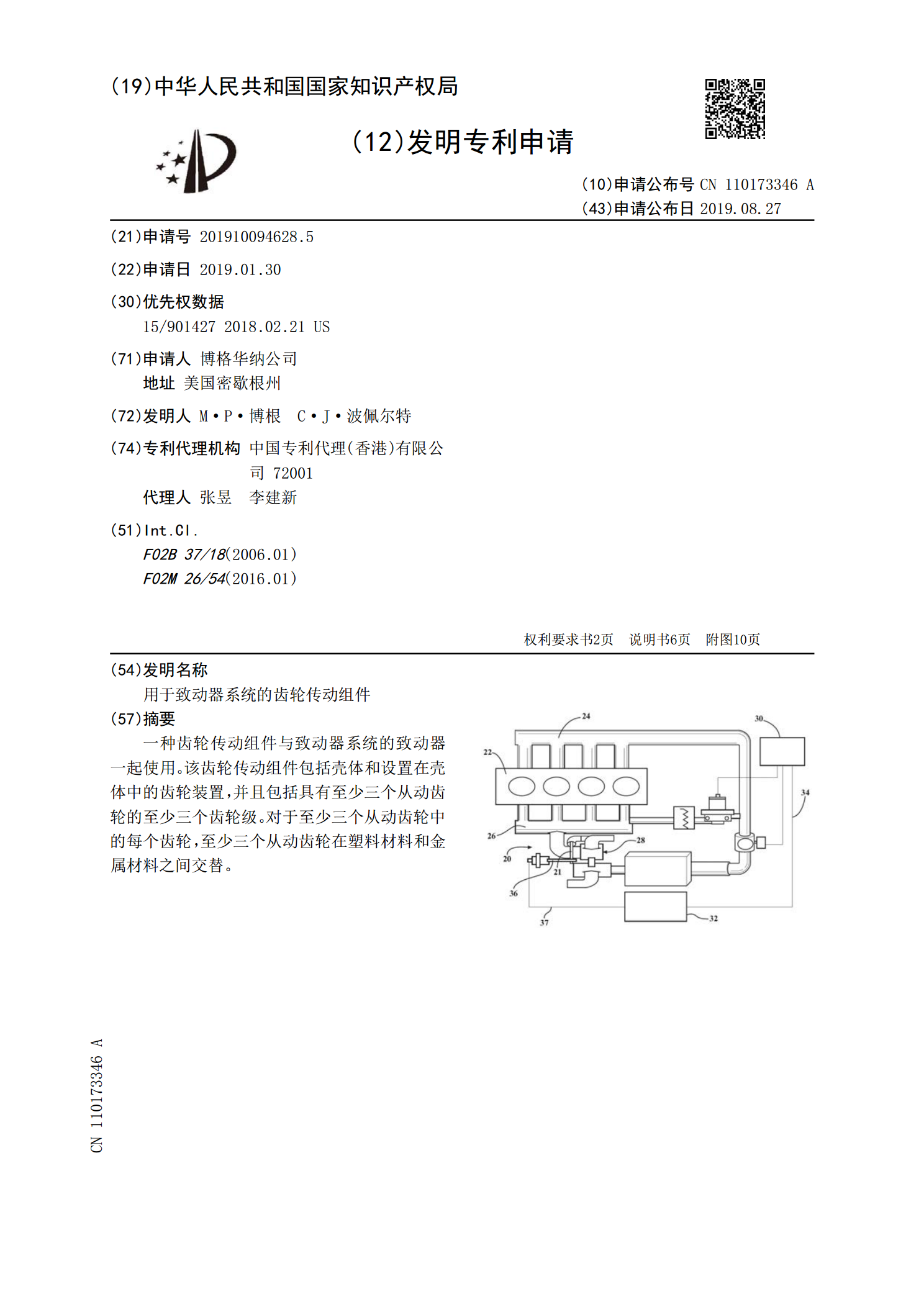
用于致动器系统的齿轮传动组件.pdf
一种齿轮传动组件与致动器系统的致动器一起使用。该齿轮传动组件包括壳体和设置在壳体中的齿轮装置,并且包括具有至少三个从动齿轮的至少三个齿轮级。对于至少三个从动齿轮中的每个齿轮,至少三个从动齿轮在塑料材料和金属材料之间交替。
用于药物输送系统的针致动器组件.pdf
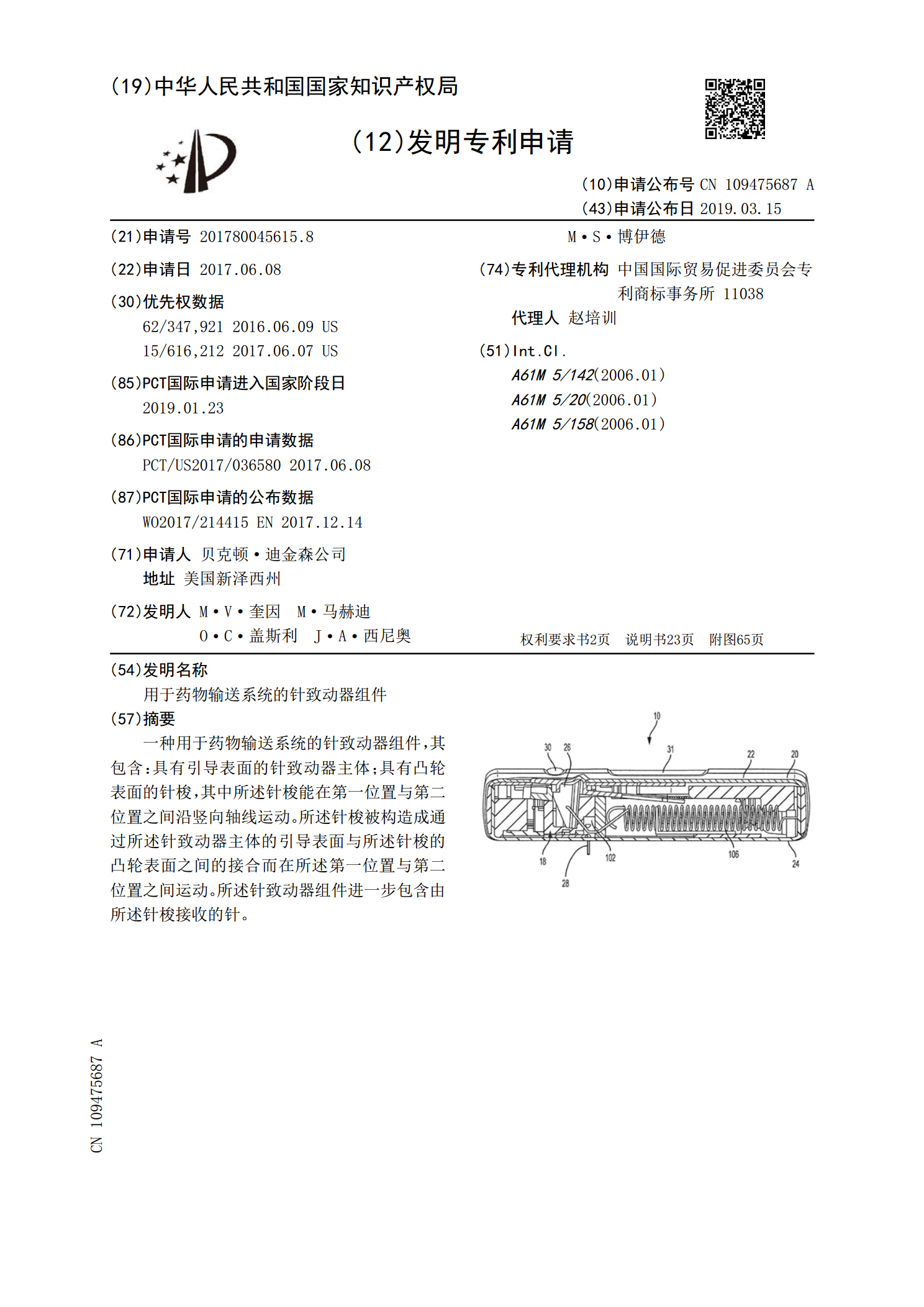
一种用于药物输送系统的针致动器组件,其包含:具有引导表面的针致动器主体;具有凸轮表面的针梭,其中所述针梭能在第一位置与第二位置之间沿竖向轴线运动。所述针梭被构造成通过所述针致动器主体的引导表面与所述针梭的凸轮表面之间的接合而在所述第一位置与第二位置之间运动。所述针致动器组件进一步包含由所述针梭接收的针。

底盘致动器和用于操作底盘致动器的变速器组件的方法.pdf
本发明涉及一种底盘致动器(1)、特别是用于后桥转向系统的底盘致动器,该底盘致动器包括旋转线性变速器(5),该旋转线性变速器设置成用于在输出侧联接至底盘元件,其中,变速器(5)的可旋转的输入侧元件(9)借助于至少一个轴向轴承(16、17)安装在壳体(13)中。变速器(5)借助于可调节的预加载装置(21)进行自锁设定,该预加载装置以轴向力对轴向轴承(16、17)进行加载。