
一种6自由度力反馈虚拟手术器械.pdf

努力****妙风


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种6自由度力反馈虚拟手术器械.pdf
本发明涉及一种6自由度力反馈虚拟手术器械,包括机械机构和控制模块,其中机械机构包括底座、回转支撑轴承、两个底板、两个支撑板、三个支承座、主轴、两个减速轮、四组拉杆、滚动轴承、两个关节连接件、齿轮组、剪刀手柄、四组执行元件,六组传感检测元件;控制模块包括角度信号采集模块、主控芯片模块、执行元件驱动模块和SCI通讯模块。本发明为实现虚拟手术中的力觉模拟,设计了力反馈器机械臂,具有多自由度、大位移空间、定位精确以及反应灵敏等优点,为虚拟手术人机交互提供了一个很好的硬件和软件平台;本发明的控制模块能够很好地实现力
一种两自由度虚拟手术的力反馈装置.pdf
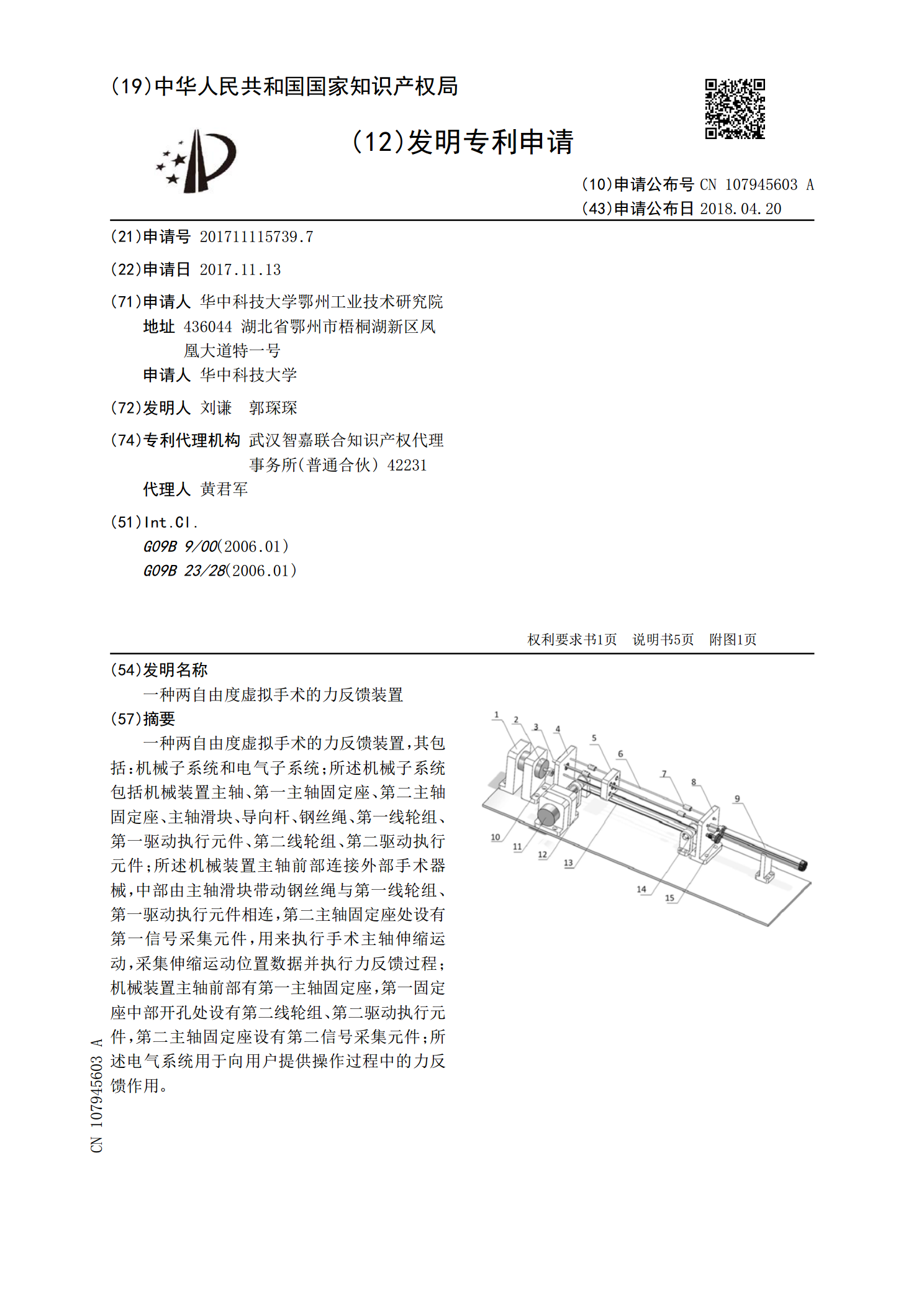
一种两自由度虚拟手术的力反馈装置,其包括:机械子系统和电气子系统;所述机械子系统包括机械装置主轴、第一主轴固定座、第二主轴固定座、主轴滑块、导向杆、钢丝绳、第一线轮组、第一驱动执行元件、第二线轮组、第二驱动执行元件;所述机械装置主轴前部连接外部手术器械,中部由主轴滑块带动钢丝绳与第一线轮组、第一驱动执行元件相连,第二主轴固定座处设有第一信号采集元件,用来执行手术主轴伸缩运动,采集伸缩运动位置数据并执行力反馈过程;机械装置主轴前部有第一主轴固定座,第一固定座中部开孔处设有第二线轮组、第二驱动执行元件,第二主

一种单自由度力反馈手柄.pdf
本发明涉及一种单自由度力反馈手柄,直流伺服电机的上端与手柄齿轮箱连接,下端与手柄控制箱连接,齿轮力反馈压板A与齿轮力反馈压板B的一端均插设于手柄齿轮箱内,且分别设置有齿轮A及齿轮B,齿轮B与直流伺服电机上端的输出轴连接,齿轮A通过轴系可相对转动地安装在手柄齿轮箱内,并与齿轮B相啮合,齿轮力反馈压板A与齿轮力反馈压板B的另一端为夹持端,在齿轮力反馈压板A与齿轮力反馈压板B的另一端中间设有安装在手柄齿轮箱上的角度限位板;手柄控制箱内分别容置有磁旋转编码器、手柄控制器及手柄驱动器,直流伺服电机下端的输出轴连接有

虚拟血管介入手术中的手术器械建模与力反馈技术研究的中期报告.docx
虚拟血管介入手术中的手术器械建模与力反馈技术研究的中期报告一、研究背景虚拟血管介入手术是一种新型的医疗模式,它利用计算机技术和模拟技术对血管系统进行影像学分析,并针对患者的具体情况进行手术仿真模拟,实时操作、精准定位,从而达到减少手术风险、提高手术效果的目的。虚拟血管介入手术需要使用手术器械进行操作,这些手术器械需要进行建模以实现虚拟手术的模拟,并需要将手术器械的力反馈给手术者,以提高手术操作的逼真度和准确性。二、研究内容本研究旨在实现虚拟血管介入手术器械的建模和力反馈功能,具体研究内容如下:1.虚拟手术

可分解为单自由度遥操作装置的二自由度虚拟力反馈装置.pdf
本发明公开了可分解为单自由度遥操作装置的二自由度虚拟力反馈装置,4根圆立柱连接面板和底板形成大台架,大力矩电机垂直固联于面板下;装有力和加速度传感器的大单摆臂经第一联轴套固联于大力矩电机转轴上端,该转轴下端接角位移传感器;下接圆立柱的4根短立柱支撑由4根小立柱连接小面板和基座板形成的小台架,小力矩电机安装在位于小台架下方的小面板上,大、小力矩电机的轴心线重合;摩擦传动轮经第三联轴套固联于小力矩电机转轴;类似大单摆臂的小单摆臂的根部固联于垂直安装在大单摆臂端部的传动轮轴上端,传动轮轴与摩擦传动轮由钢丝连接。