
一种两自由度虚拟手术的力反馈装置.pdf

努力****甲寅


1/8

2/8

3/8

4/8
5/8

6/8

7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种两自由度虚拟手术的力反馈装置.pdf
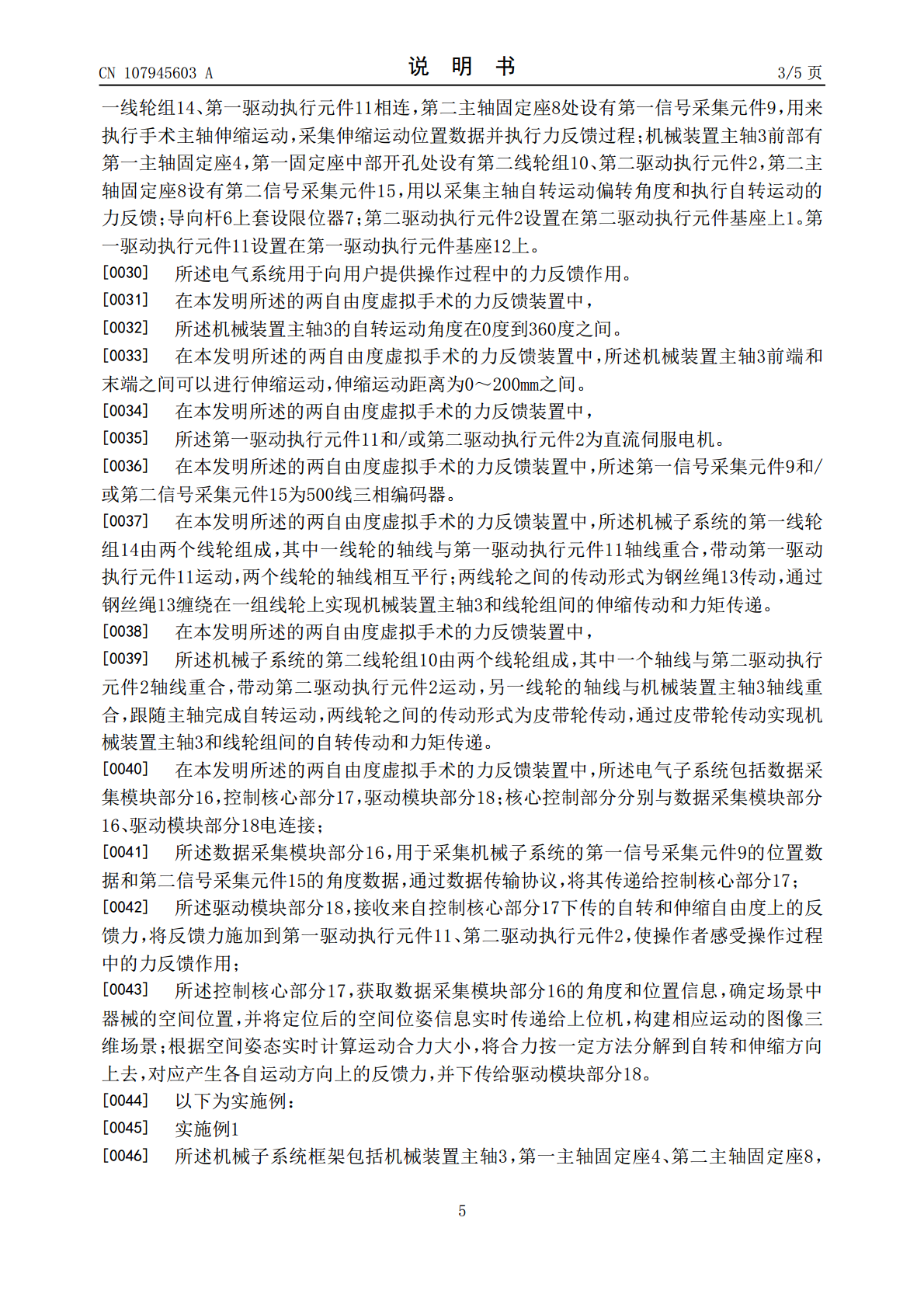
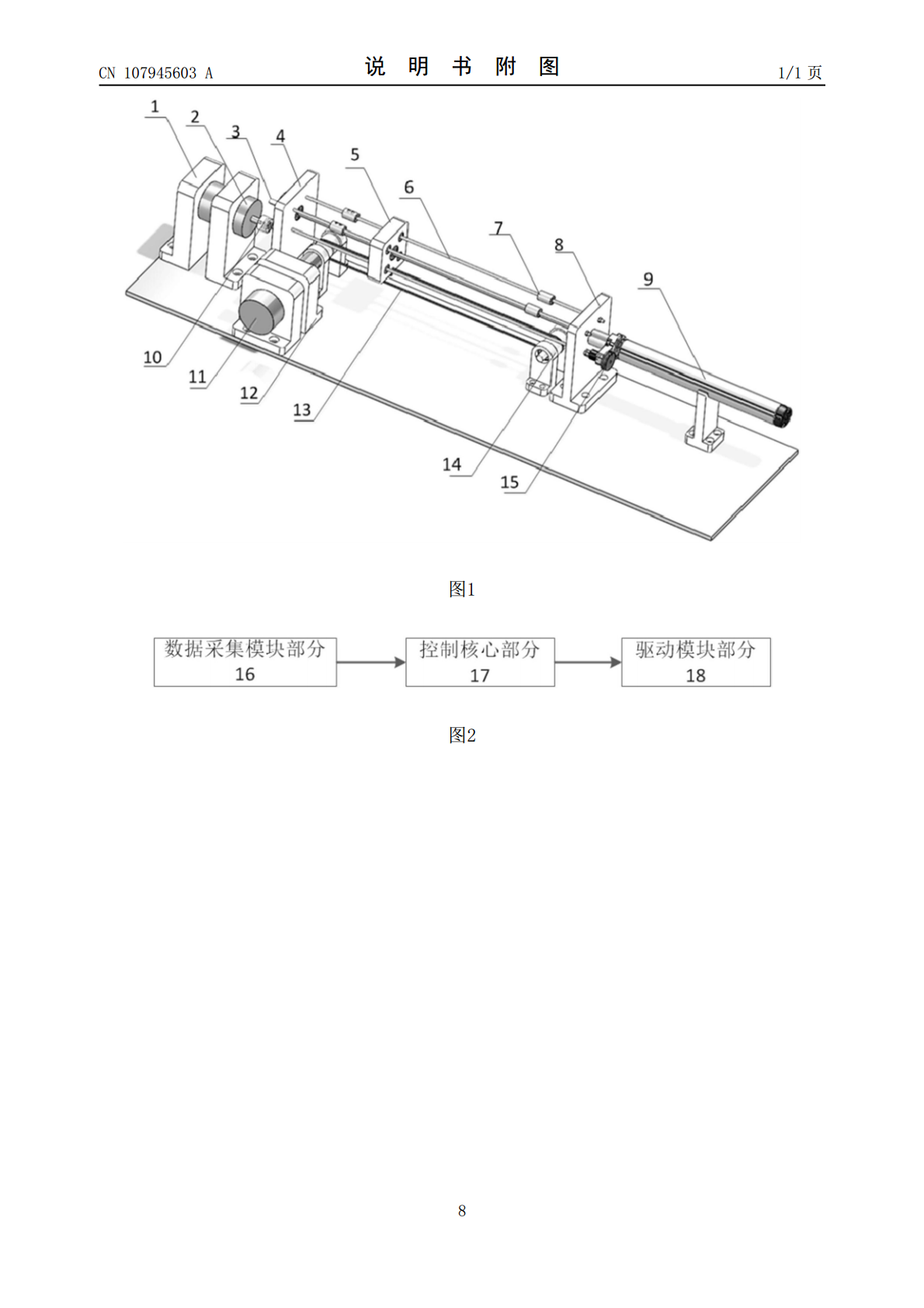
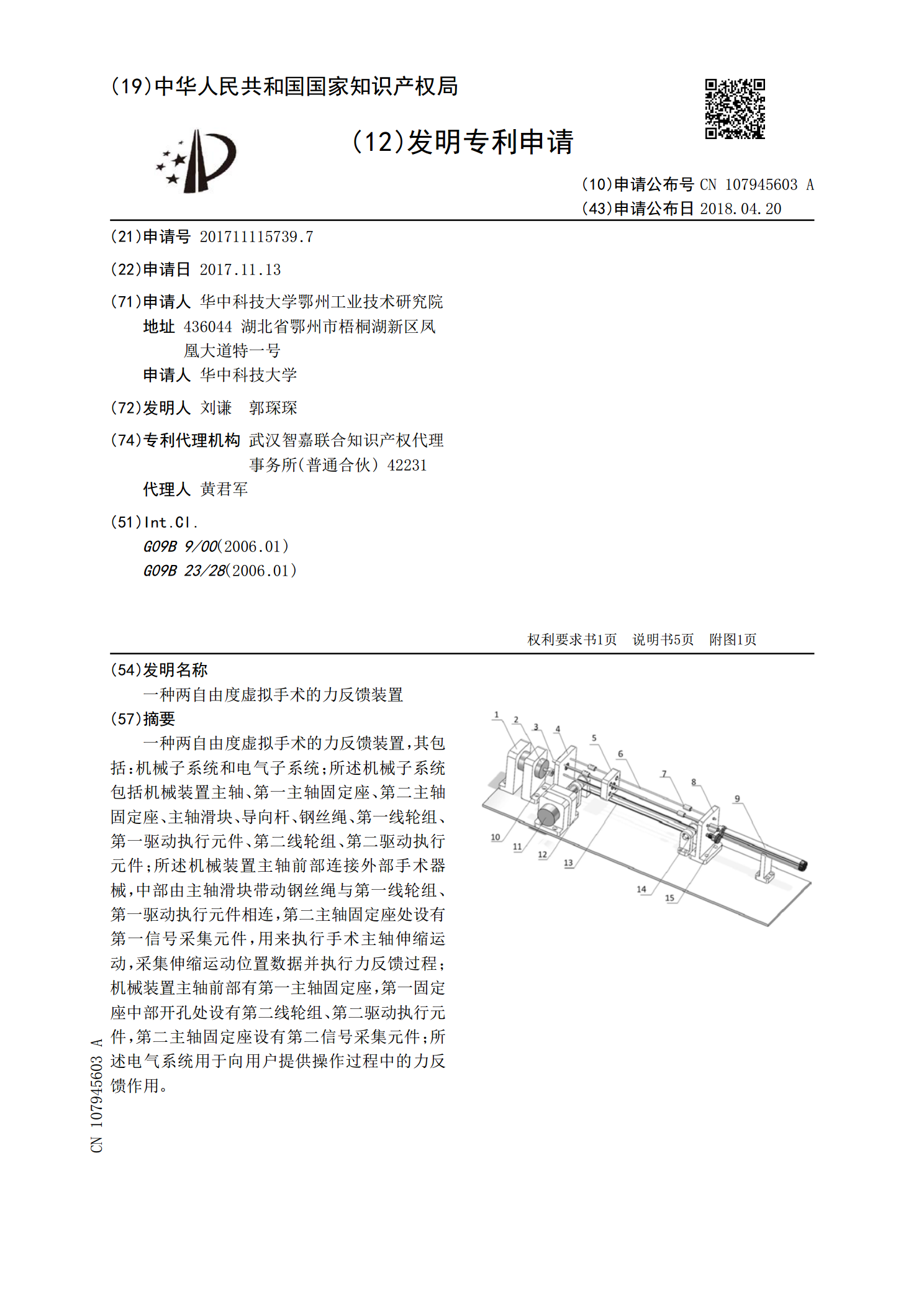
一种两自由度虚拟手术的力反馈装置,其包括:机械子系统和电气子系统;所述机械子系统包括机械装置主轴、第一主轴固定座、第二主轴固定座、主轴滑块、导向杆、钢丝绳、第一线轮组、第一驱动执行元件、第二线轮组、第二驱动执行元件;所述机械装置主轴前部连接外部手术器械,中部由主轴滑块带动钢丝绳与第一线轮组、第一驱动执行元件相连,第二主轴固定座处设有第一信号采集元件,用来执行手术主轴伸缩运动,采集伸缩运动位置数据并执行力反馈过程;机械装置主轴前部有第一主轴固定座,第一固定座中部开孔处设有第二线轮组、第二驱动执行元件,第二主

一种6自由度力反馈虚拟手术器械.pdf
本发明涉及一种6自由度力反馈虚拟手术器械,包括机械机构和控制模块,其中机械机构包括底座、回转支撑轴承、两个底板、两个支撑板、三个支承座、主轴、两个减速轮、四组拉杆、滚动轴承、两个关节连接件、齿轮组、剪刀手柄、四组执行元件,六组传感检测元件;控制模块包括角度信号采集模块、主控芯片模块、执行元件驱动模块和SCI通讯模块。本发明为实现虚拟手术中的力觉模拟,设计了力反馈器机械臂,具有多自由度、大位移空间、定位精确以及反应灵敏等优点,为虚拟手术人机交互提供了一个很好的硬件和软件平台;本发明的控制模块能够很好地实现力
一种用于胃肠镜手术的带力反馈的两自由度主手.pdf
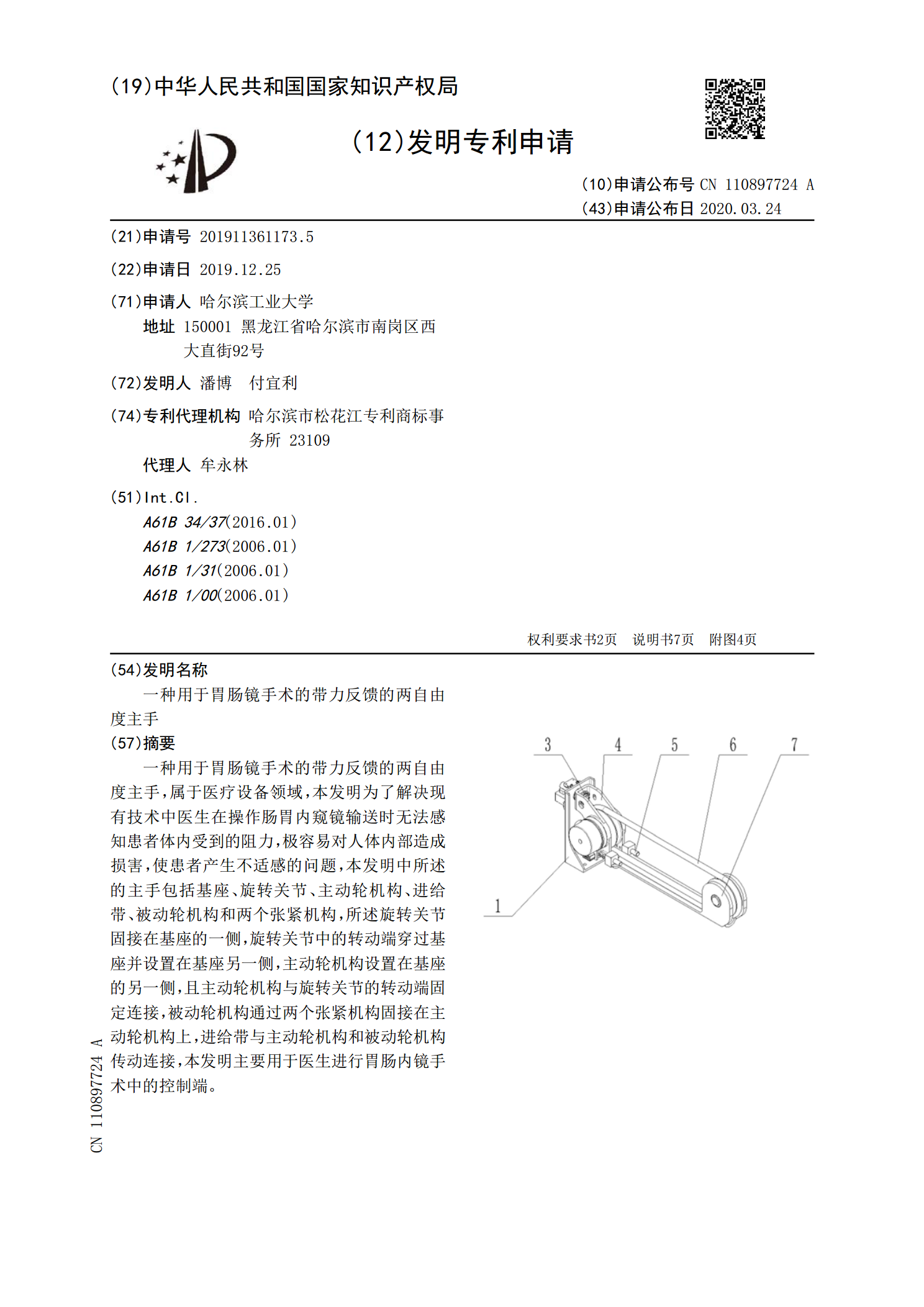
一种用于胃肠镜手术的带力反馈的两自由度主手,属于医疗设备领域,本发明为了解决现有技术中医生在操作肠胃内窥镜输送时无法感知患者体内受到的阻力,极容易对人体内部造成损害,使患者产生不适感的问题,本发明中所述的主手包括基座、旋转关节、主动轮机构、进给带、被动轮机构和两个张紧机构,所述旋转关节固接在基座的一侧,旋转关节中的转动端穿过基座并设置在基座另一侧,主动轮机构设置在基座的另一侧,且主动轮机构与旋转关节的转动端固定连接,被动轮机构通过两个张紧机构固接在主动轮机构上,进给带与主动轮机构和被动轮机构传动连接,本发

可分解为单自由度遥操作装置的二自由度虚拟力反馈装置.pdf
本发明公开了可分解为单自由度遥操作装置的二自由度虚拟力反馈装置,4根圆立柱连接面板和底板形成大台架,大力矩电机垂直固联于面板下;装有力和加速度传感器的大单摆臂经第一联轴套固联于大力矩电机转轴上端,该转轴下端接角位移传感器;下接圆立柱的4根短立柱支撑由4根小立柱连接小面板和基座板形成的小台架,小力矩电机安装在位于小台架下方的小面板上,大、小力矩电机的轴心线重合;摩擦传动轮经第三联轴套固联于小力矩电机转轴;类似大单摆臂的小单摆臂的根部固联于垂直安装在大单摆臂端部的传动轮轴上端,传动轮轴与摩擦传动轮由钢丝连接。
面向虚拟手术的力反馈技术研究.pptx
汇报人:CONTENTSPARTONEPARTTWO虚拟手术技术的发展现状力反馈技术在虚拟手术中的重要性研究目的与意义PARTTHREE虚拟手术系统概述力反馈技术原理及实现方式国内外研究现状及发展趋势PARTFOUR研究内容概述研究方法和技术路线实验设计与实施PARTFIVE实验结果展示结果分析与讨论本研究与同类研究的对比分析PARTSIX研究结论总结研究成果的应用与推广对未来研究的展望与建议汇报人: