
一种单自由度力反馈手柄.pdf

一吃****海逸


1/7

2/7
3/7
4/7

5/7

6/7

7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种单自由度力反馈手柄.pdf
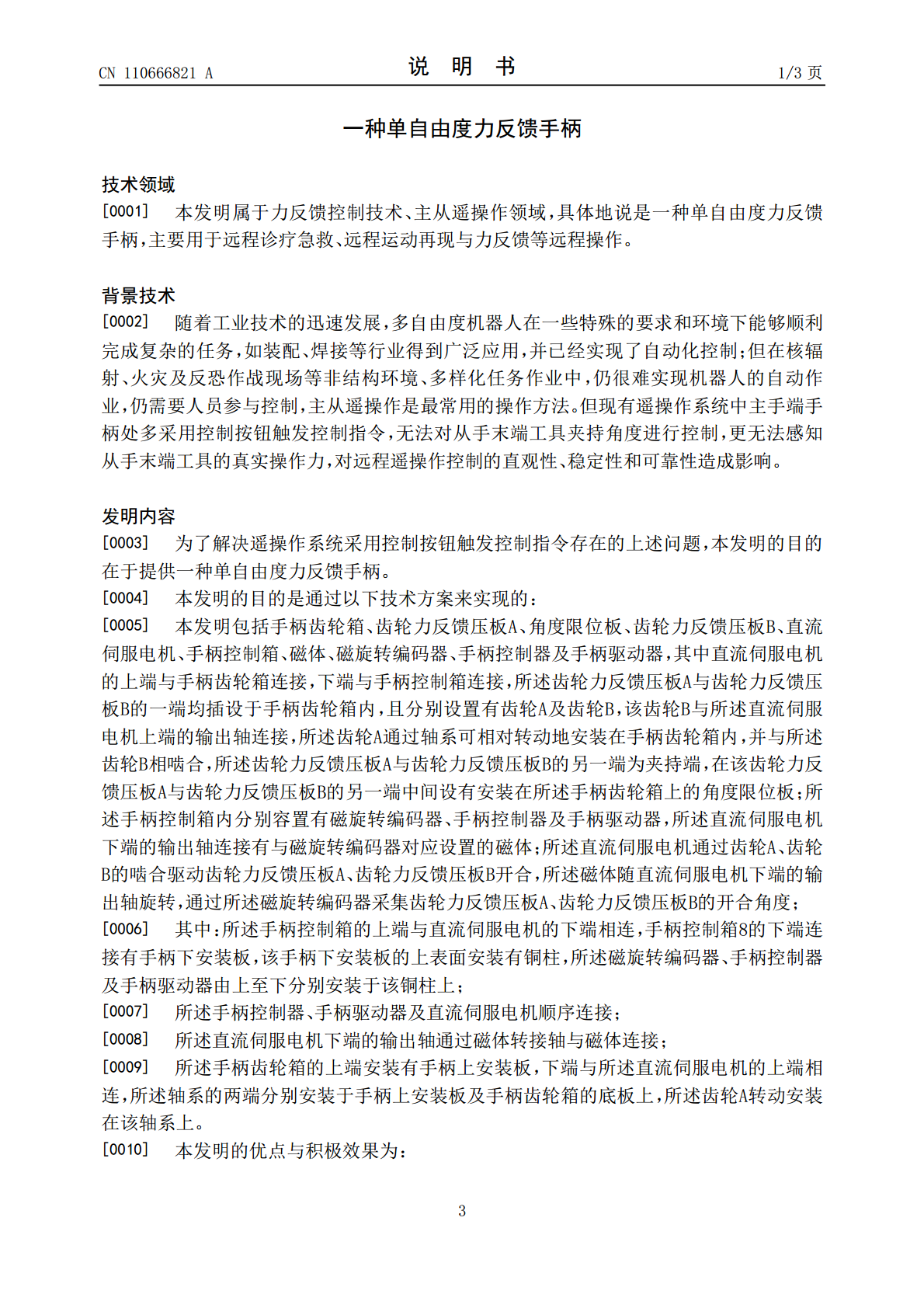
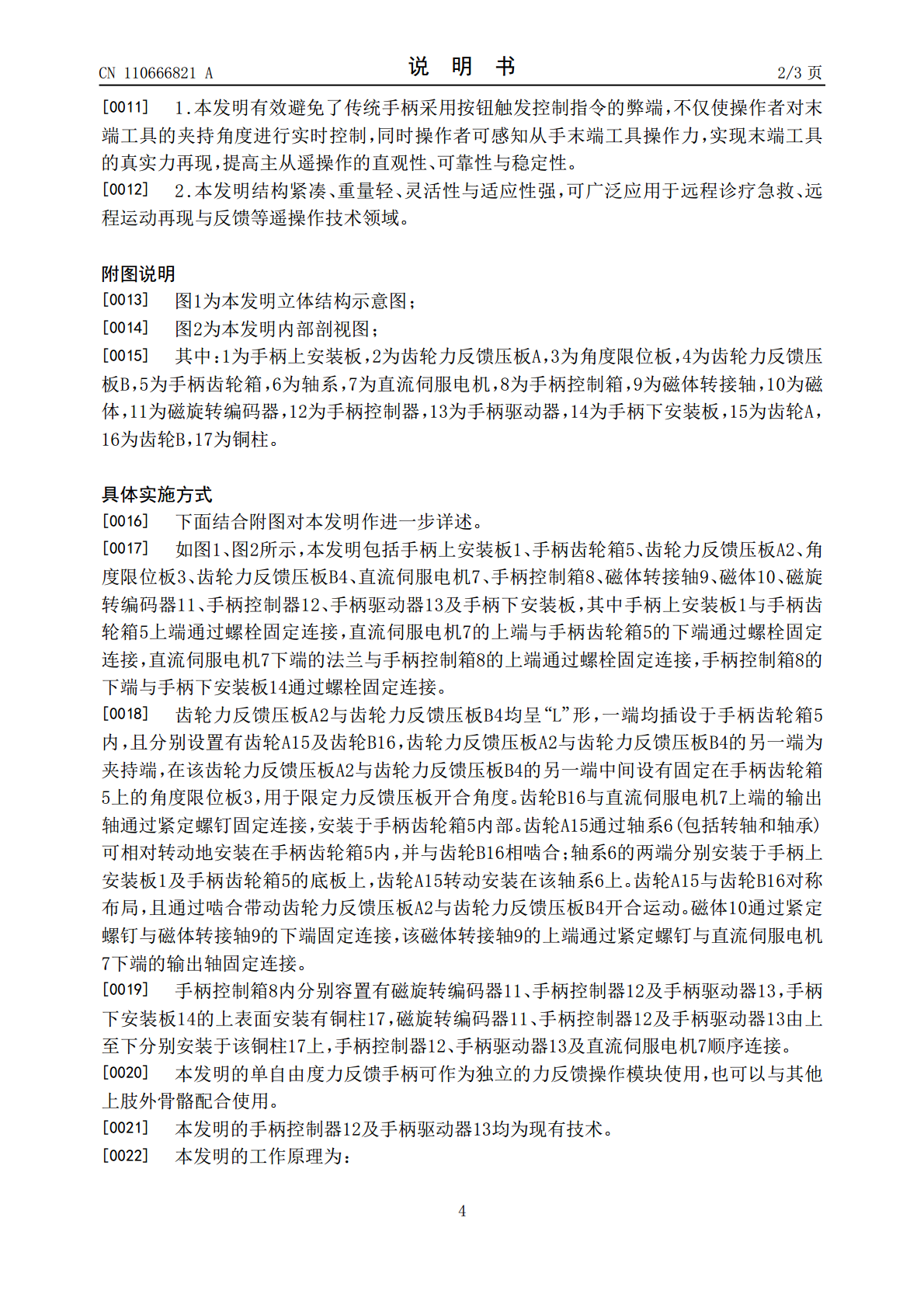
本发明涉及一种单自由度力反馈手柄,直流伺服电机的上端与手柄齿轮箱连接,下端与手柄控制箱连接,齿轮力反馈压板A与齿轮力反馈压板B的一端均插设于手柄齿轮箱内,且分别设置有齿轮A及齿轮B,齿轮B与直流伺服电机上端的输出轴连接,齿轮A通过轴系可相对转动地安装在手柄齿轮箱内,并与齿轮B相啮合,齿轮力反馈压板A与齿轮力反馈压板B的另一端为夹持端,在齿轮力反馈压板A与齿轮力反馈压板B的另一端中间设有安装在手柄齿轮箱上的角度限位板;手柄控制箱内分别容置有磁旋转编码器、手柄控制器及手柄驱动器,直流伺服电机下端的输出轴连接有

并联三自由度力反馈手柄.pdf
本发明公开了一种并联三自由度力反馈手柄,其结构包括底座、定平台、齿轮机构、曲面连杆、平行四边形连杆、动平台、操作手柄和控制电路板;操作手柄固定在动平台中心位置;动平台的三条边通过轴承和三组平行四边形连杆连接;平行四边形连杆通过轴承和轴销与曲面连杆连接;曲面连杆通过转动轴承连接在定平台上,且其转动轴承与齿轮A同轴;齿轮A与套接在电机输出轴的齿轮B向啮合;带有编码器的电机通过安装支架安装在定平台上。本发明用于并联三自由度力反馈手柄,结构简单、解算容易、便于加工。
一种救援机器人的七自由度力反馈手柄及操作方法.pdf
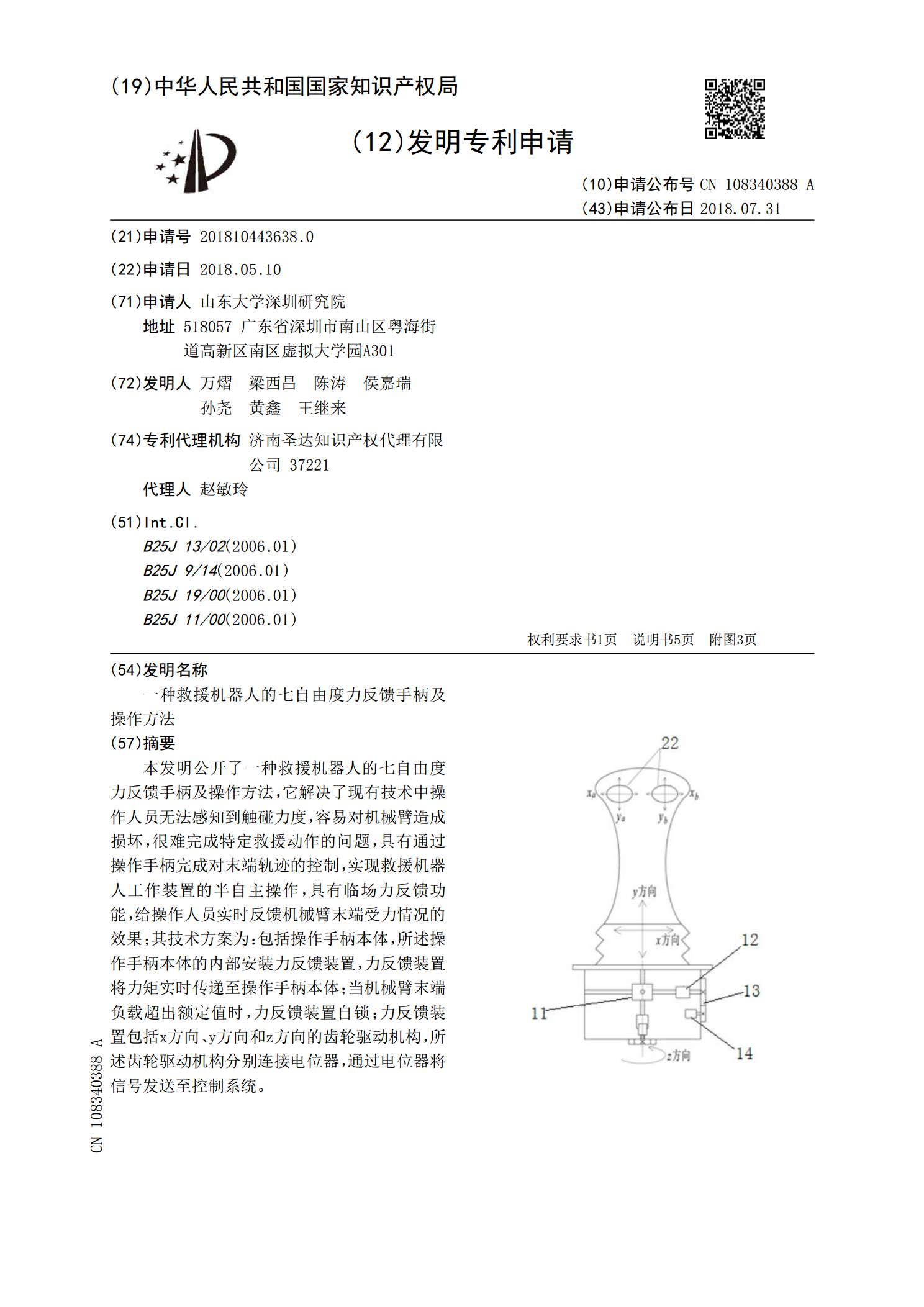
本发明公开了一种救援机器人的七自由度力反馈手柄及操作方法,它解决了现有技术中操作人员无法感知到触碰力度,容易对机械臂造成损坏,很难完成特定救援动作的问题,具有通过操作手柄完成对末端轨迹的控制,实现救援机器人工作装置的半自主操作,具有临场力反馈功能,给操作人员实时反馈机械臂末端受力情况的效果;其技术方案为:包括操作手柄本体,所述操作手柄本体的内部安装力反馈装置,力反馈装置将力矩实时传递至操作手柄本体;当机械臂末端负载超出额定值时,力反馈装置自锁;力反馈装置包括x方向、y方向和z方向的齿轮驱动机构,所述齿轮驱
一种两自由度虚拟手术的力反馈装置.pdf
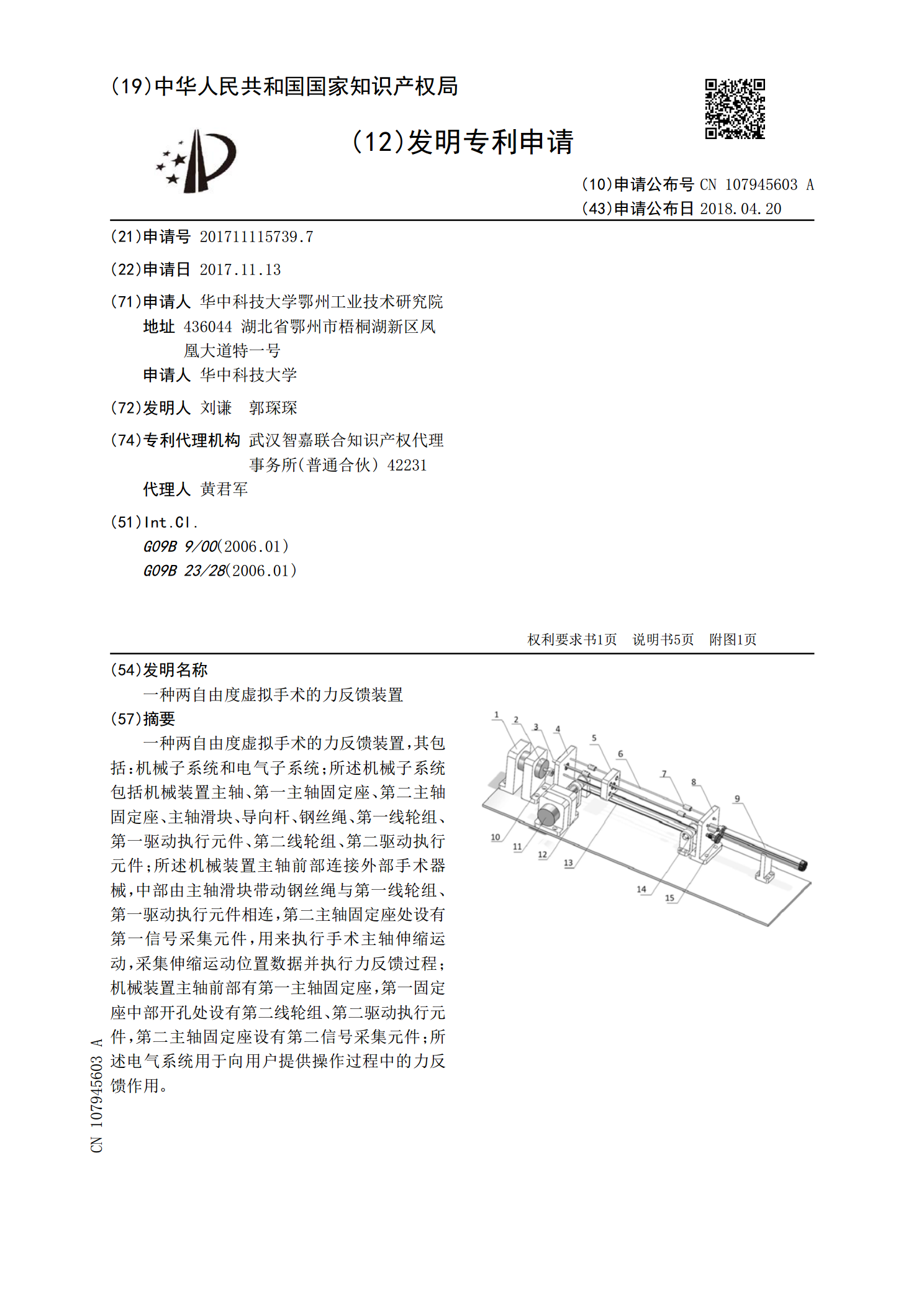
一种两自由度虚拟手术的力反馈装置,其包括:机械子系统和电气子系统;所述机械子系统包括机械装置主轴、第一主轴固定座、第二主轴固定座、主轴滑块、导向杆、钢丝绳、第一线轮组、第一驱动执行元件、第二线轮组、第二驱动执行元件;所述机械装置主轴前部连接外部手术器械,中部由主轴滑块带动钢丝绳与第一线轮组、第一驱动执行元件相连,第二主轴固定座处设有第一信号采集元件,用来执行手术主轴伸缩运动,采集伸缩运动位置数据并执行力反馈过程;机械装置主轴前部有第一主轴固定座,第一固定座中部开孔处设有第二线轮组、第二驱动执行元件,第二主

一种六自由度三维力反馈机构.pdf
本发明涉及一种六自由度三维力反馈机构,包括底座、转台、安装在转台上的平行四连杆机构以及安装在平行四连杆机构末端的末端执行器机构;转台通过转动副连接于底座,第一从动轮以及平行四连杆机构的一根长杆固定安装于转台上的支撑轴,第二从动轮以及平行四连杆机构的近端杆转动安装于转台上的支撑轴,平行四连杆机构的另一根长杆转动连接于的近端杆的另一端;远端杆安装有末端三自由度执行器机构,末端执行器机构由三个轴线依次垂直布置的转动副连接构成。本发明采集手腕的位置和姿态六自由度信息,并能够在三个移动自由度方向施加力反馈;本发明采