
一种机械式全密封远程驱动装置.pdf

一只****写意


1/6
2/6

3/6

4/6
5/6
6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种机械式全密封远程驱动装置.pdf
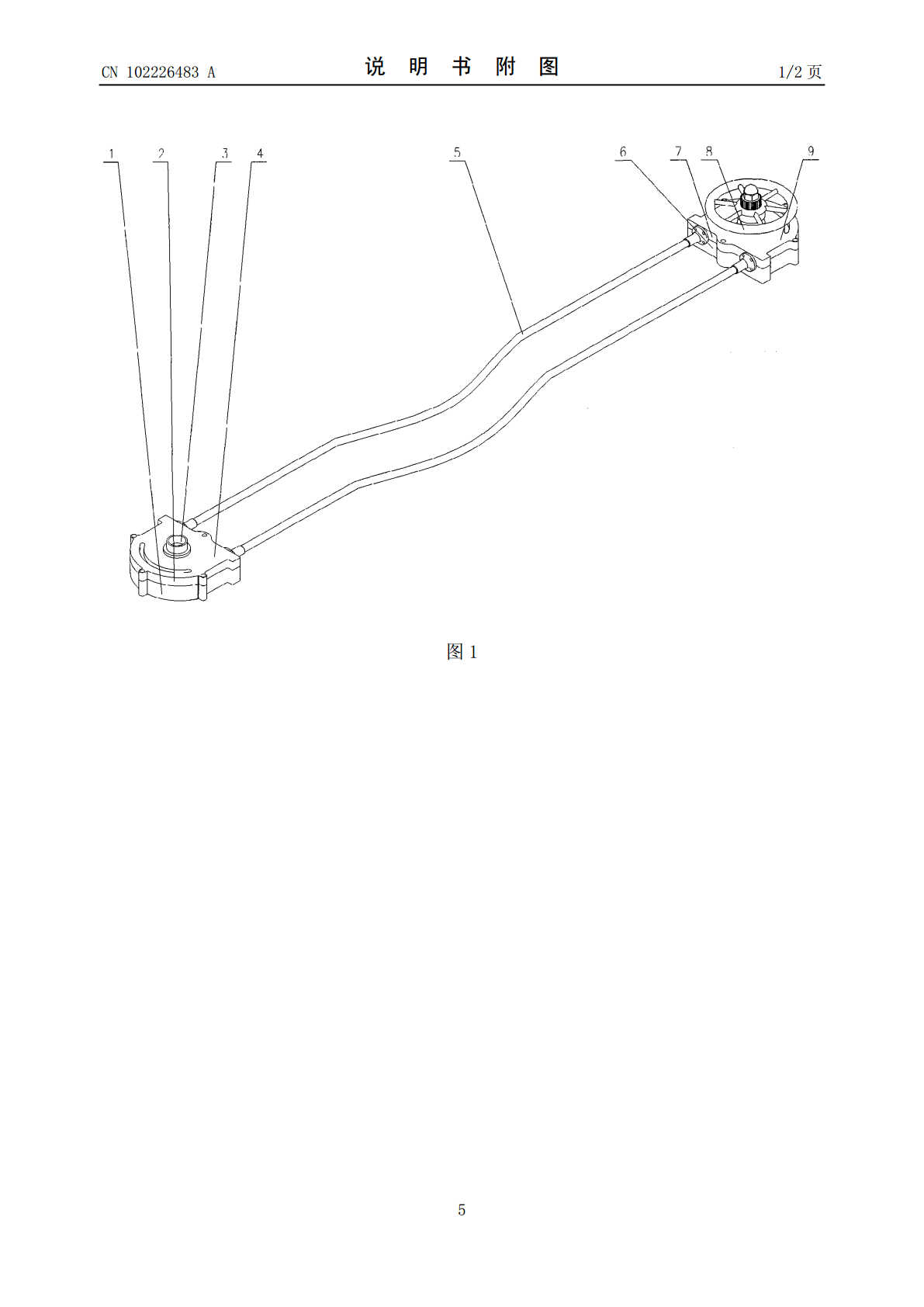
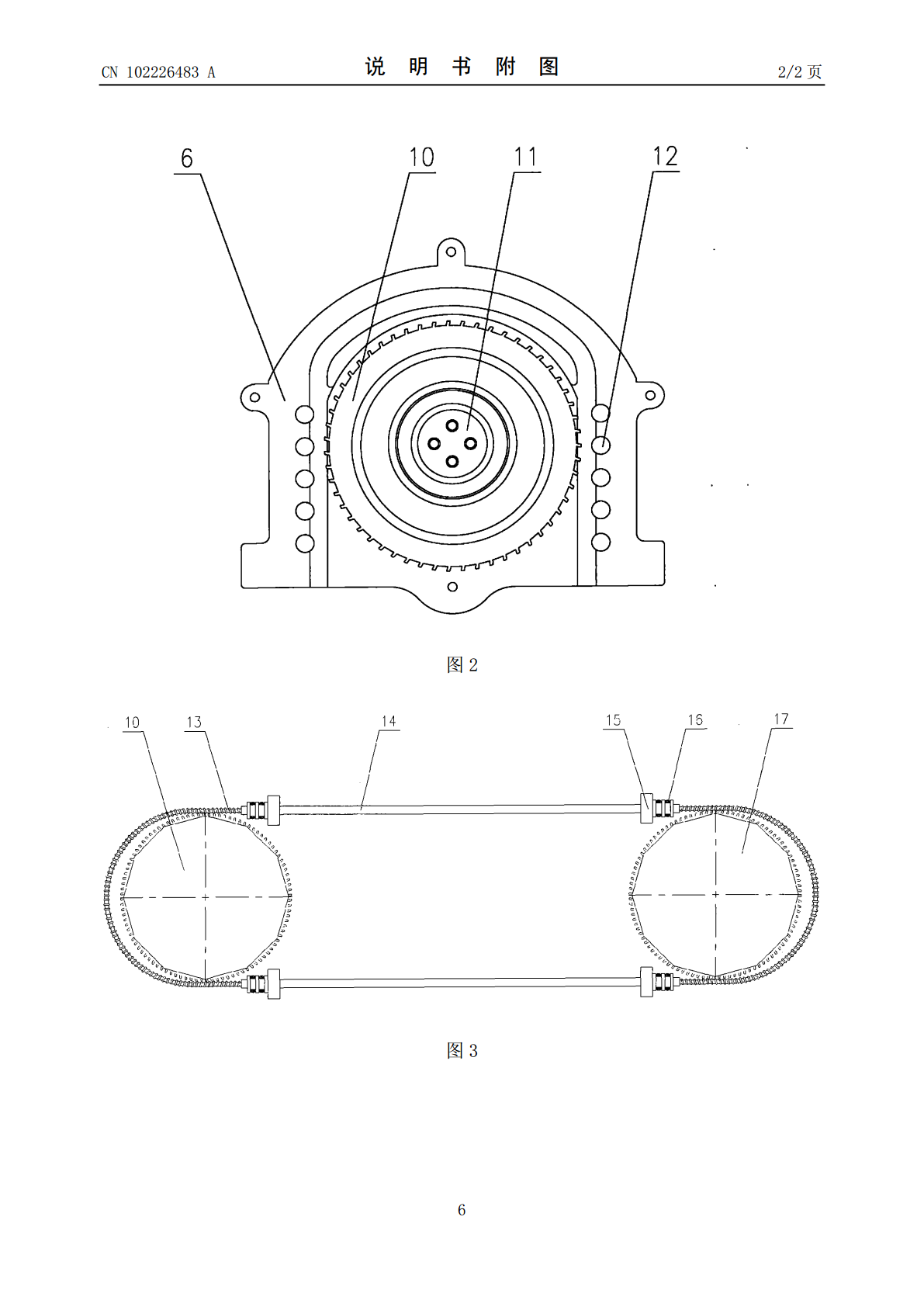
本发明提出一种机械式全密封远程驱动装置,包括驱动机构、柔性推拉软轴和执行机构。操作人员通过转动驱动机构将驱动力沿柔性推拉软轴传递至远端执行机构,实现远距离驱动。本发明的优点在于整个装置密封,可直接置于水下使用,装置内部注入润滑油(脂),可终身免润滑、免维护。装置通过主、从动轮与螺纹软轴啮合(类似于齿轮与齿条啮合)的方式传递力矩,主动轮可顺、逆时针方向转动,由于螺纹软轴为闭合环形,本发明主动轮转动不受旋转圈数的限制,可无限循环的传递力矩。另外,驱动与执行机构内置有减摩轴承阵列,加上螺纹软轴在运行中只与主、从
一种机械式可变气门驱动装置.pdf
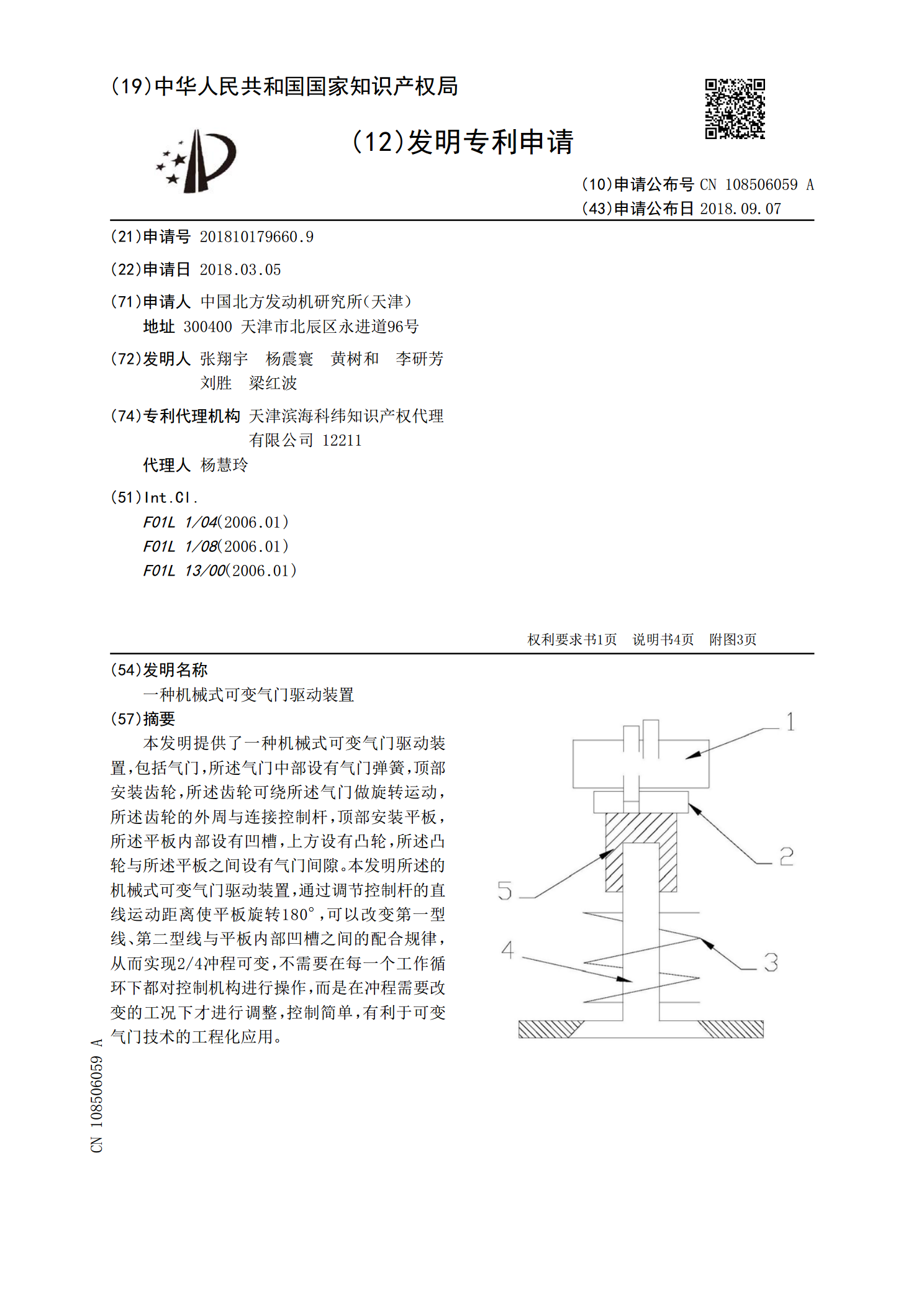
本发明提供了一种机械式可变气门驱动装置,包括气门,所述气门中部设有气门弹簧,顶部安装齿轮,所述齿轮可绕所述气门做旋转运动,所述齿轮的外周与连接控制杆,顶部安装平板,所述平板内部设有凹槽,上方设有凸轮,所述凸轮与所述平板之间设有气门间隙。本发明所述的机械式可变气门驱动装置,通过调节控制杆的直线运动距离使平板旋转180°,可以改变第一型线、第二型线与平板内部凹槽之间的配合规律,从而实现2/4冲程可变,不需要在每一个工作循环下都对控制机构进行操作,而是在冲程需要改变的工况下才进行调整,控制简单,有利于可变气门技
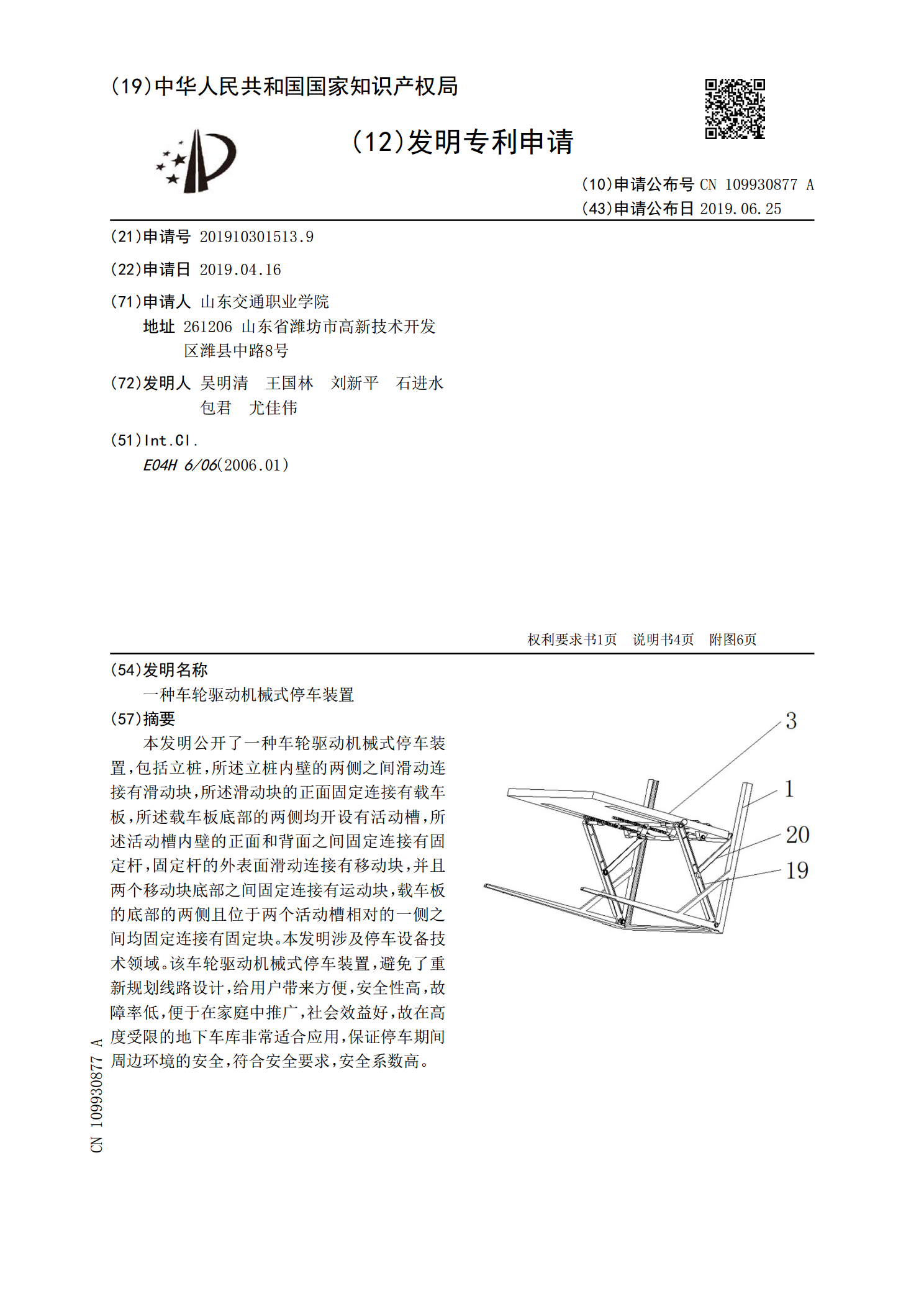
一种车轮驱动机械式停车装置.pdf
本发明公开了一种车轮驱动机械式停车装置,包括立桩,所述立桩内壁的两侧之间滑动连接有滑动块,所述滑动块的正面固定连接有载车板,所述载车板底部的两侧均开设有活动槽,所述活动槽内壁的正面和背面之间固定连接有固定杆,固定杆的外表面滑动连接有移动块,并且两个移动块底部之间固定连接有运动块,载车板的底部的两侧且位于两个活动槽相对的一侧之间均固定连接有固定块。本发明涉及停车设备技术领域。该车轮驱动机械式停车装置,避免了重新规划线路设计,给用户带来方便,安全性高,故障率低,便于在家庭中推广,社会效益好,故在高度受限的地下
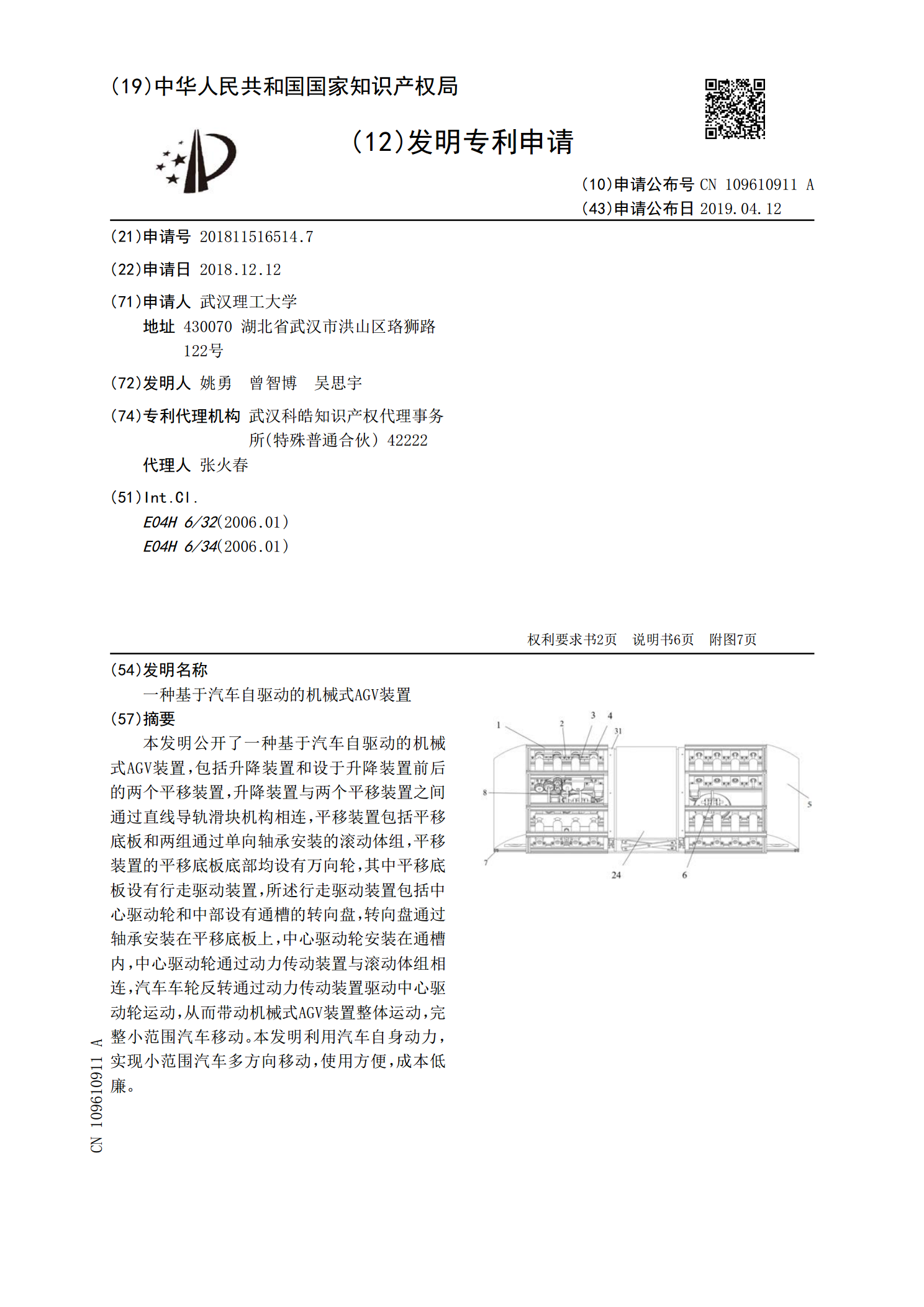
一种基于汽车自驱动的机械式AGV装置.pdf
本发明公开了一种基于汽车自驱动的机械式AGV装置,包括升降装置和设于升降装置前后的两个平移装置,升降装置与两个平移装置之间通过直线导轨滑块机构相连,平移装置包括平移底板和两组通过单向轴承安装的滚动体组,平移装置的平移底板底部均设有万向轮,其中平移底板设有行走驱动装置,所述行走驱动装置包括中心驱动轮和中部设有通槽的转向盘,转向盘通过轴承安装在平移底板上,中心驱动轮安装在通槽内,中心驱动轮通过动力传动装置与滚动体组相连,汽车车轮反转通过动力传动装置驱动中心驱动轮运动,从而带动机械式AGV装置整体运动,完整小范

升降驱动装置及具备该升降驱动装置的机械式停车设备.pdf
本发明提供一种升降驱动装置及具备该升降驱动装置的机械式停车设备,该升降驱动装置即使增加在曳引轮上的缆绳的卷绕次数,也不会使施加于轴承的反作用力增加,该升降驱动装置包括:在曳引轮(30)的缆绳张力作用方向(P)上,与该曳引轮(30)对向配置的折向滑轮(40);基部(53)自由旋转地支持在驱动源(25)的输出轴(26)上、前端部(54)自由旋转地支持所述折向滑轮(40)的支持构件(50);以及保持该支持构件(50)和驱动源(25)之间的相对位置关系的阻止旋转构件(57);缆绳(21)卷绕于曳引轮(30)后,卷