
双驱动主动式车轮.pdf

一吃****仪凡


1/8

2/8

3/8

4/8

5/8

6/8

7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

双驱动主动式车轮.pdf
本发明的目的在于提供双驱动主动式车轮,包括轮毂、两个伺服电机、行星架、太阳齿轮、行星齿轮、、内齿轮、车载电池、伺服电机控制器,内齿轮固定在轮毂上,太阳齿轮与第一伺服电机固定连接,行星架与第二伺服电机固定连接,行星齿轮安装在行星架上,太阳齿轮、内齿轮、行星齿轮相互啮合,车载电池和伺服电机控制器均与第一伺服电机和第二伺服电机相连。本发明传动效率较高,具有制动能量回馈能力,节能环保。
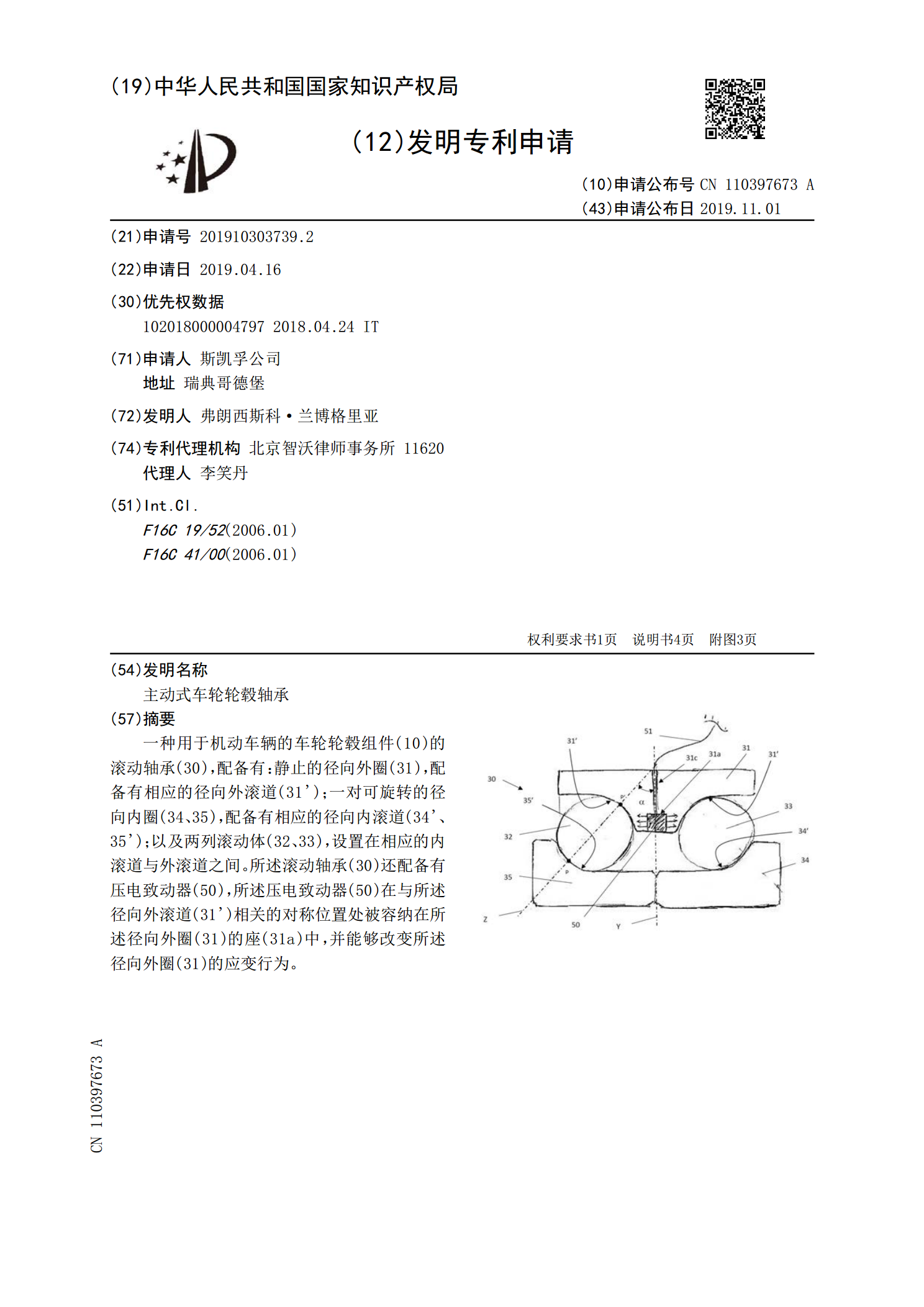
主动式车轮轮毂轴承.pdf
一种用于机动车辆的车轮轮毂组件(10)的滚动轴承(30),配备有:静止的径向外圈(31),配备有相应的径向外滚道(31’);一对可旋转的径向内圈(34、35),配备有相应的径向内滚道(34’、35’);以及两列滚动体(32、33),设置在相应的内滚道与外滚道之间。所述滚动轴承(30)还配备有压电致动器(50),所述压电致动器(50)在与所述径向外滚道(31’)相关的对称位置处被容纳在所述径向外圈(31)的座(31a)中,并能够改变所述径向外圈(31)的应变行为。

车轮驱动式撒肥机.pdf
本发明涉及一种车轮驱动式撒肥机,通过控制拖拉机的液压管制从车轮传递到网链输送机的旋转力,同时附加各种功能来更加容易且方便地撒播堆肥等肥料。为此,本发明的车轮驱动式撒肥机,包括:主体框架,具备车轮及连接装置,从拖拉机接收牵引力行驶;料斗,设置于所述主体框架的上部,可装载肥料,在料斗的底部一侧形成有排放口及闸板,在料斗的底面具备网链输送机,所述网链输送机将装载的肥料移送至排放口;动力传递装置,具备可转动地支撑于所述主体框架的传动轮,将从选择性地接触于所述车轮的传动轮输入的旋转力传递至所述网链输送机来驱动网链输
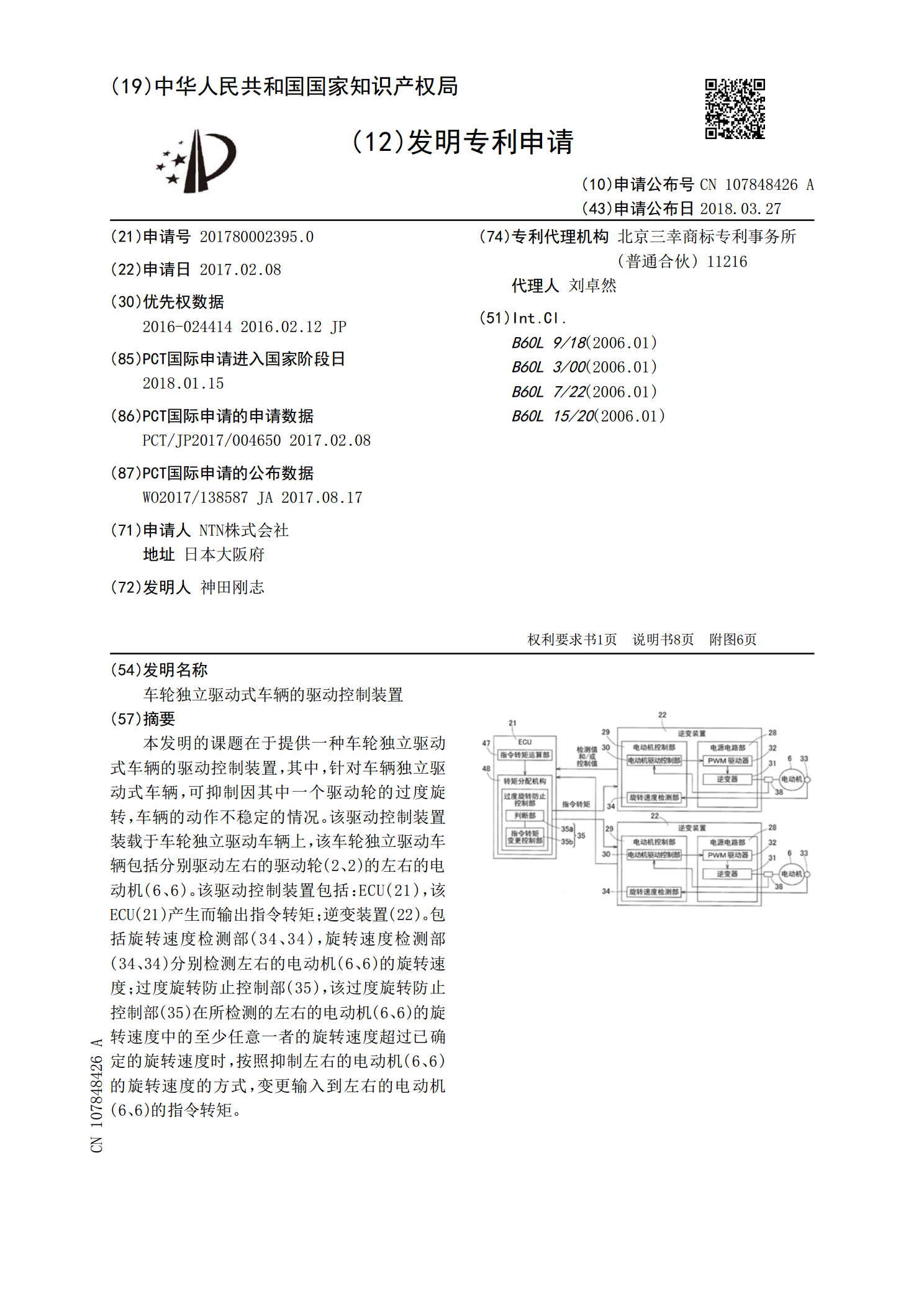
车轮独立驱动式车辆的驱动控制装置.pdf
本发明的课题在于提供一种车轮独立驱动式车辆的驱动控制装置,其中,针对车辆独立驱动式车辆,可抑制因其中一个驱动轮的过度旋转,车辆的动作不稳定的情况。该驱动控制装置装载于车轮独立驱动车辆上,该车轮独立驱动车辆包括分别驱动左右的驱动轮(2、2)的左右的电动机(6、6)。该驱动控制装置包括:ECU(21),该ECU(21)产生而输出指令转矩;逆变装置(22)。包括旋转速度检测部(34、34),旋转速度检测部(34、34)分别检测左右的电动机(6、6)的旋转速度;过度旋转防止控制部(35),该过度旋转防止控制部(3
遥控式自驱动电动车轮.pdf
本发明属于电动车辆技术领域,涉及一种一体化的遥控式、自驱动电动车轮。具体是将电动车轮系统上的主要部件,即轮毂电机、电池、控制器、充电设备等,全部设置在一个车轮内,外部仅设置有遥控器,用于遥控电动车轮的运动。由于采用了一体化的紧凑形结构,使得遥控式自驱动电动车轮可以成为一个通用的标准件,简化了载体的结构、减少了故障率、降低了成本。