
架空线路跨越式机器人行走装置.pdf

运升****魔王

1/10

2/10

3/10

4/10
5/10
6/10
7/10
8/10

9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

架空线路跨越式机器人行走装置.pdf
本发明公开了一种架空线路跨越式机器人行走装置,包括壳体,壳体内开设内腔,内腔上安装四根第一缓冲杆,第一缓冲杆上安装行走电机,行走电机上安装行走槽轮;内腔内安装两个跨越障碍支架,跨越障碍支架包括U形支座,U形支座通过转轴与两根连杆连接,两连杆与支撑座铰接,支撑座上安装第二缓冲杆,第二缓冲杆上安装跨越辊支架,跨越辊支架上安装跨越辊;内腔内安装控制箱和第一电机,第一电机上安装第一链轮和第二齿轮,左侧跨越障碍支架的转轴的上安装第二链轮,第二链轮与第一链轮通过第一链条连接;第三齿轮与第二齿轮啮合,第三齿轮轴上安装第
一种用于架空输电线路巡检机器人的行走轮被动闭锁装置.pdf
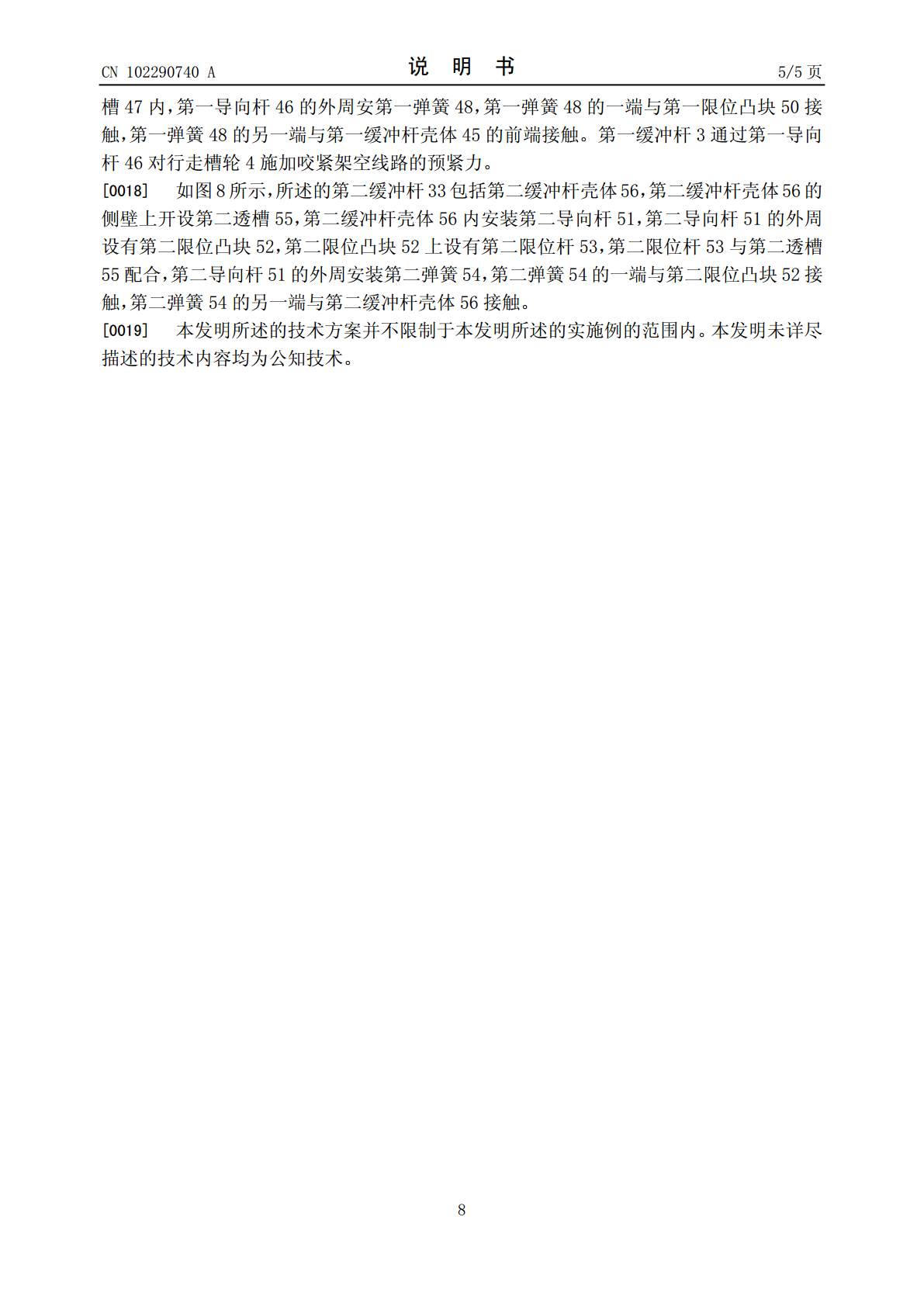
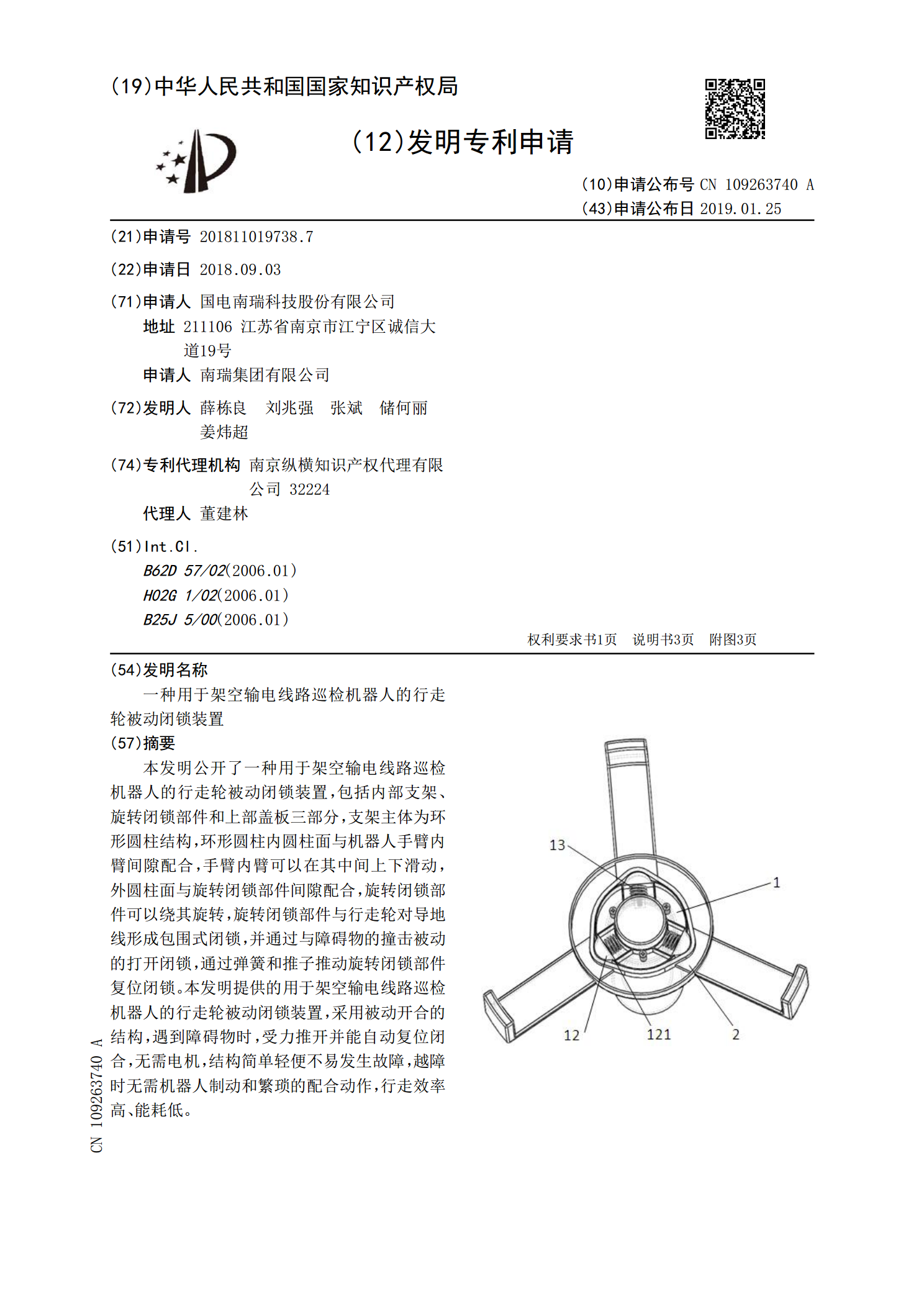
本发明公开了一种用于架空输电线路巡检机器人的行走轮被动闭锁装置,包括内部支架、旋转闭锁部件和上部盖板三部分,支架主体为环形圆柱结构,环形圆柱内圆柱面与机器人手臂内臂间隙配合,手臂内臂可以在其中间上下滑动,外圆柱面与旋转闭锁部件间隙配合,旋转闭锁部件可以绕其旋转,旋转闭锁部件与行走轮对导地线形成包围式闭锁,并通过与障碍物的撞击被动的打开闭锁,通过弹簧和推子推动旋转闭锁部件复位闭锁。本发明提供的用于架空输电线路巡检机器人的行走轮被动闭锁装置,采用被动开合的结构,遇到障碍物时,受力推开并能自动复位闭合,无需电机

架空电缆行走装置.pdf
本发明公开了一种架空电缆行走装置,涉及变电站技术领域。包括挂线外壳;挂线外壳的内部上方轴连接有均匀分布的呈哑铃状的压轮;挂线外壳的内部的下端设置有蜗杆升降台;蜗杆升降台上方连接有橡胶履带底盘;橡胶履带底盘内安装有滚轮驱动的橡胶履带;挂线外壳的下端安装有连接旋转装置;连接旋转装置的下端通过至少四个连接杆连接有吊篮;吊篮的一侧设置有开口;吊篮的下端开口一侧连接有动力支架;动力支架末端开有通孔;通孔内配合有转轴;转轴的两侧各安装有一个曲柄;曲柄端部轴连接有脚踏板;转轴的一侧联动有软轴;软轴的另一端与橡胶履带底盘

机器人行走装置.pdf
一种机器人行走装置,具有腰部主架、两髋部扭转支架、两髋部偏摆支架、大腿支架、小腿支架;两髋部扭转支架分别固定在腰部主架底面,且各能作绕上下向轴线的转动,两髋部偏摆支架分别铰接在两髋部扭转支架的下部且各能作绕前后向轴线的转动;两大腿支架的上端各与两髋部偏摆支架的前侧铰接,两大腿支架的下端各与一所述小腿支架的上端后侧铰接,每髋部偏摆支架的后侧与大腿支架的下部之间铰接有髋关节俯仰电动推杆,每髋部偏摆支架的前侧与小腿支架的上端前侧之间铰接有膝关节俯仰电动推杆;所述脚部总成具有主动轮组件和步行组件。本发明结构简单、
行走装置及机器人.pdf
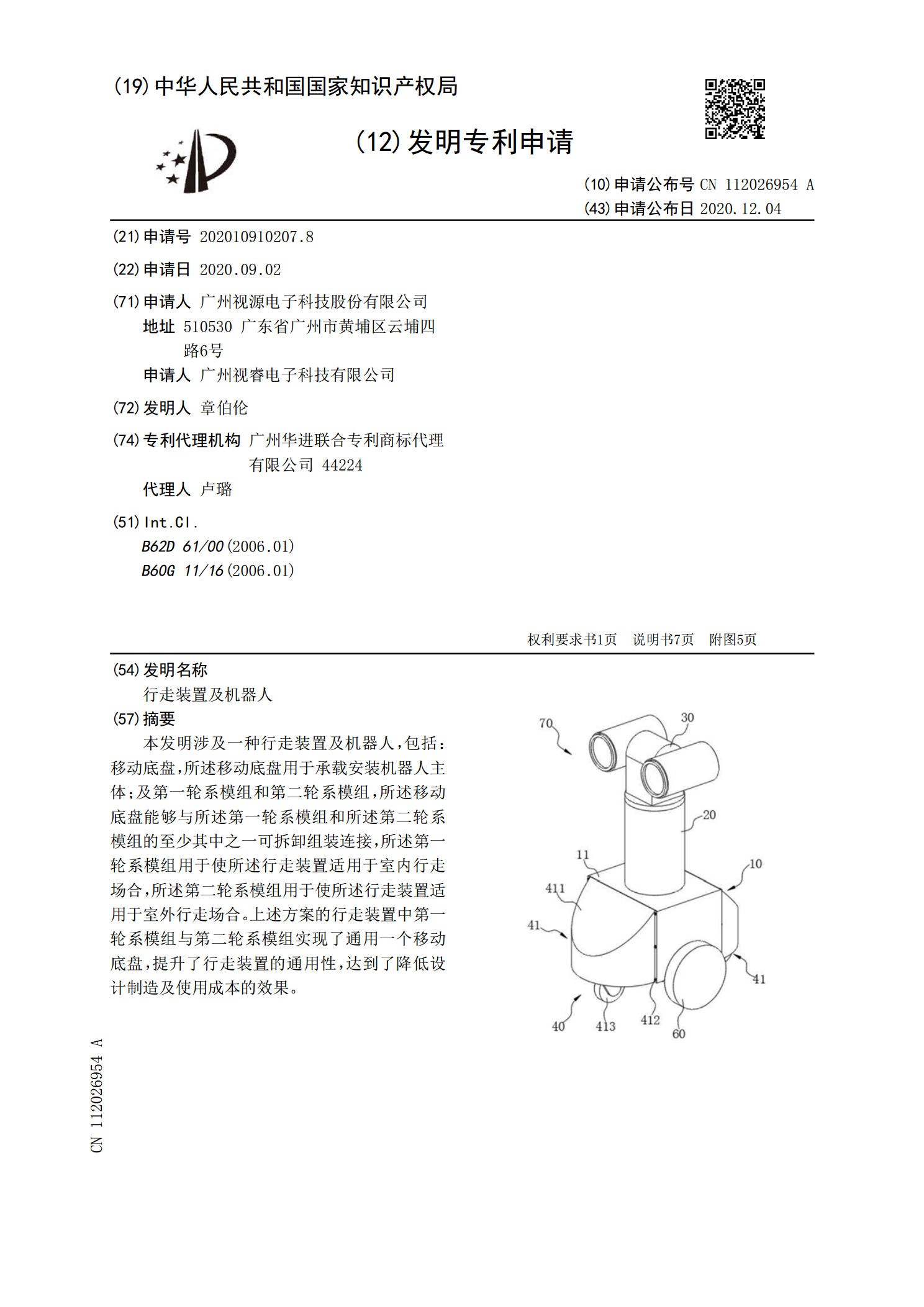
本发明涉及一种行走装置及机器人,包括:移动底盘,所述移动底盘用于承载安装机器人主体;及第一轮系模组和第二轮系模组,所述移动底盘能够与所述第一轮系模组和所述第二轮系模组的至少其中之一可拆卸组装连接,所述第一轮系模组用于使所述行走装置适用于室内行走场合,所述第二轮系模组用于使所述行走装置适用于室外行走场合。上述方案的行走装置中第一轮系模组与第二轮系模组实现了通用一个移动底盘,提升了行走装置的通用性,达到了降低设计制造及使用成本的效果。