
双驱旋转搅拌埋弧堆焊传感器.pdf

子璇****君淑

1/9
2/9
3/9

4/9

5/9
6/9
7/9
8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

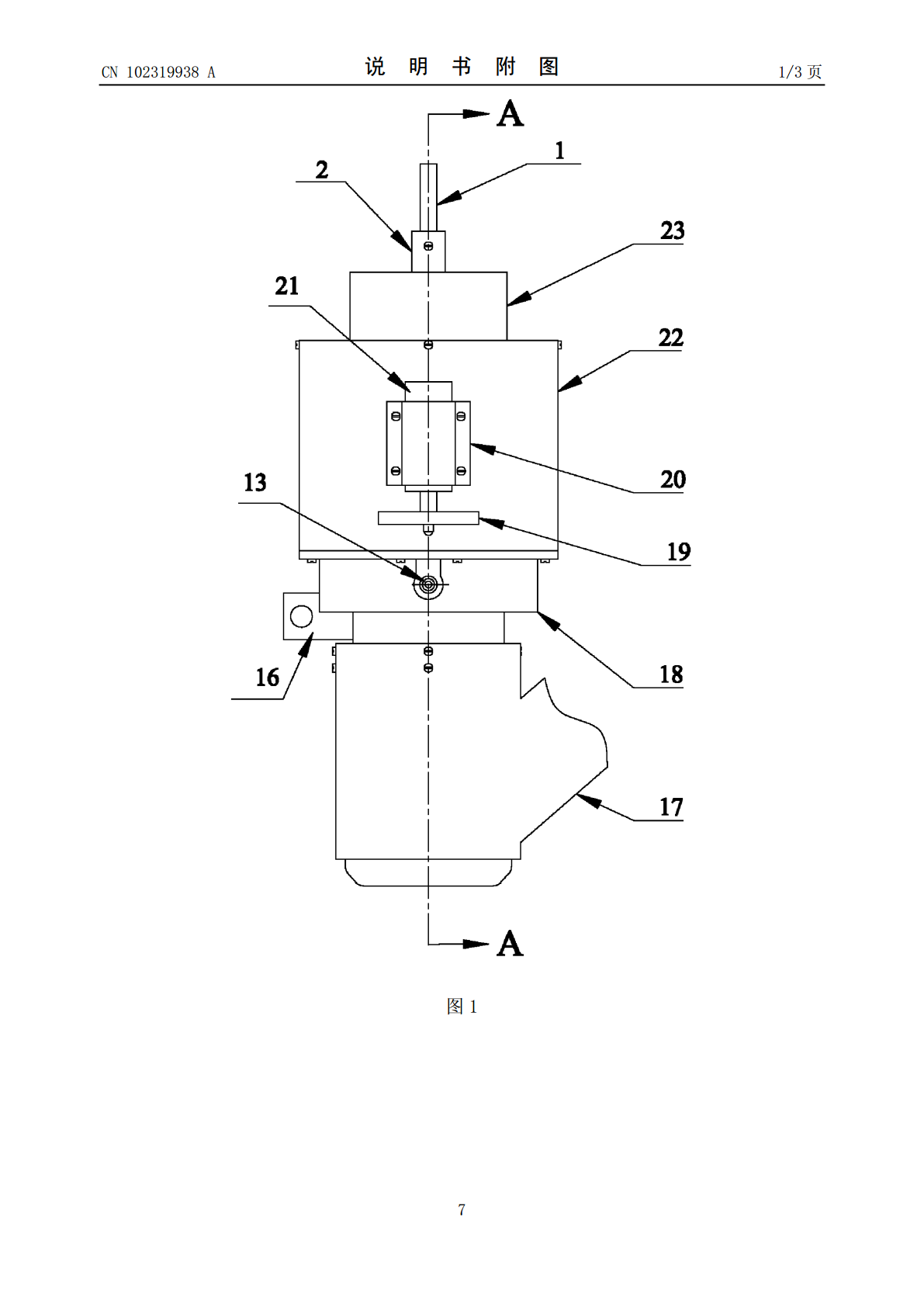
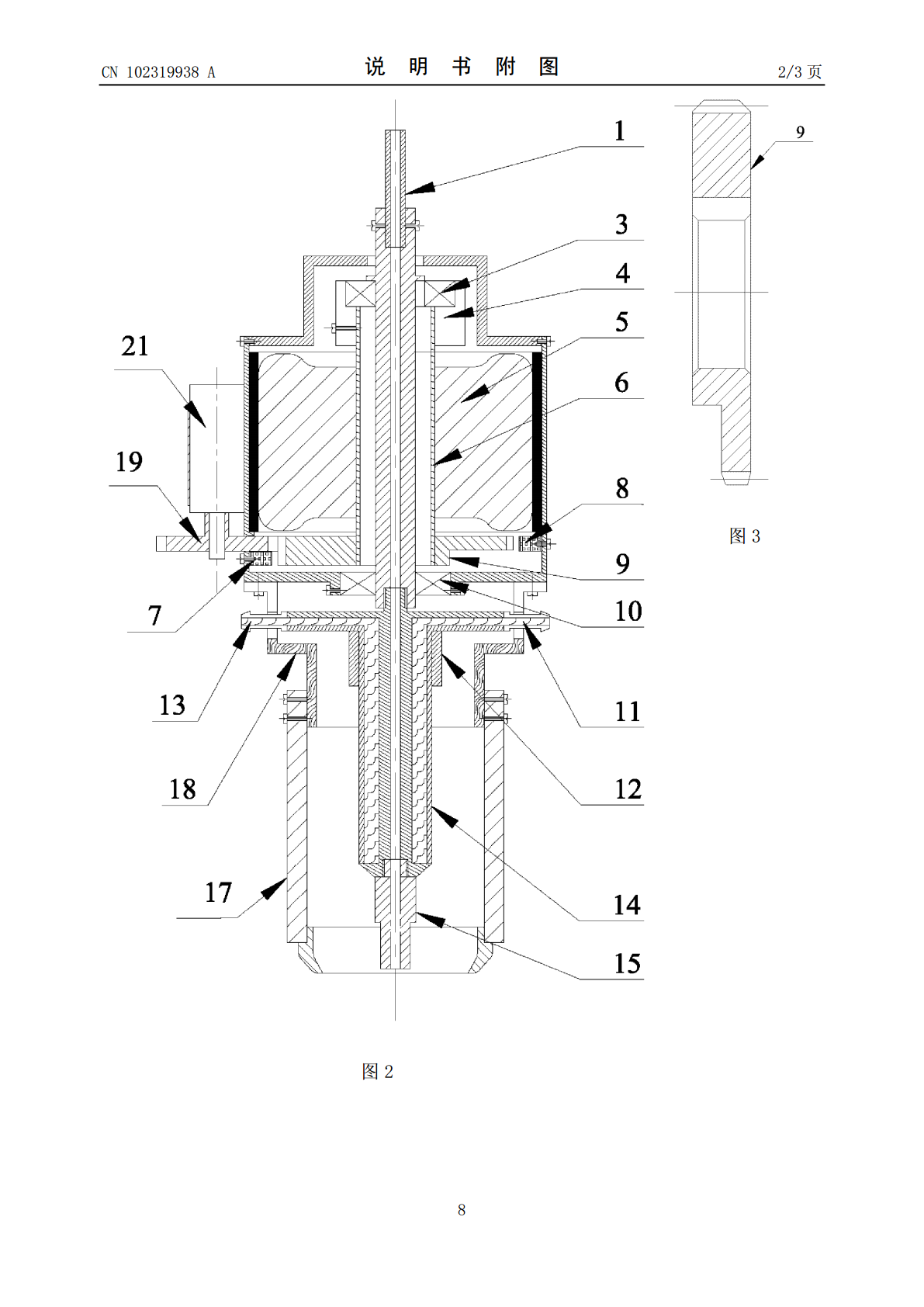
双驱旋转搅拌埋弧堆焊传感器.pdf
本发明公开了一种双驱旋转搅拌埋弧堆焊传感器,属于焊接辅助装置领域,该传感器包括壳体、驱动杆、冷却装置等。所述壳体内部装有主电机,主电机带动偏心滑块旋转,壳体外部安装有辅助电机,辅助电机通过齿轮驱动偏心滑块旋转;驱动杆下端与连接有冷却装置的接头固联;冷却装置的中部设有与埋弧焊机的电极相连的导电铜块,端部与导电嘴相连。焊丝分别穿过驱动杆、冷却装置以及导电嘴,并与导电嘴底部形成导电动配合。两电机共同转时,壳体底部的调心球轴承与顶部的偏心平台形成圆锥旋转,圆锥的顶点处于壳体的底部。本发明不仅提高了埋弧堆焊的熔覆金
一种双带极埋弧堆焊方法.pdf
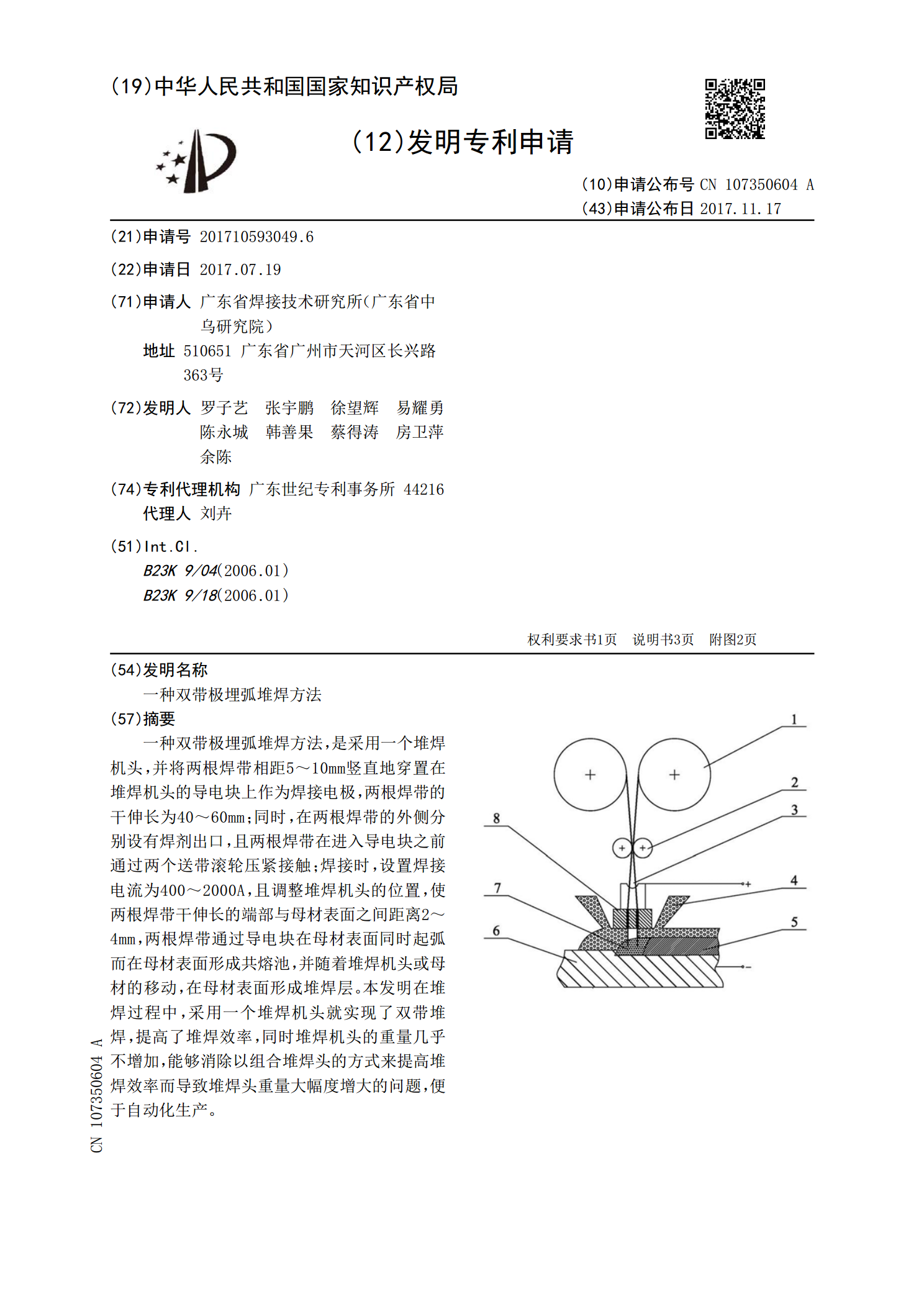
一种双带极埋弧堆焊方法,是采用一个堆焊机头,并将两根焊带相距5~10mm竖直地穿置在堆焊机头的导电块上作为焊接电极,两根焊带的干伸长为40~60mm;同时,在两根焊带的外侧分别设有焊剂出口,且两根焊带在进入导电块之前通过两个送带滚轮压紧接触;焊接时,设置焊接电流为400~2000A,且调整堆焊机头的位置,使两根焊带干伸长的端部与母材表面之间距离2~4mm,两根焊带通过导电块在母材表面同时起弧而在母材表面形成共熔池,并随着堆焊机头或母材的移动,在母材表面形成堆焊层。本发明在堆焊过程中,采用一个堆焊机头就实现

双丝埋弧焊接机焊枪旋转机构.pdf
本发明涉及双丝埋弧焊接机焊枪旋转机构,包括操作箱支架、驱动电机、支架、回转支承、回转体、平台和电机安装板,所述回转体上端固定在平台底部,所述回转体下端穿过平移小车后与用于装载焊枪的支架连接,所述回转支承设置在平移小车与支架之间,回转支承的内圈与支架连接固定,回转支承的外齿圈与平移小车连接固定;所述驱动电机通过电机安装板安装在支架上,驱动电机的输出轴上通过挡圈安装有齿轮,该齿轮与回转支承的外齿圈啮合传动;所述操作箱支架安装在支架上,操作箱支架上安装有操作箱。本发明结构简单、紧凑、合理,操作方便、快捷、定位准

电镀曲轴再生新技术及埋弧堆焊专业设备.doc
曲轴再生新技术及埋弧堆焊专业设备●王建安(本钢歪头山铁矿)●王英杰(沈阳绿岛表面技术开发中心)【摘要】:超弱规范埋弧自动焊是再生曲轴十分有效的新技术,本文介绍了此技术与传统方法的主要区别、特点、专用设备及实际应用的效果。本文摘自1995年《冶金设备》第二期主题词曲轴再生埋弧焊设备Newtechniqueoftherenewingcrankshaftandspecialequipmentinsubmerged—arcweldingWangJianan(BengangWaitoushanmine)WangYi
双丝双弧埋弧焊的送丝检测系统.pdf
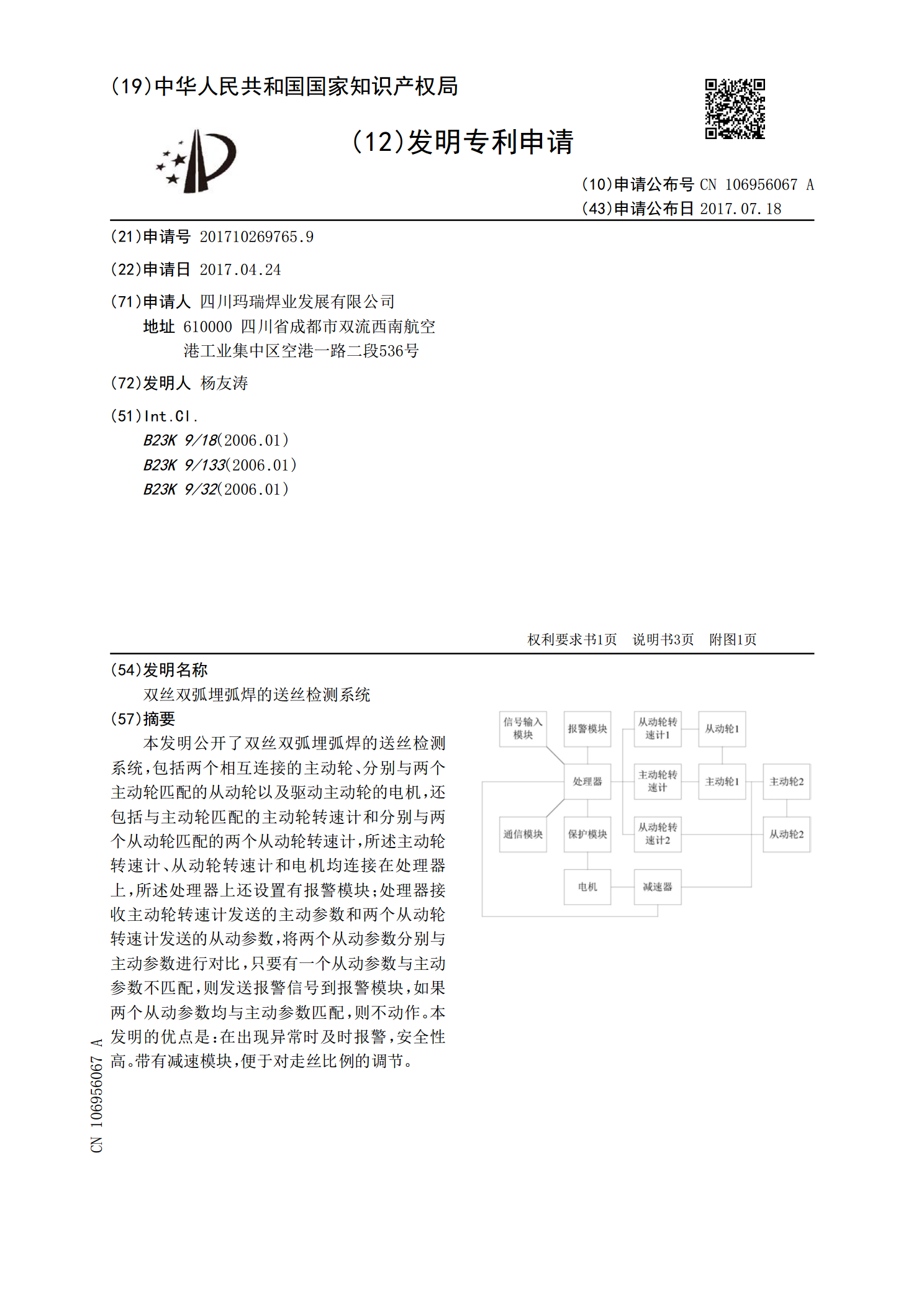
本发明公开了双丝双弧埋弧焊的送丝检测系统,包括两个相互连接的主动轮、分别与两个主动轮匹配的从动轮以及驱动主动轮的电机,还包括与主动轮匹配的主动轮转速计和分别与两个从动轮匹配的两个从动轮转速计,所述主动轮转速计、从动轮转速计和电机均连接在处理器上,所述处理器上还设置有报警模块;处理器接收主动轮转速计发送的主动参数和两个从动轮转速计发送的从动参数,将两个从动参数分别与主动参数进行对比,只要有一个从动参数与主动参数不匹配,则发送报警信号到报警模块,如果两个从动参数均与主动参数匹配,则不动作。本发明的优点是:在出