
用于风力机的偏航系统.pdf

雨巷****碧易


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

用于风力机的偏航系统.pdf
本发明涉及一种用于风力机(1)的偏航系统(5),风力机包括塔架(2)和机舱(3),塔架和机舱由偏航系统联结,并且偏航系统进一步包括:固定到塔架上的轴承,机舱安置在该轴承上且在偏航运动中在该轴承上滑动;以及布置成允许机舱沿着轴承进行旋转运动的至少一个偏航马达,其中,偏航系统(5)进一步包括用于以这样的方式持续地运行该至少一个偏航马达的控制机构(8):使得偏航马达争取根据设定点来操纵机舱。本发明还涉及一种用于控制风力机(1)的偏航的方法,包括以下步骤:确定风力机(1)的设定点,基于风力机的设定点和当前对准情况

一种用于风电偏航系统的阻尼装置及风电偏航系统.pdf
一种用于风电偏航系统的阻尼装置,阻尼装置包括:能够锁定风电偏航系统的机舱底座位置的钳式制动器,设置在机舱底座上。设置在风电偏航系统的塔筒上的刹车盘。能够在风电偏航系统发生对风偏转时,和刹车盘发生相对运动从而在刹车盘中产生阻止机舱底座对风偏转的阻尼力的永磁阻尼器,永磁阻尼器对应刹车盘设置。第二方面,本发明还提供一种风电偏航系统。其有益效果是,当机舱底座不偏航时,永磁阻尼器、刹车盘和钳式制动器同时工作,永磁阻尼器和刹车盘用于降低机舱底座对风偏转的速度,钳式制动器用于锁定机舱底座的位置。当机舱底座偏航时,钳式制
用于风力发电机组的偏航系统.pdf
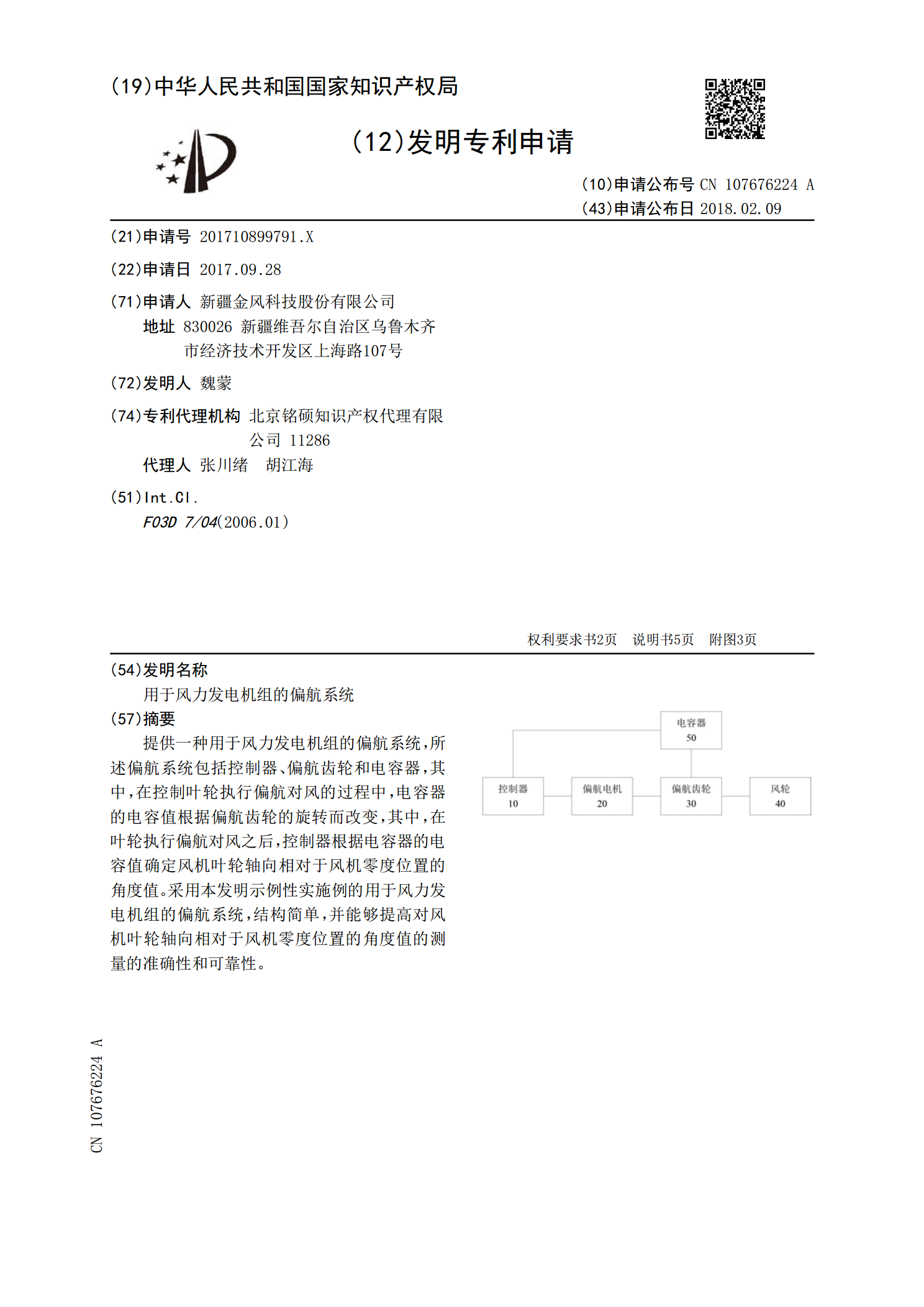
提供一种用于风力发电机组的偏航系统,所述偏航系统包括控制器、偏航齿轮和电容器,其中,在控制叶轮执行偏航对风的过程中,电容器的电容值根据偏航齿轮的旋转而改变,其中,在叶轮执行偏航对风之后,控制器根据电容器的电容值确定风机叶轮轴向相对于风机零度位置的角度值。采用本发明示例性实施例的用于风力发电机组的偏航系统,结构简单,并能够提高对风机叶轮轴向相对于风机零度位置的角度值的测量的准确性和可靠性。

用于测试风力涡轮机的偏航系统的方法和系统.pdf
提供一种用于在架设风力涡轮机(1)之前地面测试机舱(3)的偏航系统的系统和方法。便携式变压器箱(10)被提供,其将允许机舱准备组在架设之前在机舱被放在地上时操作偏航和液压系统。
用于车辆的增强偏航响应的方法和系统.pdf
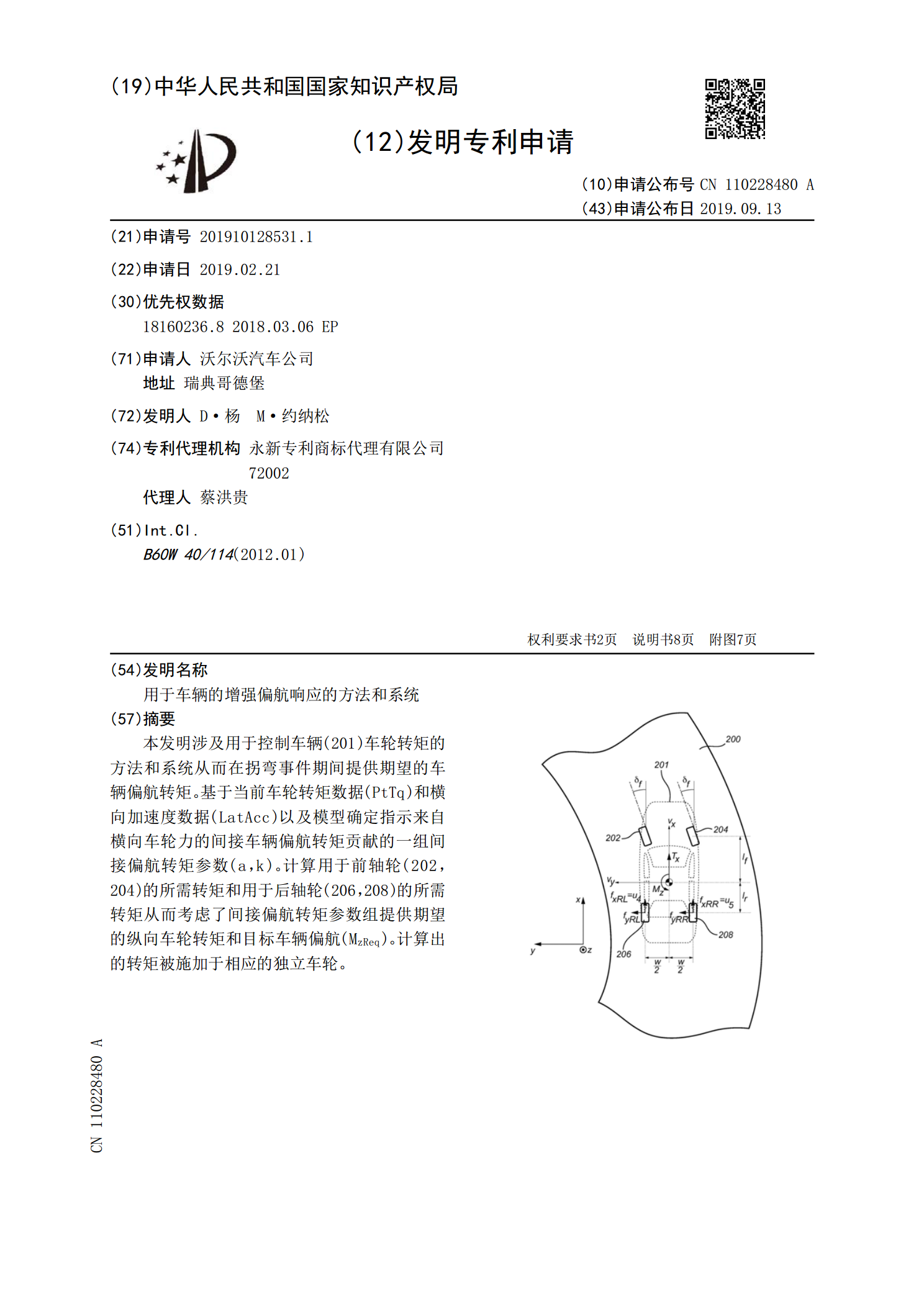
本发明涉及用于控制车辆(201)车轮转矩的方法和系统从而在拐弯事件期间提供期望的车辆偏航转矩。基于当前车轮转矩数据(PtTq)和横向加速度数据(LatAcc)以及模型确定指示来自横向车轮力的间接车辆偏航转矩贡献的一组间接偏航转矩参数(a,k)。计算用于前轴轮(202,204)的所需转矩和用于后轴轮(206,208)的所需转矩从而考虑了间接偏航转矩参数组提供期望的纵向车轮转矩和目标车辆偏航(M