
自行车骑行辅助装置、用该辅助装置的自行车及辅助方法.pdf

贤惠****66


1/10

2/10

3/10
4/10

5/10
6/10

7/10

8/10
9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

自行车骑行辅助装置、用该辅助装置的自行车及辅助方法.pdf
本发明涉及一种自行车骑行辅助装置、用该辅助装置的自行车及辅助方法。该辅助装置包括辅助轮、驱动连接装置、感测装置、控制装置以及电源,并固定安装在自行车上;感测装置用于监测自行车的运动参数,并将监测到的运动参数发送至控制装置,由控制装置根据运动参数运算得到的行车状态参数,再根据状态参数与参数阈值比较后的结果,输出控制信号至驱动连接装置,控制辅助轮抬起或落下。通过监测自行车的运动参数,来控制辅助轮抬起或落下,即在自行车平稳前进时,辅助轮自动收起,不会影响自行车的正常骑行;监测到自行车左右倾斜的角度大于设定值时,

自行车的动力辅助装置.pdf
本发明公开了一种自行车的动力辅助装置,其主要是针对自行车配置动力辅助装置后需变更车体结构,造成自行车适用性不足所进行的发明。本发明的动力辅助装置配置于自行车时,仅需将本体的扣件卡扣于座管,由螺丝锁固于座管,使带动轮组的带动轮啮合于前变速装置的齿盘即可组装完成。本发明在不破坏自行车结构的情况下,可完成动力辅助装置的组装,增加自行车的适用性。

辅助自行车传动装置.pdf
一种用于自行车的辅助自行车传动装置,具有由伸缩杆形成的横杆,伸缩杆可滑动地安装在外部通道构件中。不完全链条或不完全V形带的一端连接到伸缩杆,另一端通过弹簧连接到下管的上端,并且链条或V形带与自由回转链轮或滑轮相接合,使得当伸缩杆克服弹簧力延伸出外部通道构件时,自由回转链轮旋转,并为自行车的标准传动装置提供额外的动力。
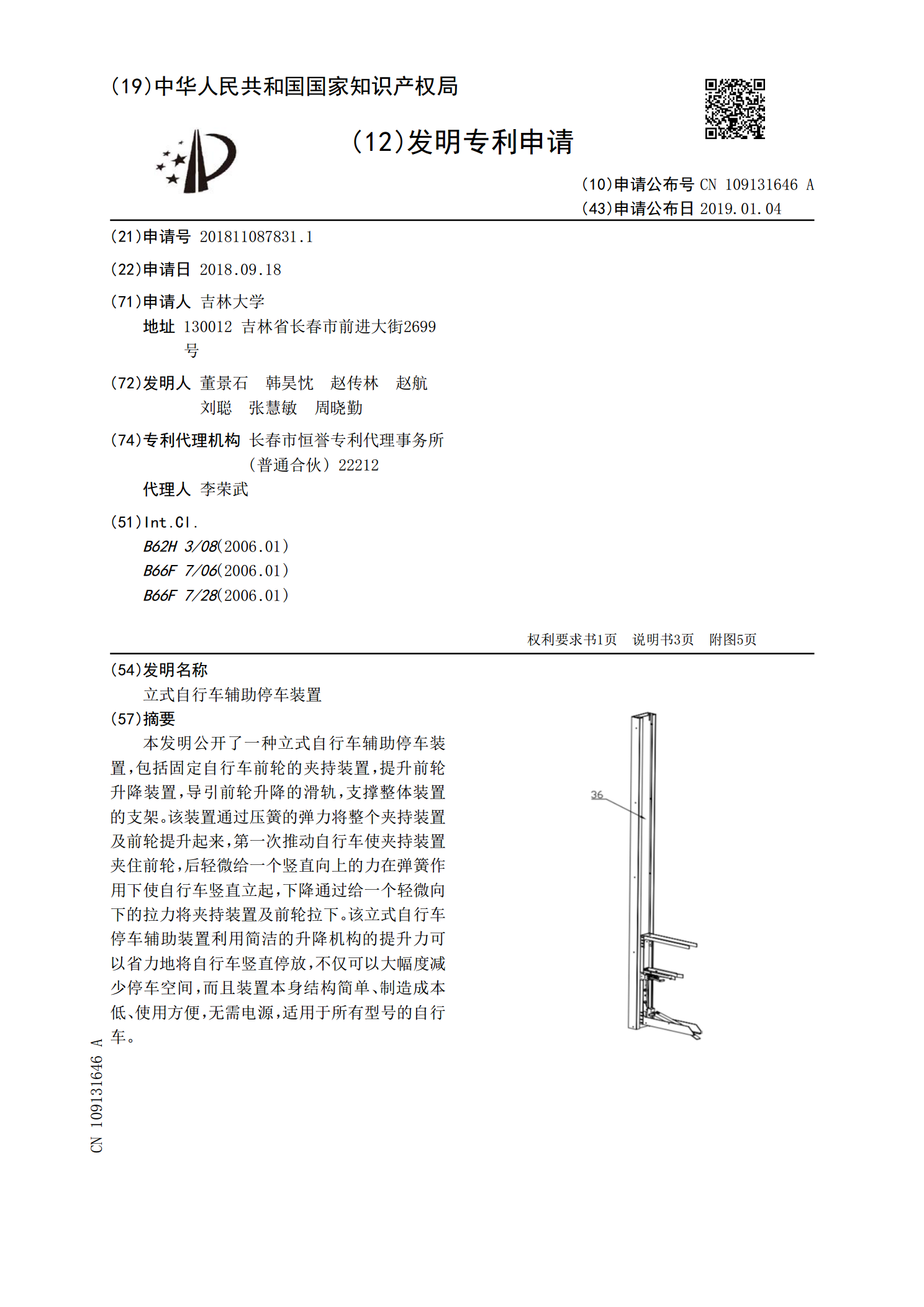
立式自行车辅助停车装置.pdf
本发明公开了一种立式自行车辅助停车装置,包括固定自行车前轮的夹持装置,提升前轮升降装置,导引前轮升降的滑轨,支撑整体装置的支架。该装置通过压簧的弹力将整个夹持装置及前轮提升起来,第一次推动自行车使夹持装置夹住前轮,后轻微给一个竖直向上的力在弹簧作用下使自行车竖直立起,下降通过给一个轻微向下的拉力将夹持装置及前轮拉下。该立式自行车停车辅助装置利用简洁的升降机构的提升力可以省力地将自行车竖直停放,不仅可以大幅度减少停车空间,而且装置本身结构简单、制造成本低、使用方便,无需电源,适用于所有型号的自行车。

电动自行车辅助刹车装置.pdf
本发明公开了一种电动自行车辅助刹车装置,输入部件、前轮速度传感器和后轮速度传感器分别与微处理器相电连,微处理器通过驱动电路与电机相连,电机通过电机轴(5)驱动传动机构,传动机构通过拉丝分别与前轮卡钳和后轮卡钳相连接;微处理器通过前轮速度传感器和后轮速度传感器分别读取电动自行车前轮的速度v