
四轮驱动双转向行走装置及方法.pdf

雨星****萌娃


1/7

2/7

3/7

4/7

5/7

6/7

7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

四轮驱动双转向行走装置及方法.pdf
本发明公开了一种四轮驱动双转向行走装置,属于转向行走技术,现有升降工作平台的行走装置机动性能差,本发明的四轮驱动双转向行走装置包括设于架体下侧的前桥、后桥,所述的前桥上安装前轮,所述的后桥上安装后轮,其特征是:所述的前轮由前动力驱动并为前轮配置前转向装置,所述的后轮由后动力驱动并为后轮配置后转向装置。本发明通过将前后轮均设置为驱动轮和转向轮,可缩小转向半径,且设备需横向移位时操作简单,从而增强了升降工作平台机动性能,可有效提高生产效率、减少安全隐患。
行走转向驱动装置及其控制方法.pdf
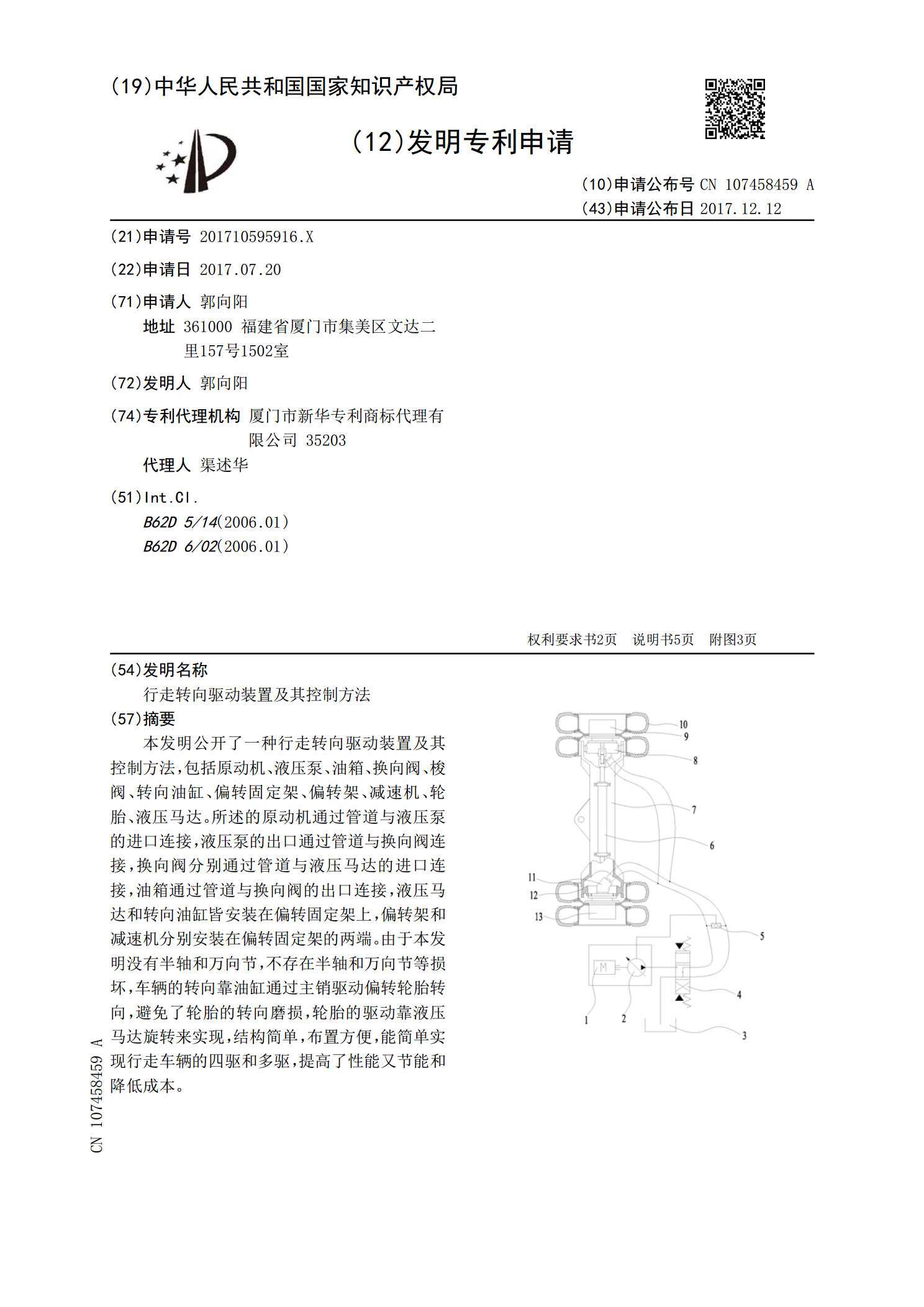
本发明公开了一种行走转向驱动装置及其控制方法,包括原动机、液压泵、油箱、换向阀、梭阀、转向油缸、偏转固定架、偏转架、减速机、轮胎、液压马达。所述的原动机通过管道与液压泵的进口连接,液压泵的出口通过管道与换向阀连接,换向阀分别通过管道与液压马达的进口连接,油箱通过管道与换向阀的出口连接,液压马达和转向油缸皆安装在偏转固定架上,偏转架和减速机分别安装在偏转固定架的两端。由于本发明没有半轴和万向节,不存在半轴和万向节等损坏,车辆的转向靠油缸通过主销驱动偏转轮胎转向,避免了轮胎的转向磨损,轮胎的驱动靠液压马达旋转

自行走载车的转向控制方法和自行走载车的转向控制装置.pdf
本发明提出了一种自行走载车的转向控制方法和自行走载车的转向控制装置,其中,自行走载车的转向控制方法包括:确定前轮的待旋转角度;根据前轮的待旋转角度确定驱动轮的线速度关系;根据驱动轮的线速度关系与前轮的待旋转角度控制设备实现转向。该技术方案,实现了控制设备的自动转向控制,提升了控制设备的自动化水平,并且不受驱动形式约束,即无论驱动形式为前驱、后驱、对角驱还是四驱对转向方式没有影响。
一种四轮驱动转向的控制方法及装置.pdf
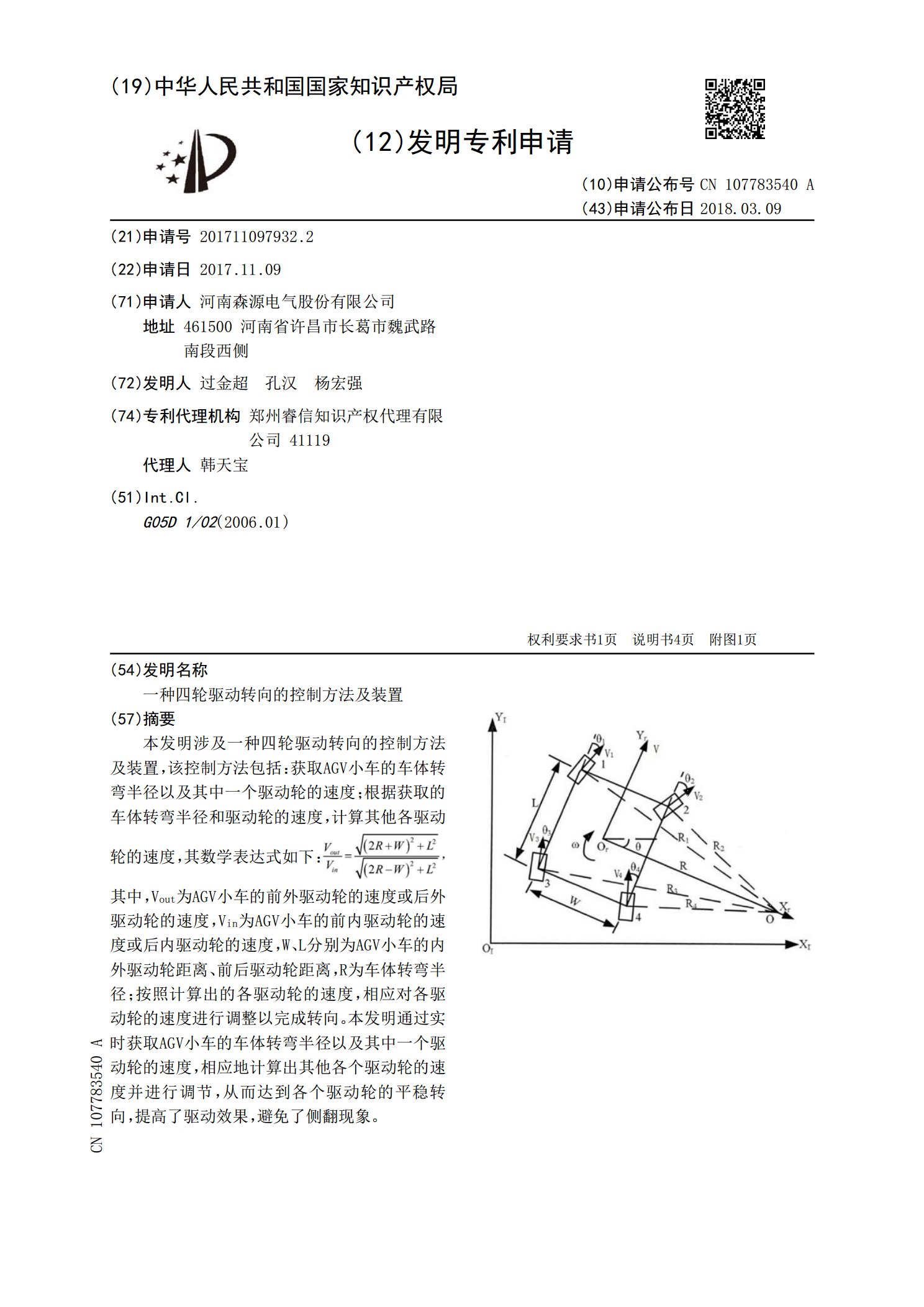
本发明涉及一种四轮驱动转向的控制方法及装置,该控制方法包括:获取AGV小车的车体转弯半径以及其中一个驱动轮的速度;根据获取的车体转弯半径和驱动轮的速度,计算其他各驱动轮的速度,其数学表达式如下:

行走转向装置、梭车及轮胎归位方法.pdf
本发明公开了一种行走转向装置、梭车及轮胎归位方法。其中,行走转向装置包括转向油缸和转向杆组件;其中,转向杆组件固定于连接体与工程机械的轮胎之间;转向油缸包括缸体和缸杆,缸体通过轴与工程机械的车架相连接,缸杆与转向杆组件相连接;通过转向油缸的伸缩带动转向杆组件的摆动;并且,转向油缸还连接有位置检测装置,位置检测装置用于在工程机械需要归位的情况下,发出归位反馈信号,归位反馈信号用于控制转向油缸的伸缩,进而使轮胎方向与车体同向。因此,本发明能够自动调整轮胎与车体保持在同一方向;进而克服了由于人工控制液压阀进行轮