
自行走载车的转向控制方法和自行走载车的转向控制装置.pdf

书生****专家


1/10

2/10
3/10
4/10

5/10

6/10

7/10
8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

自行走载车的转向控制方法和自行走载车的转向控制装置.pdf
本发明提出了一种自行走载车的转向控制方法和自行走载车的转向控制装置,其中,自行走载车的转向控制方法包括:确定前轮的待旋转角度;根据前轮的待旋转角度确定驱动轮的线速度关系;根据驱动轮的线速度关系与前轮的待旋转角度控制设备实现转向。该技术方案,实现了控制设备的自动转向控制,提升了控制设备的自动化水平,并且不受驱动形式约束,即无论驱动形式为前驱、后驱、对角驱还是四驱对转向方式没有影响。

行走转向装置、梭车及轮胎归位方法.pdf
本发明公开了一种行走转向装置、梭车及轮胎归位方法。其中,行走转向装置包括转向油缸和转向杆组件;其中,转向杆组件固定于连接体与工程机械的轮胎之间;转向油缸包括缸体和缸杆,缸体通过轴与工程机械的车架相连接,缸杆与转向杆组件相连接;通过转向油缸的伸缩带动转向杆组件的摆动;并且,转向油缸还连接有位置检测装置,位置检测装置用于在工程机械需要归位的情况下,发出归位反馈信号,归位反馈信号用于控制转向油缸的伸缩,进而使轮胎方向与车体同向。因此,本发明能够自动调整轮胎与车体保持在同一方向;进而克服了由于人工控制液压阀进行轮

踏板控制转向的自平衡车.pdf
本发明属于交通工具领域,特别是涉及一种踏板控制转向的自平衡车,包括:车体、驱动轮、联动机构、检测机构和控制机构。在操作者使用本发明提供的自平衡车的过程中,当需要进行转弯操作时(例如左转弯或者右转弯),操作者身体转向,并带动脚踏板朝向操作者转向的方向旋转。脚踏板的旋转力矩带动联动机构运动,检测机构采集联动机构的角度信号,并将角度信号传递至控制机构,控制机构根据角度信号提取相应的控制指令,该控制指令用于控制驱动轮朝向脚踏板的旋转方向运动,以此实现了自平衡车的转向操作。本发明提供的踏板控制转向的自平衡车一方面通
行走转向驱动装置及其控制方法.pdf
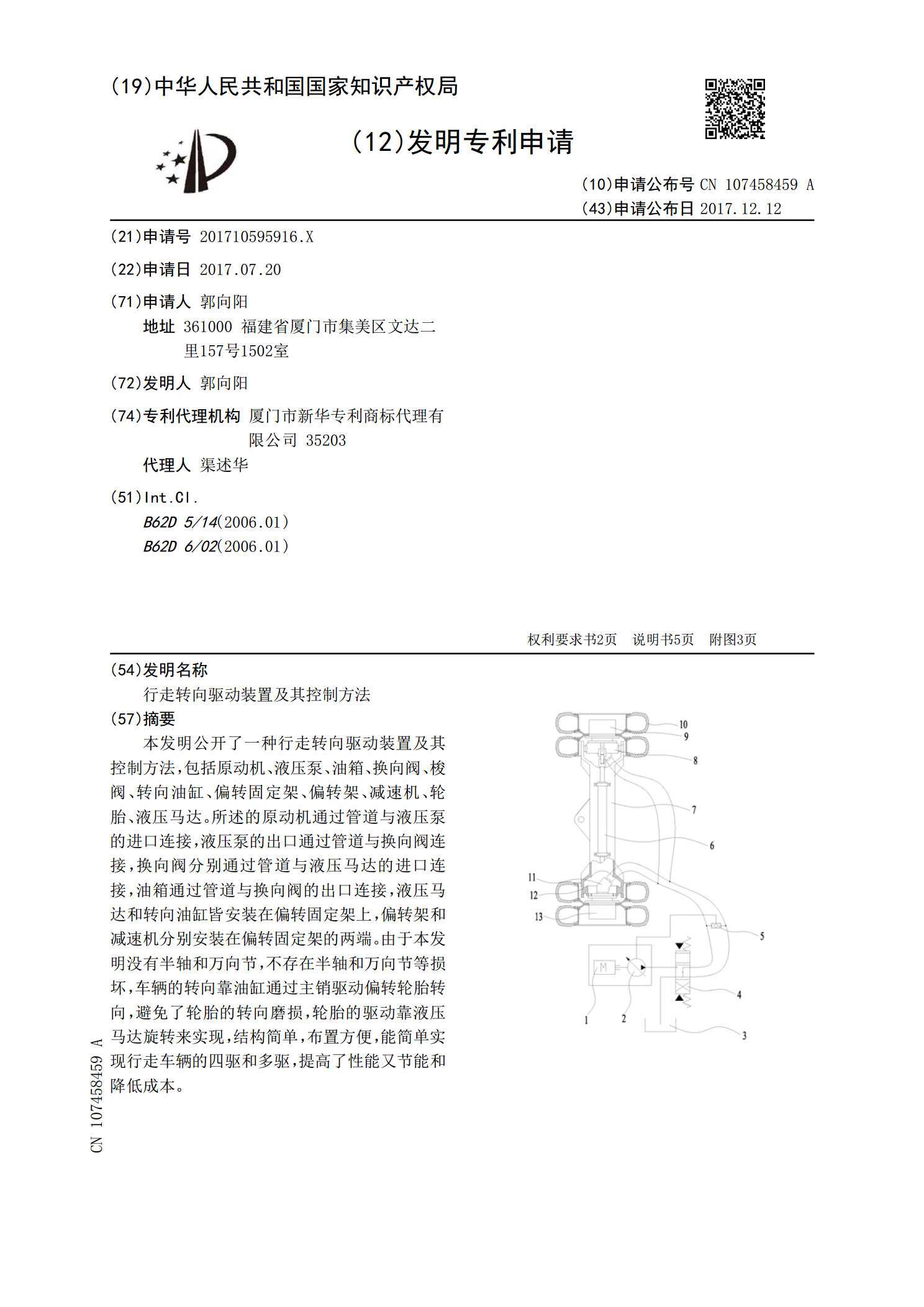
本发明公开了一种行走转向驱动装置及其控制方法,包括原动机、液压泵、油箱、换向阀、梭阀、转向油缸、偏转固定架、偏转架、减速机、轮胎、液压马达。所述的原动机通过管道与液压泵的进口连接,液压泵的出口通过管道与换向阀连接,换向阀分别通过管道与液压马达的进口连接,油箱通过管道与换向阀的出口连接,液压马达和转向油缸皆安装在偏转固定架上,偏转架和减速机分别安装在偏转固定架的两端。由于本发明没有半轴和万向节,不存在半轴和万向节等损坏,车辆的转向靠油缸通过主销驱动偏转轮胎转向,避免了轮胎的转向磨损,轮胎的驱动靠液压马达旋转

直列式电动车后轮转向自平衡控制装置及方法.pdf
本发明涉及一种直列式两轮电动车后轮转向自平衡控制装置,包括转速传感器、车身倾斜度传感器、前轮转角传感器、控制器和后轮转向系,所述转速传感器设置在电动车后轮电机处,车身倾斜度传感器和控制器均固定设置在电动车车架上,前轮转角传感器设置在方向柱与车架前管的铰接处,转速传感器、车身倾斜度传感器和前轮转角传感器分别连接至控制器,所述后轮转向系的两端分别固定连接电动车车架和电动车后轮。车辆转弯时,如果车辆必须避让险情,前轮改变转角导致车辆失衡,控制后轮进行辅助转向,维持车辆平衡;在车辆超低速行驶或者停驶等待过程中,运