
汽车转向控制方法与系统以及汽车.pdf

书生****22


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

汽车转向控制方法与系统以及汽车.pdf
本发明提供了一种汽车转向控制方法与系统以及汽车,用以解决现有技术中车辆难以兼顾操纵稳定性和通过性的问题。该方法包括:在前桥车轮转向时,根据公式Licot(αi)=Ljcot(αj)和公式Licot(βi)=Ljcot(βj)确定后桥车轮转角,其中,αi和αj分别表示汽车第i、j轴外侧轮转角,βi和βj分别表示汽车第i、j轴内侧轮转角,所述汽车第i、j轴分别位于所述转向中心线两侧,i、j为自然数,Li和Lj表示汽车第i、j轴到转向中心线的距离,并且与当前汽车方向盘转角成预设的函数关系;向汽车的转向控制系统发
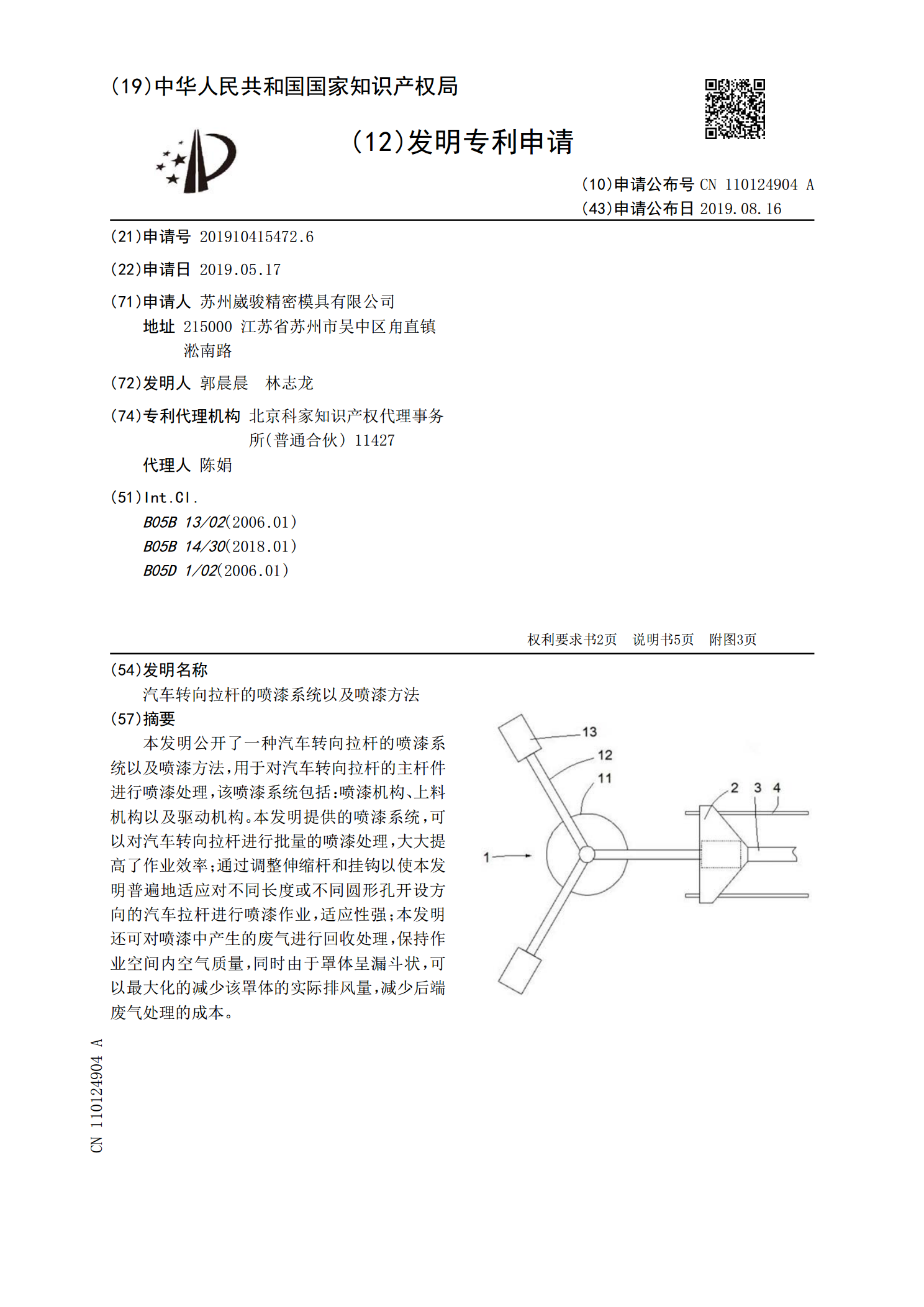
汽车转向拉杆的喷漆系统以及喷漆方法.pdf
本发明公开了一种汽车转向拉杆的喷漆系统以及喷漆方法,用于对汽车转向拉杆的主杆件进行喷漆处理,该喷漆系统包括:喷漆机构、上料机构以及驱动机构。本发明提供的喷漆系统,可以对汽车转向拉杆进行批量的喷漆处理,大大提高了作业效率;通过调整伸缩杆和挂钩以使本发明普遍地适应对不同长度或不同圆形孔开设方向的汽车拉杆进行喷漆作业,适应性强;本发明还可对喷漆中产生的废气进行回收处理,保持作业空间内空气质量,同时由于罩体呈漏斗状,可以最大化的减少该罩体的实际排风量,减少后端废气处理的成本。

汽车转向灯自动控制系统以及控制方法.pdf
汽车转向灯自动控制系统包括车轮速度传感器、方向盘转角传感器、车身控制器及转向灯。车轮速度传感器用以获取车轮速度信息,方向盘转角传感器用以获取方向盘转角信息。车身控制器与车轮速度传感器及方向盘转角传感器连接,并包括信息输入模块、信息处理模块及信息输出模块。信息输入模块接收车轮速度信息及方向盘转角信息,经由信息处理模块处理后获得转向灯控制信号,在通过信息输出模块发送转向灯控制信号至转向灯。本案还涉及汽车转向灯自动控制方法。此汽车转向灯自动控制系统和控制方法实现简单,且能有效的降低汽车驾驶员忘记开启或关闭转向灯
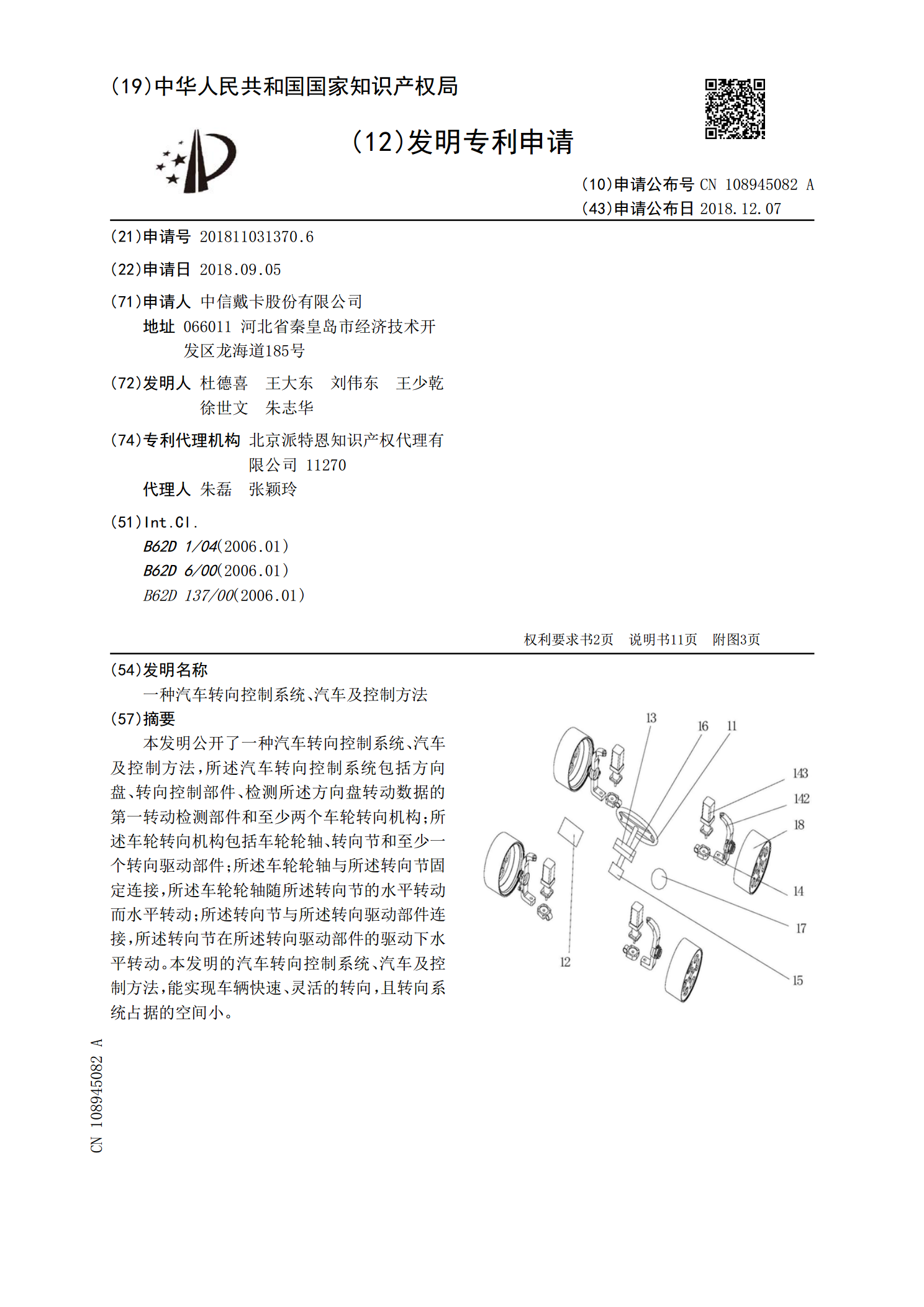
一种汽车转向控制系统、汽车及控制方法.pdf
本发明公开了一种汽车转向控制系统、汽车及控制方法,所述汽车转向控制系统包括方向盘、转向控制部件、检测所述方向盘转动数据的第一转动检测部件和至少两个车轮转向机构;所述车轮转向机构包括车轮轮轴、转向节和至少一个转向驱动部件;所述车轮轮轴与所述转向节固定连接,所述车轮轮轴随所述转向节的水平转动而水平转动;所述转向节与所述转向驱动部件连接,所述转向节在所述转向驱动部件的驱动下水平转动。本发明的汽车转向控制系统、汽车及控制方法,能实现车辆快速、灵活的转向,且转向系统占据的空间小。

汽车转向跟随控制系统及方法.pdf
本发明提供一种汽车转向跟随控制系统及方法,涉及汽车领域。该汽车转向跟随控制系统包括控制器、角度传感器及辅助车灯。其中,控制器与角度传感器、辅助车灯连接,角度传感器设于汽车转向装置上,辅助车灯设于汽车前侧;角度传感器,用于采集汽车转动角度转向信息,并向控制器发送汽车转动角度。控制器,用于接收角度传感器发送的汽车转动角度,并获取汽车转动方向,根据汽车转动角度和汽车转动方向控制辅助车灯调整角度。角度传感器可根据方向盘的转动情况获取轮胎的转向角度,从而实现辅助车灯与轮胎一起转向,可在光线较弱的条件下,增强转向区域