
汽车转向灯自动控制系统以及控制方法.pdf

一只****ng


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

汽车转向灯自动控制系统以及控制方法.pdf
汽车转向灯自动控制系统包括车轮速度传感器、方向盘转角传感器、车身控制器及转向灯。车轮速度传感器用以获取车轮速度信息,方向盘转角传感器用以获取方向盘转角信息。车身控制器与车轮速度传感器及方向盘转角传感器连接,并包括信息输入模块、信息处理模块及信息输出模块。信息输入模块接收车轮速度信息及方向盘转角信息,经由信息处理模块处理后获得转向灯控制信号,在通过信息输出模块发送转向灯控制信号至转向灯。本案还涉及汽车转向灯自动控制方法。此汽车转向灯自动控制系统和控制方法实现简单,且能有效的降低汽车驾驶员忘记开启或关闭转向灯

一种汽车转向灯自动控制系统及其控制方法.pdf
本发明揭示了一种汽车转向灯自动控制系统,该控制系统将采集左、右轮速信号经过电控单元传送至ECU,并由ECU根据此轮速信号驱动左、右灯继电器控制组合开关实现左、右转向灯组的启闭。此控制系统能够精确的控制转向灯,即使微小的转向操作也能准确开启,并且此自动控制系统与手动操纵杆同共存控制转向灯,使得驾驶人员对转向灯操作更便捷。

一种无人驾驶汽车的转向灯自动控制系统.pdf
本发明涉及车辆技术领域,具体涉及一种无人驾驶汽车的转向灯自动控制系统;包括导航单元、处理单元、执行单元、电源模块和环境探测单元,环境探测单元包括摄像头和四个多模式毫米波雷达,四个多模式毫米波雷达分别安装在车辆的左前侧、右前侧、左后侧以及右后侧,摄像头安装在车辆的正前侧,四个多模式毫米波雷达和摄像头均通过无线通信模块与处理单元通信连接,每个多模式毫米波雷达均包括天线模块和控制模块,天线模块与控制模块通信连接,控制模块用于控制天线模块实现短距、中距和远距三种模式,采用上述结构,利用少数量的雷达即可实现车辆车身
转向灯辅助控制方法和转向灯辅助控制装置.pdf
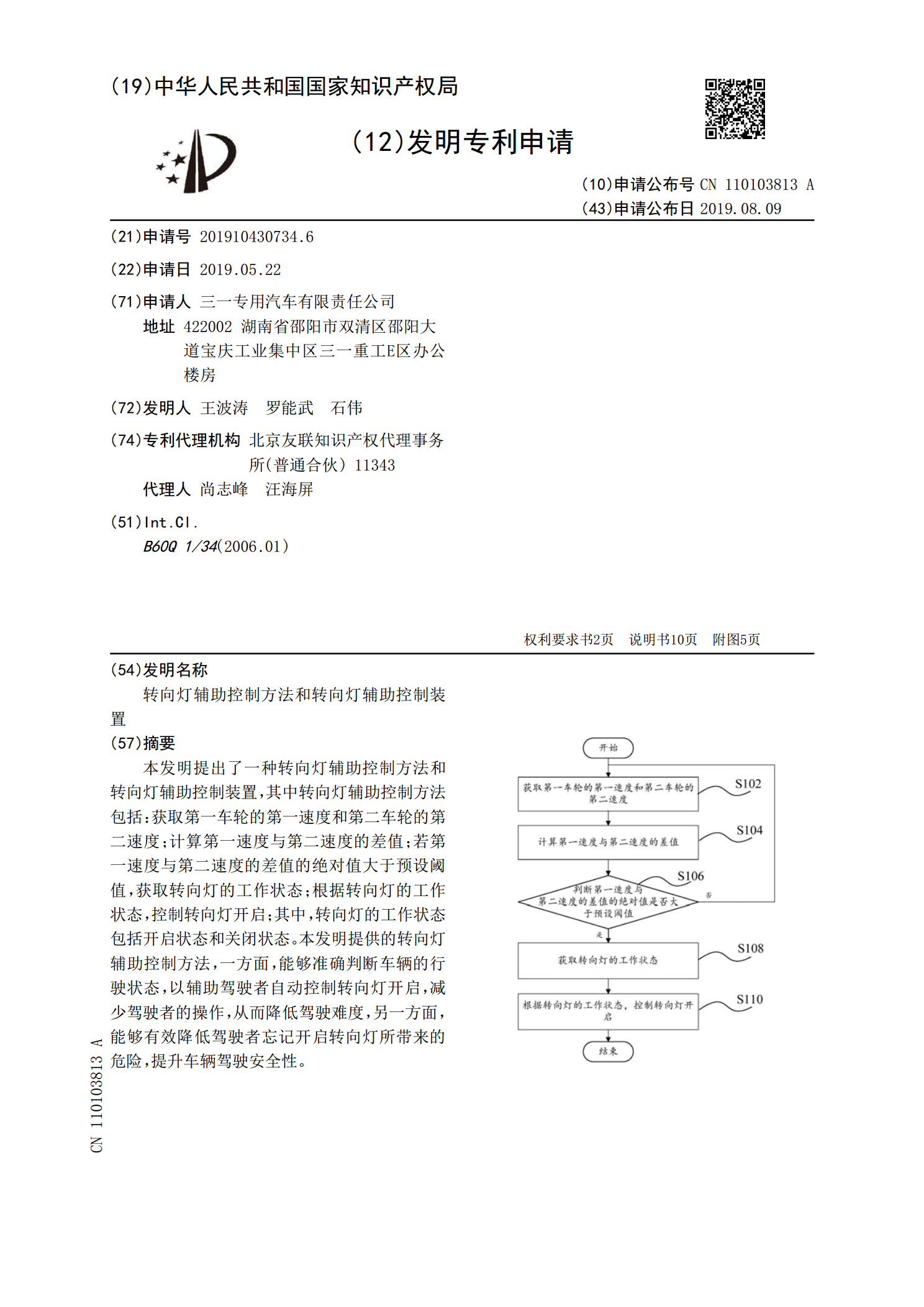
本发明提出了一种转向灯辅助控制方法和转向灯辅助控制装置,其中转向灯辅助控制方法包括:获取第一车轮的第一速度和第二车轮的第二速度;计算第一速度与第二速度的差值;若第一速度与第二速度的差值的绝对值大于预设阈值,获取转向灯的工作状态;根据转向灯的工作状态,控制转向灯开启;其中,转向灯的工作状态包括开启状态和关闭状态。本发明提供的转向灯辅助控制方法,一方面,能够准确判断车辆的行驶状态,以辅助驾驶者自动控制转向灯开启,减少驾驶者的操作,从而降低驾驶难度,另一方面,能够有效降低驾驶者忘记开启转向灯所带来的危险,提升车

汽车转向控制方法与系统以及汽车.pdf
本发明提供了一种汽车转向控制方法与系统以及汽车,用以解决现有技术中车辆难以兼顾操纵稳定性和通过性的问题。该方法包括:在前桥车轮转向时,根据公式Licot(αi)=Ljcot(αj)和公式Licot(βi)=Ljcot(βj)确定后桥车轮转角,其中,αi和αj分别表示汽车第i、j轴外侧轮转角,βi和βj分别表示汽车第i、j轴内侧轮转角,所述汽车第i、j轴分别位于所述转向中心线两侧,i、j为自然数,Li和Lj表示汽车第i、j轴到转向中心线的距离,并且与当前汽车方向盘转角成预设的函数关系;向汽车的转向控制系统发