
一种航天器小角度姿态机动控制参数优化方法.pdf

猫巷****婉慧


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种航天器小角度姿态机动控制参数优化方法.pdf
本发明涉及一种航天器小角度姿态机动控制参数优化方法。在航天器姿态参考坐标系下建立含有飞轮或控制力矩陀螺的航天器动力学和运动学模型,基于非线性输入受限反馈控制方法设计小角度姿态机动控制器,用改进的模拟退火优化方法对所设计的姿态控制器进行控制参数优化选取。本发明可以适用于各类航天器姿态控制器设计中。本发明属于航天控制技术领域,不仅可以提高航天器姿态控制精度,而且可以大大提高控制器设计效率。

航天器大角度姿态快速机动控制器参数优化设计.docx
航天器大角度姿态快速机动控制器参数优化设计随着现代航空航天技术的不断发展,高精度的大角度姿态快速机动控制系统成为飞行器必不可少的组成部分。因此,设计一种优化的控制器参数算法,对于提高航空航天器的大角度姿态快速控制效能,具有非常重要的意义。本文将着重研究航天器大角度姿态快速机动控制器的参数优化设计,分别从控制器配置、参数选取与自适应优化等三个方面进行了具体阐述。一、控制器配置在航天器大角度姿态快速机动控制系统中,PID控制器是一种常见的控制器配置方式。在调节PID控制器的响应过程中,需要充分考虑系统的稳定性

航天器姿态机动优化容错控制.docx
航天器姿态机动优化容错控制随着人类航天技术的不断发展,航天器的姿态控制也成为了一个重要的研究领域。在实际的航天过程中,航天器往往需要进行各种不同的机动,而机动过程中姿态的控制就变得格外重要。在这一领域中,姿态机动优化容错控制成为一个备受关注的课题。姿态机动优化容错控制,顾名思义,就是为了控制航天器在机动过程中的姿态而进行的一系列优化控制方法。具体来说,这一过程包括了优化机动起始时间、姿态切换时间以及机动后的姿态控制和容错控制。其中,优化起始时间可以帮助航天器更好地完成机动任务,而优化姿态切换时间则可以减少

基于凸优化的航天器轨道姿态机动受限控制.docx
基于凸优化的航天器轨道姿态机动受限控制基于凸优化的航天器轨道姿态机动受限控制摘要:航天器轨道姿态机动是航天器任务过程中重要的一部分,但受限于航天器的物理特性以及任务需求,机动受到了参数限制。为了确保航天器安全稳定地进行轨道姿态机动,本文基于凸优化方法,提出了一种航天器轨道姿态机动受限控制方案。通过建立数学模型,将机动受限控制问题转化为凸优化问题,并采用凸优化算法进行求解。仿真结果显示,本文提出的方法能够有效控制航天器的机动过程,满足姿态控制的需求。关键词:航天器、轨道姿态机动、受限控制、凸优化、仿真1.引
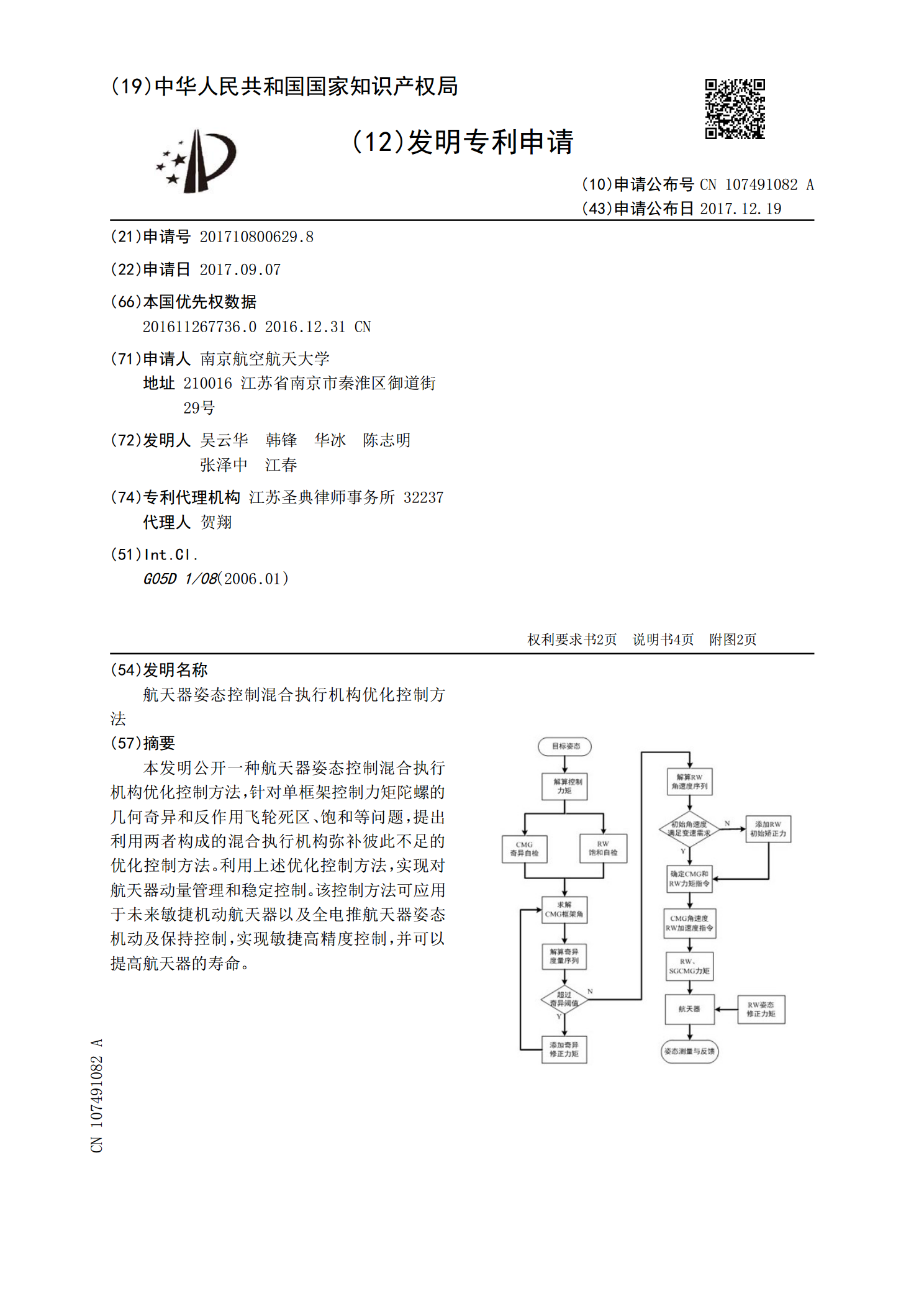
航天器姿态控制混合执行机构优化控制方法.pdf
本发明公开一种航天器姿态控制混合执行机构优化控制方法,针对单框架控制力矩陀螺的几何奇异和反作用飞轮死区、饱和等问题,提出利用两者构成的混合执行机构弥补彼此不足的优化控制方法。利用上述优化控制方法,实现对航天器动量管理和稳定控制。该控制方法可应用于未来敏捷机动航天器以及全电推航天器姿态机动及保持控制,实现敏捷高精度控制,并可以提高航天器的寿命。