
航天器姿态控制混合执行机构优化控制方法.pdf

努力****梓颖


1/9
2/9

3/9
4/9

5/9

6/9

7/9
8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
航天器姿态控制混合执行机构优化控制方法.pdf
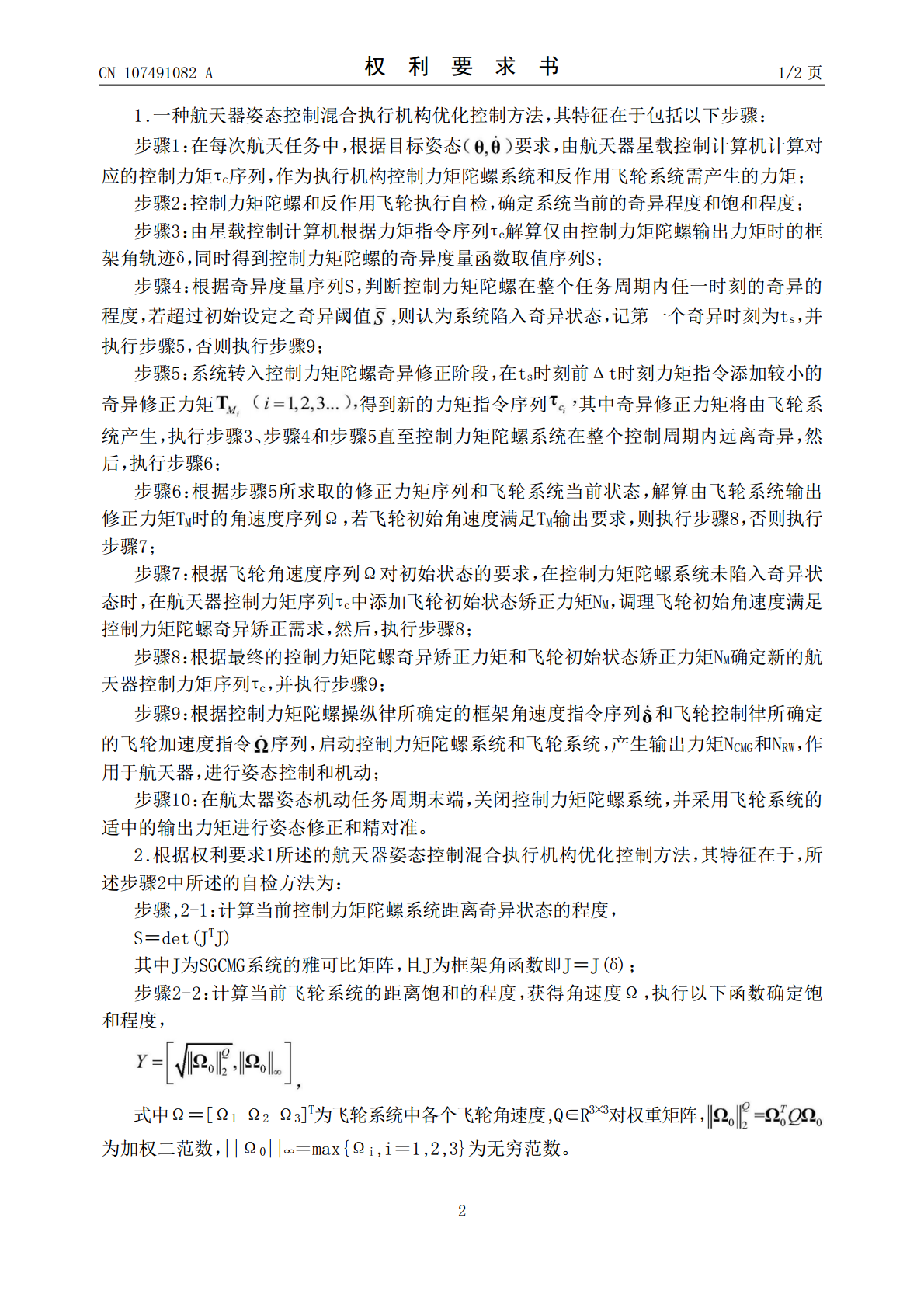
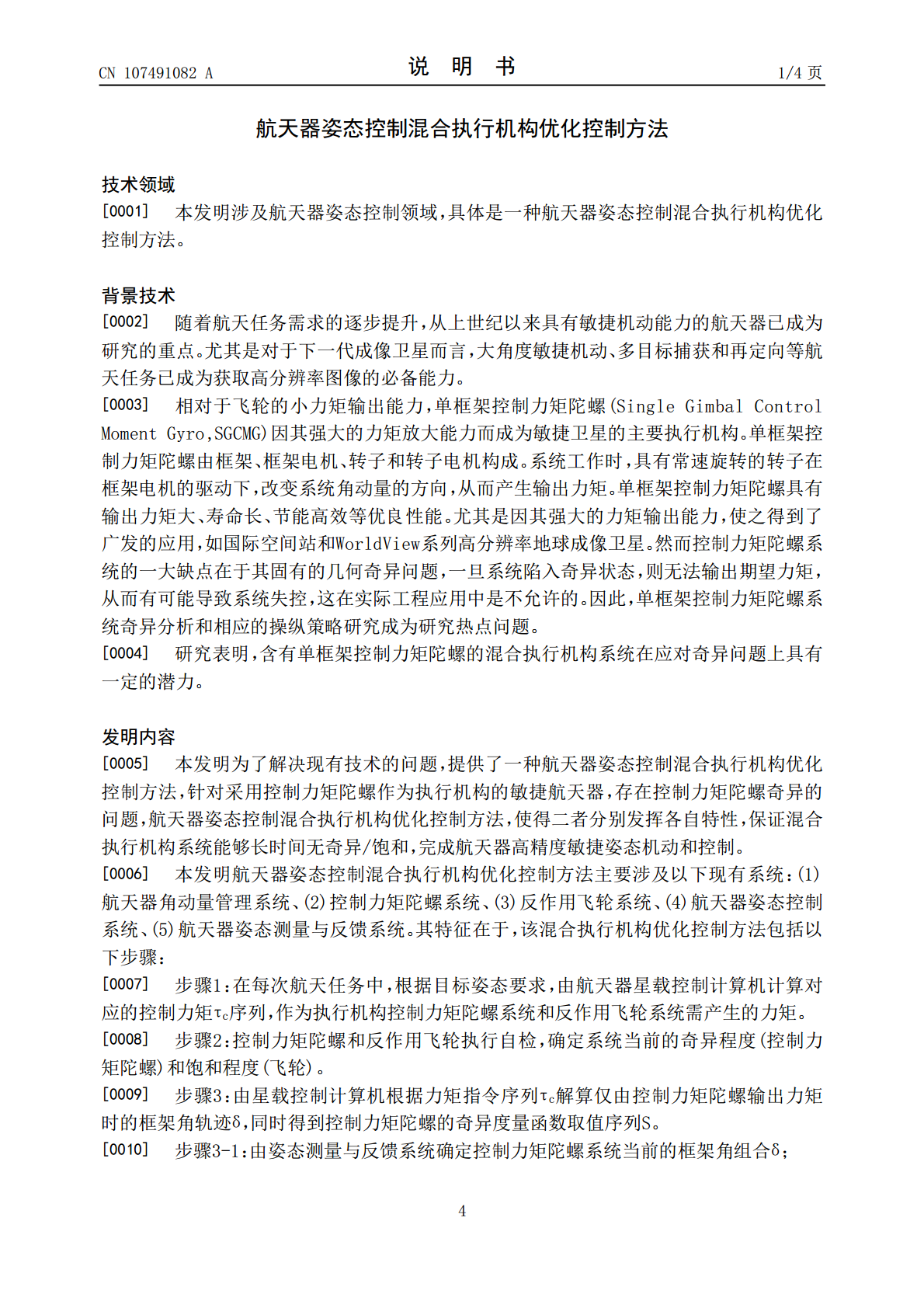
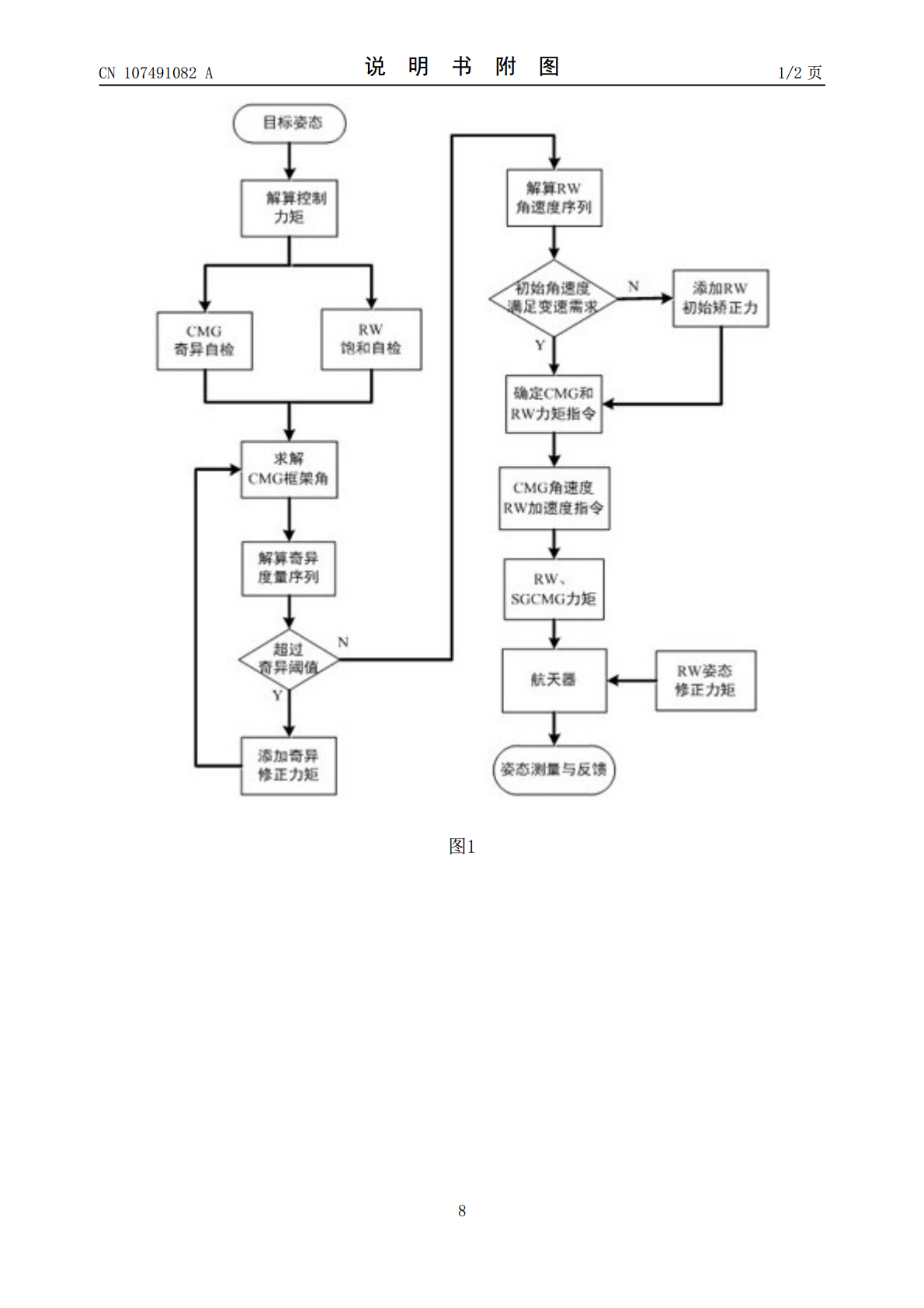
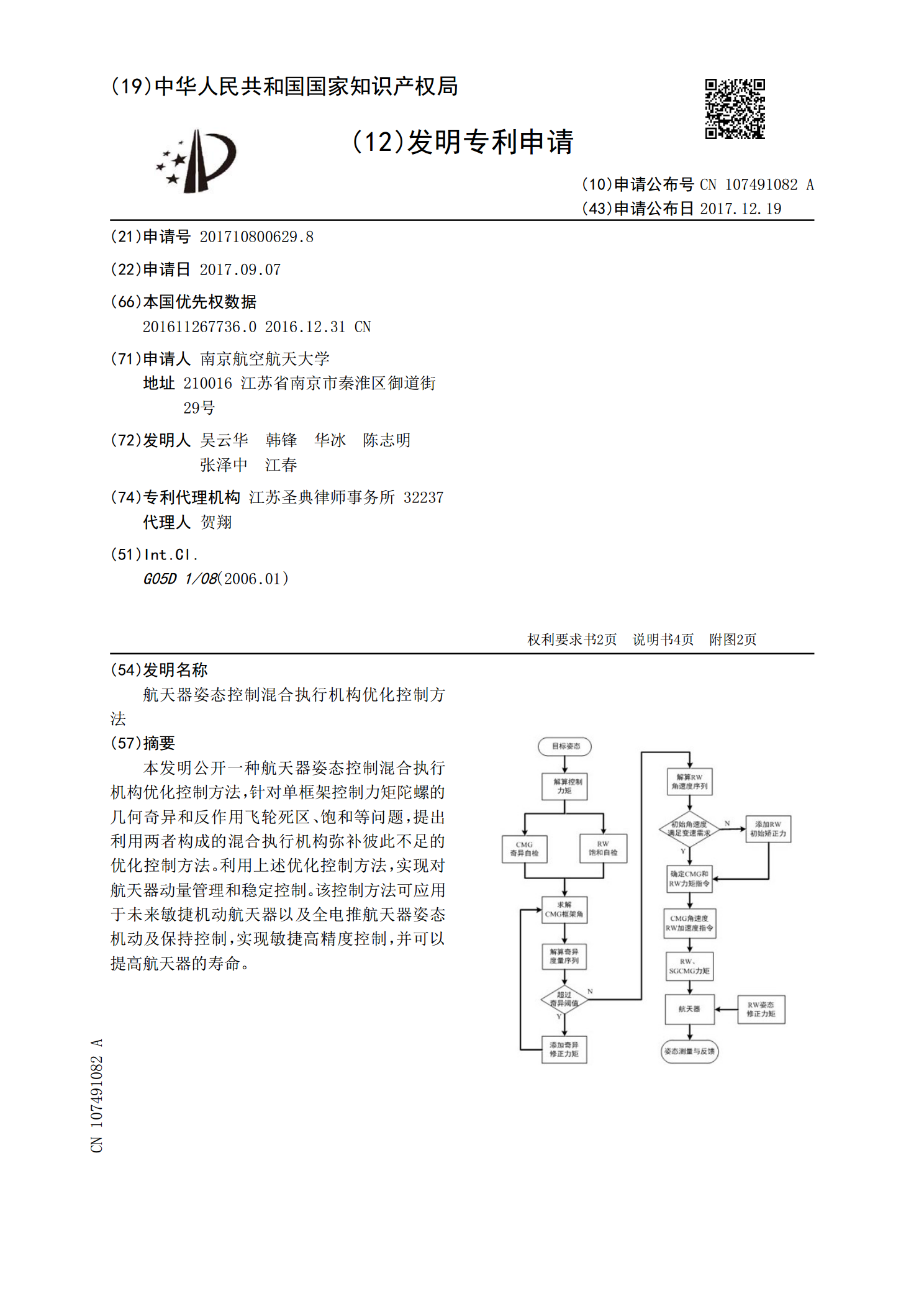
本发明公开一种航天器姿态控制混合执行机构优化控制方法,针对单框架控制力矩陀螺的几何奇异和反作用飞轮死区、饱和等问题,提出利用两者构成的混合执行机构弥补彼此不足的优化控制方法。利用上述优化控制方法,实现对航天器动量管理和稳定控制。该控制方法可应用于未来敏捷机动航天器以及全电推航天器姿态机动及保持控制,实现敏捷高精度控制,并可以提高航天器的寿命。
一种基于具有混合执行机构的航天器姿态控制方法.pdf
本发明公开了一种基于具有混合执行机构的航天器姿态控制方法,包括以下步骤:基于具有混合执行机构的航天器,综合考虑执行机构安装偏差,转动惯量不确定性与外部扰动对航天器姿态控制性能的影响,建立航天器姿态跟踪动力学模型;设计自适应虚拟控制器以及相应的自适应律;设计鲁棒在线控制分配算法,将虚拟控制信号分配到各个执行机构上,进行执行器重构。本方法综合利用推力器和反作用飞轮两种执行机构的特性,克服了单一执行机构的局限性,提高了执行机构的控制性能,保证了在存在执行机构安装偏差情况下航天器姿态控制系统的稳定性,具有较强的控
一种考虑混合执行机构切换的航天器姿态动态控制分配方法.pdf
一种考虑混合执行机构切换的航天器姿态动态控制分配方法,包括以下步骤:首先,建立采用由单框架控制力矩陀螺和反作用飞轮组成的混合执行机构的航天器姿态控制系统模型;然后,设计姿态控制系统的控制律,保证系统的稳定性;之后,设计控制分配方法的优化目标函数,并设计能够实现执行机构切换的切换参数;最后,基于拉格朗日乘子法和李雅普诺夫函数的方法设计了动态控制分配方法,该方法可以实现混合执行机构的平稳切换,提高航天器姿态机动时的快速性和姿态定向时的准确性和稳定性,可以较大的提高的计算效率。

航天器姿态机动优化容错控制.docx
航天器姿态机动优化容错控制随着人类航天技术的不断发展,航天器的姿态控制也成为了一个重要的研究领域。在实际的航天过程中,航天器往往需要进行各种不同的机动,而机动过程中姿态的控制就变得格外重要。在这一领域中,姿态机动优化容错控制成为一个备受关注的课题。姿态机动优化容错控制,顾名思义,就是为了控制航天器在机动过程中的姿态而进行的一系列优化控制方法。具体来说,这一过程包括了优化机动起始时间、姿态切换时间以及机动后的姿态控制和容错控制。其中,优化起始时间可以帮助航天器更好地完成机动任务,而优化姿态切换时间则可以减少

利用充液变惯量飞轮控制航天器姿态的方法及其执行机构.pdf
本发明是一种利用充液变惯量飞轮控制航天器姿态的方法及其执行机构。执行结构包括真空框架、飞轮、电机、轴承和控制机构,控制机构对电机的转速和充液腔内的液体排放进行控制,飞轮充液腔内的液体通过轴向导管和径向导管注入和排空。本发明方法在航天器相互垂直的三轴上,分别安装了一个执行机构,各执行结构的飞轮对称轴与所在的坐标轴重合,根据动量矩定理得到三轴控制力矩与执行机构动量矩变化律的关系,根据当前飞轮的转速值与转速门限值的大小,调整飞轮充液腔中液体的充放,不断实时调整调整航天器的姿态控制力矩,使与期望姿态重合。本发明避