
一种巡线机器人跨越障碍滑移机构及巡线机器人设备.pdf

森林****来了

1/10
2/10
3/10

4/10

5/10
6/10

7/10

8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种巡线机器人跨越障碍滑移机构及巡线机器人设备.pdf
本发明涉及一种巡线机器人跨越障碍滑移机构,包括:沿输电线缆方向顺次安装在设备机架内的至少三组滑移组件,每组滑移组件均具有用于悬挂在输电线缆上随设备机架的带动而滑移的滑移挂轮;且所述滑移机构还包括:设置在位于前侧的滑移组件上用于检测线路障碍的检测反馈单元;以及信号控制单元,用于根据线路障碍检测结果发送控制信号给所述至少三组滑移组件,以沿输电线缆方向依次控制每组滑移组件的滑移挂轮脱离所述输电线缆以跨越所述线路障碍。本发明的巡线机器人跨越障碍滑移机构及巡线机器人设备通过悬挂于输电线缆上的滑移挂轮支撑设备整体重量
一种巡线机器人跨越障碍行走机构及巡线机器人设备.pdf
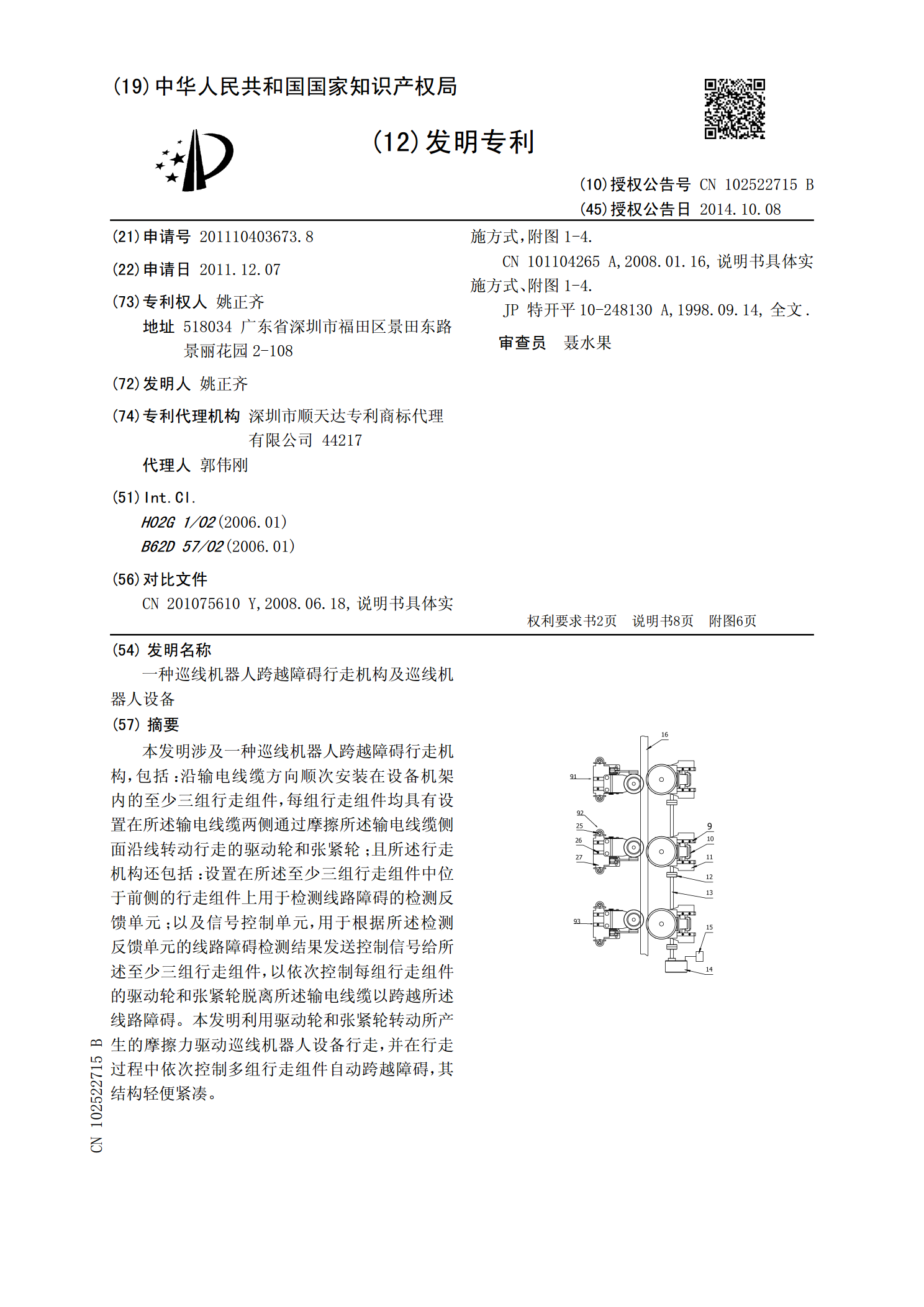
本发明涉及一种巡线机器人跨越障碍行走机构,包括:沿输电线缆方向顺次安装在设备机架内的至少三组行走组件,每组行走组件均具有设置在所述输电线缆两侧通过摩擦所述输电线缆侧面沿线转动行走的驱动轮和张紧轮;且所述行走机构还包括:设置在所述至少三组行走组件中位于前侧的行走组件上用于检测线路障碍的检测反馈单元;以及信号控制单元,用于根据所述检测反馈单元的线路障碍检测结果发送控制信号给所述至少三组行走组件,以依次控制每组行走组件的驱动轮和张紧轮脱离所述输电线缆以跨越所述线路障碍。本发明利用驱动轮和张紧轮转动所产生的摩擦力

巡线机器人.pdf
本发明公开了一种巡线机器人,属于特种机器人领域,旨在提供一种速度平稳、能够灵活地跨越高压线路上的障碍、体积小、重量轻和耗电省的巡线机器人。它由三个机器人单体构成,所述的机器人单体包括机械轮式行走机构和越障机构,所述的机械轮式行走机构和越障机构通过上连接板进行连接,所述的控制装置固定在机架下板上,所述的避障机构固联在机架上。本发明增加机械轮式机构使巡线机器人在高压线上平稳运行,同时具有一定的爬坡能力,增加丝杆避障机构可以使巡线机器人能够较灵活地跨越高压线路上的障碍。

一种巡线机器人.pdf
本发明公开了一种巡线机器人,包括两个巡线机器人本体,巡线机器人本体包括行走轮组机构、夹持机构和变距机构,变距机构包括:基座;设置于基座上的滑座;架设在基座上的丝杠;与丝杠螺纹配合的丝母,丝母与滑座相连;设置于基座上变距驱动装置;夹持机构包括:设置于基座上的支撑盒;设置于支撑盒上的支撑架;设置于支撑架上通过传动机构连接的第一转动轴和第二转动轴;驱动第一转动轴和第二转动轴中的一个转动的夹持驱动装置;固定在第一转动轴上的第一夹持爪;固定在第二转动轴上的第二夹持爪,第一夹持爪和第二夹持爪交叉后能够挂接在线路上,分

除冰巡线机器人.pdf
本发明公开了一种除冰巡线机器人,旨在提供一种结构简单,运行平稳,可自动避障、自动除冰的巡线机器人,属于特种机器人领域。它包括机器人本体和除冰装置,所述的机器人本体包括机械轮式行走机构和越障机构,所述的机械轮式行走机构和越障机构通过上连接板进行连接,构成一个机器人本体,所述的控制装置固定在机架下板上,所述的避障机构固联在机架上,所述的除冰装置固定在滚轮固定架上。本发明增加除冰装置,可以完成自动除冰功能,同时本机器人结构轻巧,还具有自动避障功能,最大限度减小覆冰对输电线路的影响,保障供电安全。