
除冰巡线机器人.pdf

努力****向丝


1/8

2/8

3/8

4/8

5/8
6/8
7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

除冰巡线机器人.pdf
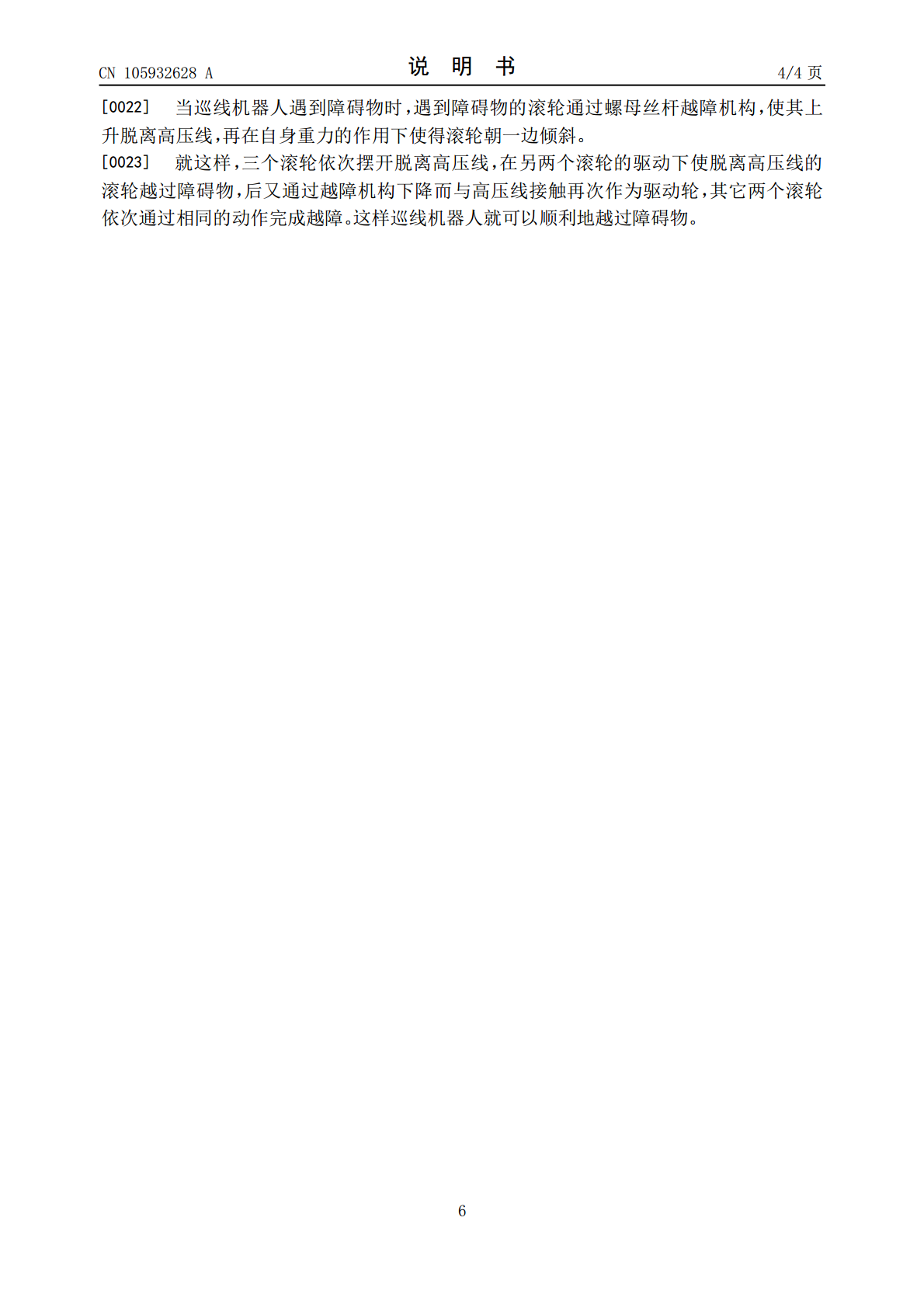
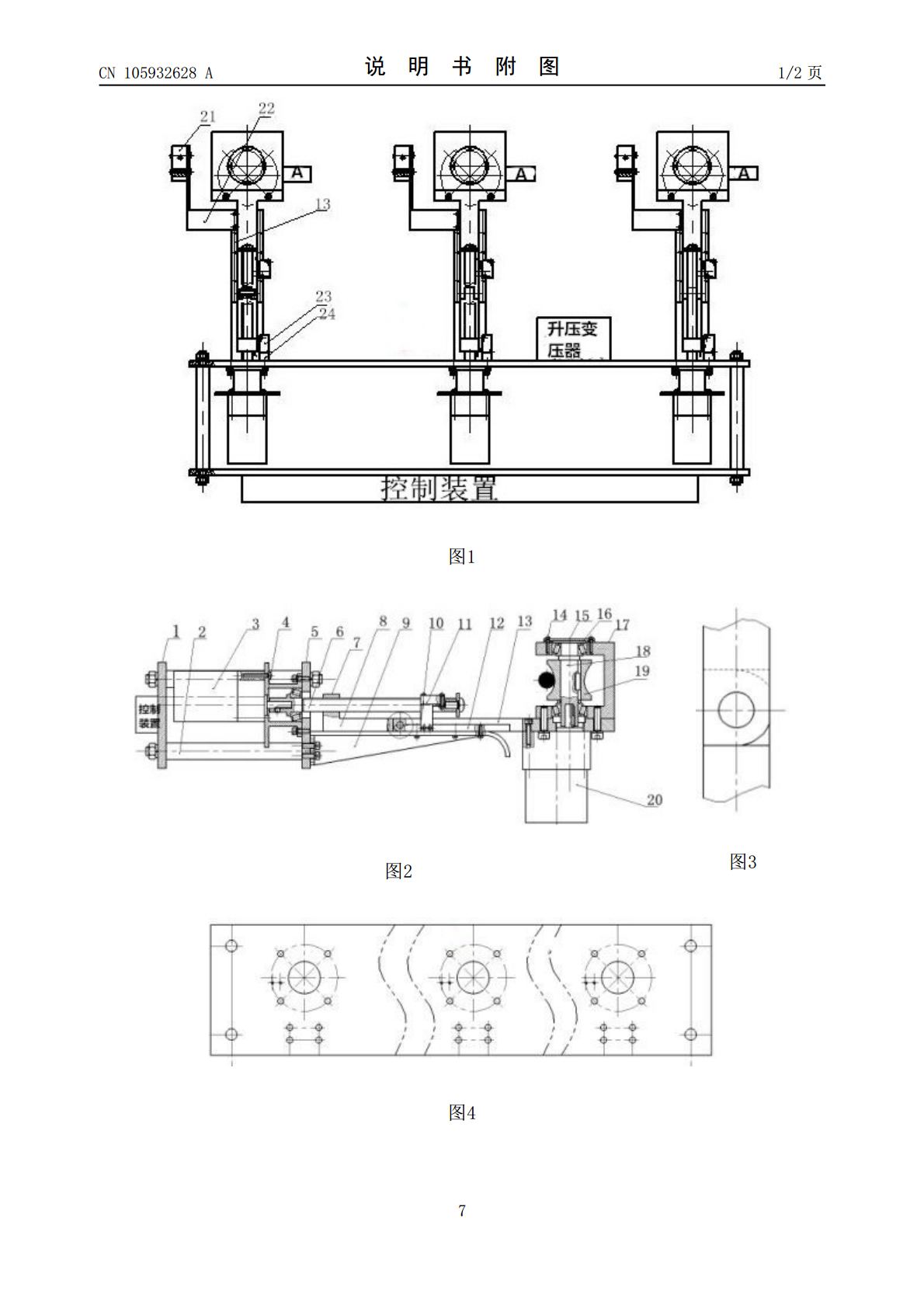
本发明公开了一种除冰巡线机器人,旨在提供一种结构简单,运行平稳,可自动避障、自动除冰的巡线机器人,属于特种机器人领域。它包括机器人本体和除冰装置,所述的机器人本体包括机械轮式行走机构和越障机构,所述的机械轮式行走机构和越障机构通过上连接板进行连接,构成一个机器人本体,所述的控制装置固定在机架下板上,所述的避障机构固联在机架上,所述的除冰装置固定在滚轮固定架上。本发明增加除冰装置,可以完成自动除冰功能,同时本机器人结构轻巧,还具有自动避障功能,最大限度减小覆冰对输电线路的影响,保障供电安全。

一种巡线除冰机器人及其越障方法.pdf
本发明一种巡线除冰机器人及其越障方法,包括机体,在机体两侧分别设置有一个运动臂,所述运动臂的上端设置有主动轮和除冰轮,所述主动轮和除冰轮均连接驱动电机,所述主动轮通过推杆安装在除冰轮上方,主动轮和除冰轮之间架设待巡检线缆,机体的底板上安装有第一电机和第二电机,所述第一电机输出轴连接第一轴,第一轴外围套接有第二轴,所述第二轴与运动臂下端连接,底板上还安装有蓄电装置,机体前后部安装有探测器。机构运动简单、机械结构紧凑、质量轻、运动较灵活,能够自动越障,且轮式和臂式结合的运动方式可以使除冰和巡线的效率大大提高;

巡线机器人.pdf
本发明公开了一种巡线机器人,属于特种机器人领域,旨在提供一种速度平稳、能够灵活地跨越高压线路上的障碍、体积小、重量轻和耗电省的巡线机器人。它由三个机器人单体构成,所述的机器人单体包括机械轮式行走机构和越障机构,所述的机械轮式行走机构和越障机构通过上连接板进行连接,所述的控制装置固定在机架下板上,所述的避障机构固联在机架上。本发明增加机械轮式机构使巡线机器人在高压线上平稳运行,同时具有一定的爬坡能力,增加丝杆避障机构可以使巡线机器人能够较灵活地跨越高压线路上的障碍。

电力线除冰机器人用除冰刀.pdf
本发明公开了一种电力线除冰机器人用除冰刀,包括可固定在除冰机器人上的固定板和移动块,固定板下表面上两端分别垂直设有支撑座,两支撑座相平行设置且为板状,两支撑座间设有丝杠和导杆,丝杠两端分别转动设在两支撑座上,导杆两端分别固定设在两支撑座上,导杆与丝杠相平行,丝杠一端与第一驱动机构输出轴相连,移动块上设有可供丝杠穿过的螺孔和可供导杆穿过的孔,移动块下部左右侧分别设有轴孔,轴孔内设有转轴,一转轴上固定设有第一刀具固定架和主动齿轮,另一转轴上固定设有第二刀具固定架和从动齿轮,第一刀具固定架上设有第一刀具,第二刀

架空线除冰机器人的除冰机构.pdf
本发明公开了一种架空线除冰机器人的除冰机构,安装于架空线除冰机器人的前端,其特征在于,在所述的除冰机构的前端设有冰刀底座,在所述的冰刀底座上安装有用于在架空线除冰机器人推进过程中进行除冰的组合冰刀。所述的架空线除冰机器人的除冰机构还包括破冰锥套、安装于破冰锥套内的可伸缩的破冰锥、破冰锥底座、凸轮、弹簧和破冰电机。该除冰机构结构简单、实用,安装、拆卸和更换都方便,可适应不同覆冰程度的架空线,除冰效果好。