
具有双足步行与轮式移动互变功能的仿人机器人.pdf

努力****星驰


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

具有双足步行与轮式移动互变功能的仿人机器人.pdf
具有双足步行与轮式移动互变功能的仿人机器人,包括:机器人本体,由驱动器和控制器组成,驱动器通过总线连接控制器,接受控制器输出的驱动控制信号;遥控设备通过无线通讯方式与机器人本体的控制器连接;测距传感器通过总线与机器人本体的控制器相连。本发明所提供的机器人,是仿人机器人与轮式机器人的结合,不仅可以遥控机器人改变当前形态,而且可以通过安装在机器人本体上的测距传感器,监测前方地形特征,根据地面环境和操作任务的需要,自主选择最佳的移动方式,提高机器人的环境适应性和工作效率。
一种具有双足步行与轮式移动转换功能的机器人运动机构.pdf
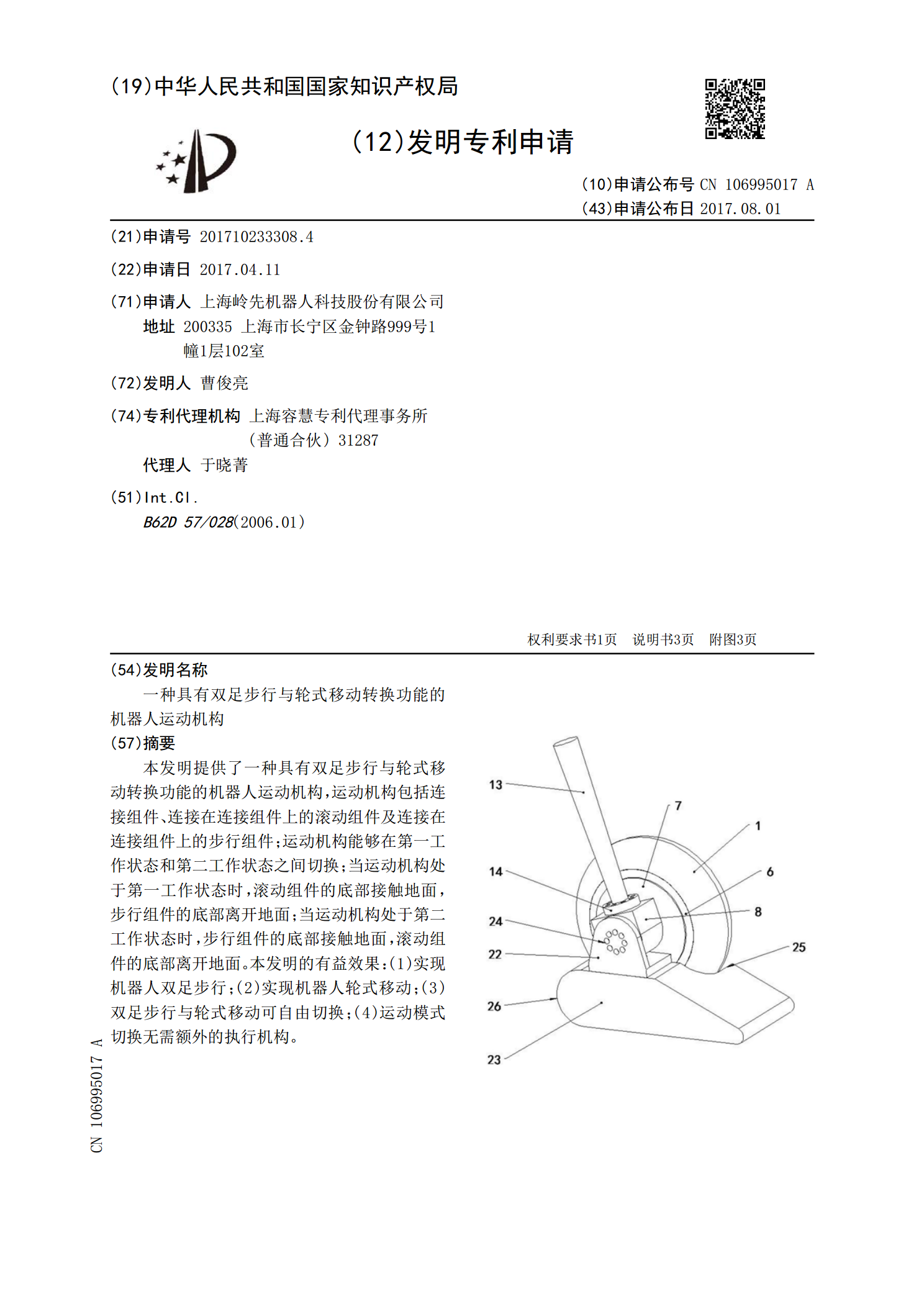
本发明提供了一种具有双足步行与轮式移动转换功能的机器人运动机构,运动机构包括连接组件、连接在连接组件上的滚动组件及连接在连接组件上的步行组件;运动机构能够在第一工作状态和第二工作状态之间切换;当运动机构处于第一工作状态时,滚动组件的底部接触地面,步行组件的底部离开地面;当运动机构处于第二工作状态时,步行组件的底部接触地面,滚动组件的底部离开地面。本发明的有益效果:(1)实现机器人双足步行;(2)实现机器人轮式移动;(3)双足步行与轮式移动可自由切换;(4)运动模式切换无需额外的执行机构。

具有越障功能的双足机器人.pdf
本发明公开了一种具有越障功能的双足机器人,包括行走装置和越障装置,所述行走装置包括竖直设置的机架、设于所述机架内的电机、连接于所述电机上的输出齿轮、以及与所述输出齿轮相啮合的传动齿轮,所述传动齿轮中心设有传动轴,所述传动轴安装于轴架上,所述传动轴的两端各安装一个沿其径向延伸的曲柄,所述曲柄的另一端垂直向外延伸有转轴,所述机架的两外侧边位于转轴上方处向外延伸有支撑轴,所述转轴和支撑轴位于同一竖直平面上,两个所述曲柄的转动角相差180°。本发明行走灵活,并具备越障功能,使用广泛,具有实用性。

一种变拓扑辐条步行双足机器人.pdf
本发明公开了一种变拓扑辐条步行双足机器人,包括左右轮足组件、左右小腿组件、左右大腿组件以及髋关节组件;左右轮足组件分别连接在左右小腿组件的下端,左右小腿组件连接在左右大腿组件的下部,左右大腿组件的上端与髋关节组件相连接;左右轮足组件中分别设置有一个可转动的主体,在该主体中穿设有三根呈60°间隔分布的轮辐,且每根轮辐均可沿其长度方向来回移动,用于在其落地前,可根据落地点的路况需要,伸缩相应的轮辐;由于采用了三根呈60°间隔分布且可沿其长度方向来回移动的轮辐,结合双足机器人的腿部形成了独特的移动性,提高了双足

轮式升降型双足轮式机器人.pdf
本发明提供一种轮式升降型双足轮式运动机构,包括底盘与滚轮,其特征在于:所述滚轮嵌置于底盘内部,底盘内设置升降通道;所述滚轮与升降机构连接,在升降机构的带动下,滚轮沿底盘内的升降通道下降伸出底盘下部或上升至底盘内部,实现足式与轮式切换。采用双足轮式运动机构的机器人的双足步行移动方式,具有很高的灵活性,轮式移动方式,在平坦路面具有移动速度快、稳定性好的优点,而且能够实现在双足步行与轮式移动两种移动形式之间平稳切换,轮式方式与足式方式互不影响,大大提高了机器人的环境适应性和工作效率。