
一种用于线激光扫描视觉测量系统的光带中心线提取方法.pdf

盼易****君a


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种用于线激光扫描视觉测量系统的光带中心线提取方法.pdf
本发明公开了一种用于线激光扫描视觉测量系统的光带中心线提取方法,通过CCD相机获取原始光带灰度位图,获取光带轮廓线,划分为外轮廓线和从属的内轮廓线;按逆时针排序方式存储为树形链表结构;判断外轮廓线是否有从属的内轮廓线,如果有,对从属的内轮廓线进行光带轮廓多边形表示;如果否,对外轮廓线进行光带轮廓多边形表示,基于树形链表结构遍历所有光带轮廓线C,将有光带轮廓多边形表示的光带轮廓线C记为特征轮廓线;在光带轮廓多边形中任意选择相邻的两点,通过两点确定扫描线,在扫描线上获取光带中心的亚像素坐标,遍历特征轮廓线上的

用于自动肋骨中心线提取的方法和系统.pdf
本发明涉及用于自动肋骨中心线提取的方法和系统。公开了一种用于在3D体积(比如3D计算机断层摄影(CT)体积)中提取肋骨中心线的方法和系统。利用基于学习的检测器在所述3D体积中检测肋骨中心线体素。随后通过基于所检测到的肋骨中心线体素将对于整个肋骨篮的肋骨中心线的模板与所述3D体积相匹配提取出对于整个肋骨篮的肋骨中心线。随后利用主动轮廓模型单独细化每一条所提取出的肋骨中心线。
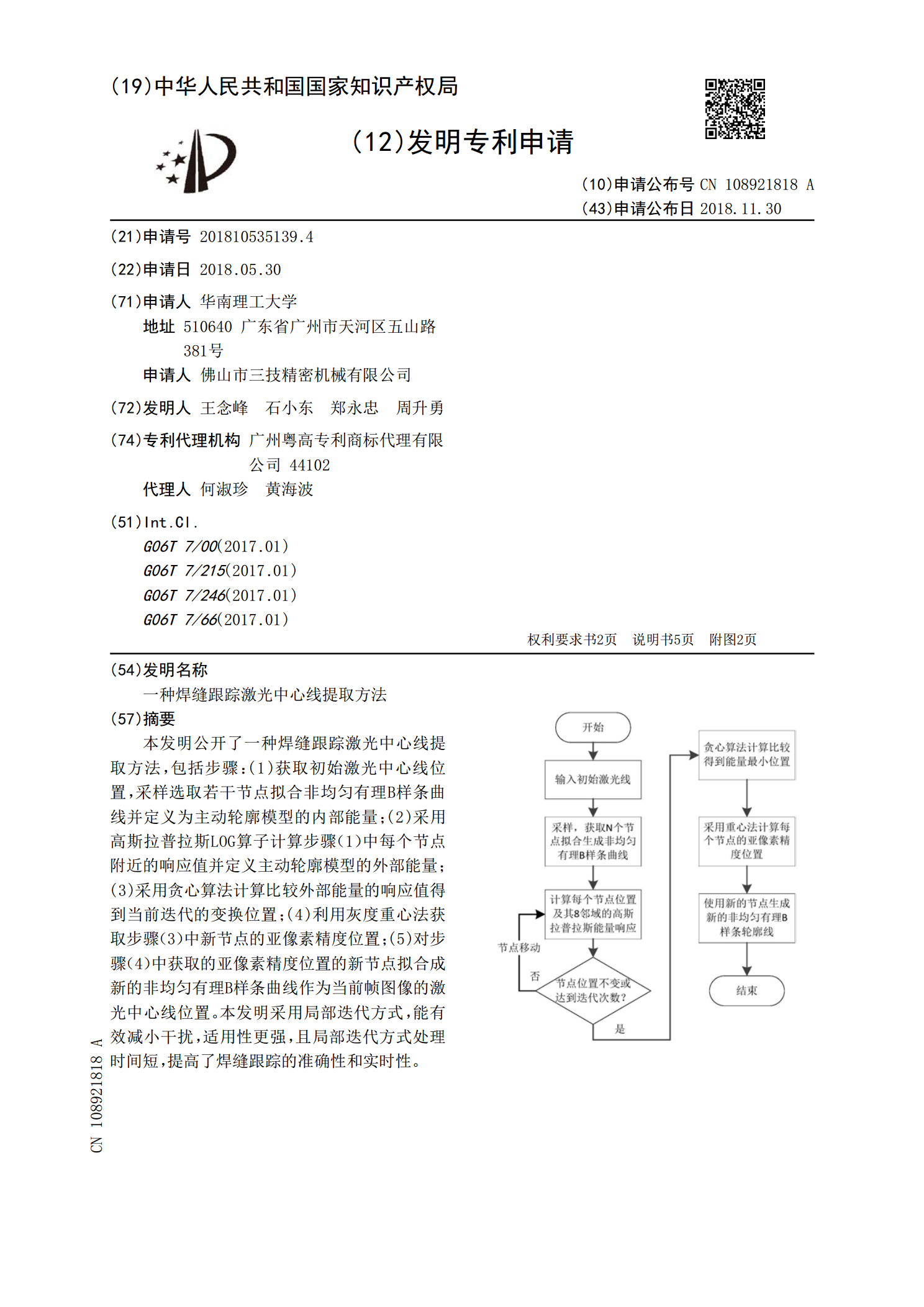
一种焊缝跟踪激光中心线提取方法.pdf
本发明公开了一种焊缝跟踪激光中心线提取方法,包括步骤:(1)获取初始激光中心线位置,采样选取若干节点拟合非均匀有理B样条曲线并定义为主动轮廓模型的内部能量;(2)采用高斯拉普拉斯LOG算子计算步骤(1)中每个节点附近的响应值并定义主动轮廓模型的外部能量;(3)采用贪心算法计算比较外部能量的响应值得到当前迭代的变换位置;(4)利用灰度重心法获取步骤(3)中新节点的亚像素精度位置;(5)对步骤(4)中获取的亚像素精度位置的新节点拟合成新的非均匀有理B样条曲线作为当前帧图像的激光中心线位置。本发明采用局部迭代方
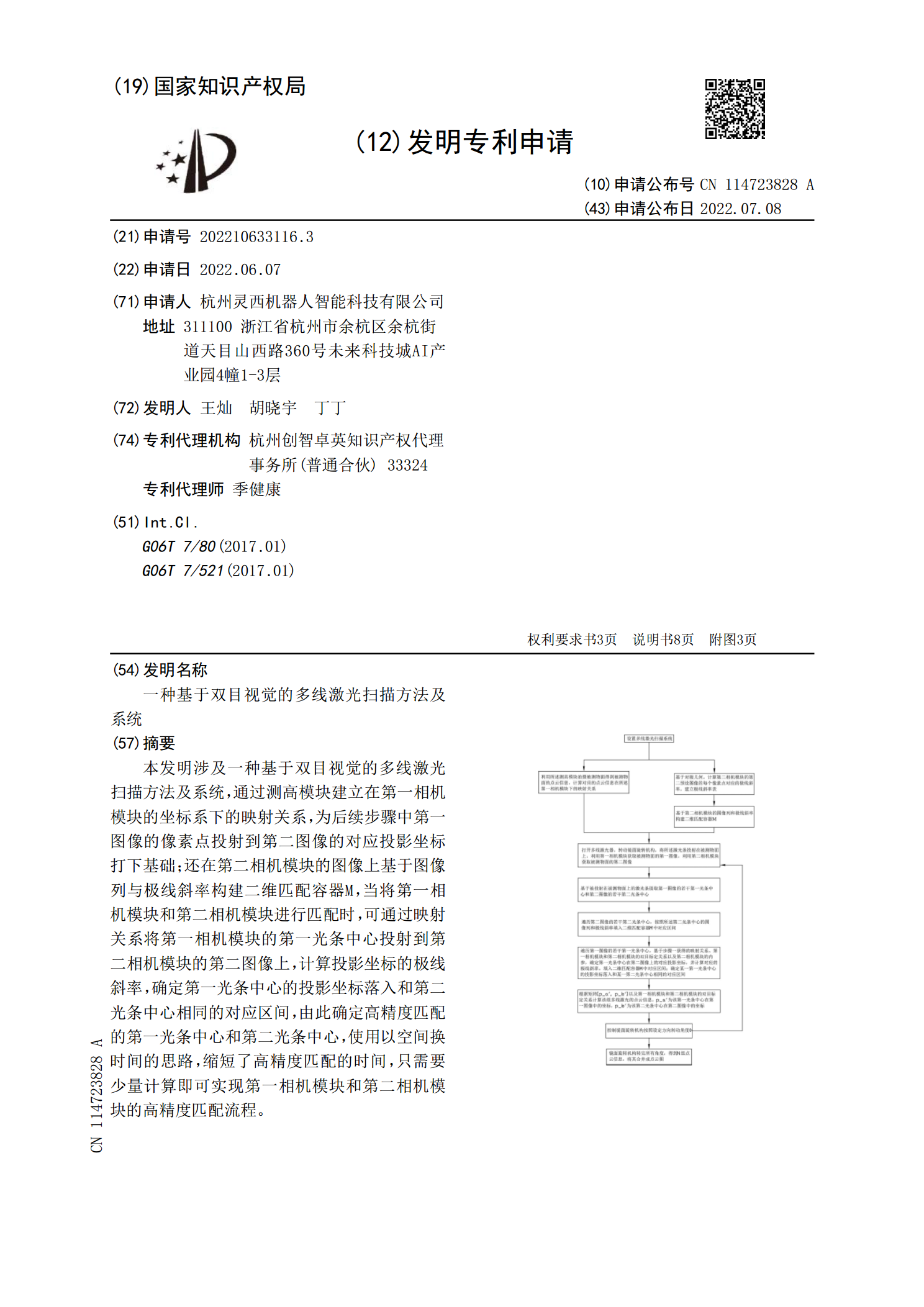
一种基于双目视觉的多线激光扫描方法及系统.pdf
本发明涉及一种基于双目视觉的多线激光扫描方法及系统,通过测高模块建立在第一相机模块的坐标系下的映射关系,为后续步骤中第一图像的像素点投射到第二图像的对应投影坐标打下基础;还在第二相机模块的图像上基于图像列与极线斜率构建二维匹配容器M,当将第一相机模块和第二相机模块进行匹配时,可通过映射关系将第一相机模块的第一光条中心投射到第二相机模块的第二图像上,计算投影坐标的极线斜率,确定第一光条中心的投影坐标落入和第二光条中心相同的对应区间,由此确定高精度匹配的第一光条中心和第二光条中心,使用以空间换时间的思路,缩短
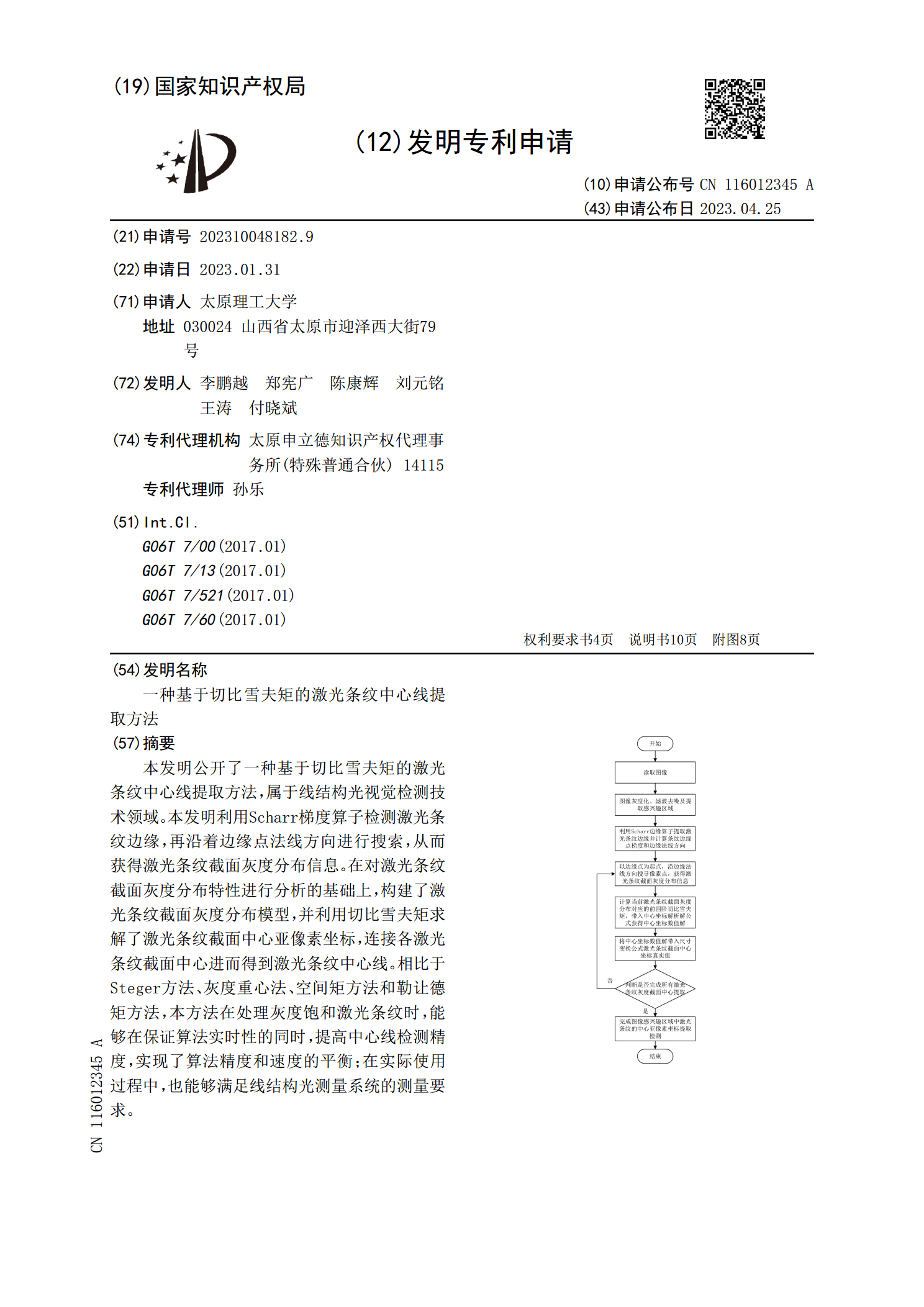
一种基于切比雪夫矩的激光条纹中心线提取方法.pdf
本发明公开了一种基于切比雪夫矩的激光条纹中心线提取方法,属于线结构光视觉检测技术领域。本发明利用Scharr梯度算子检测激光条纹边缘,再沿着边缘点法线方向进行搜索,从而获得激光条纹截面灰度分布信息。在对激光条纹截面灰度分布特性进行分析的基础上,构建了激光条纹截面灰度分布模型,并利用切比雪夫矩求解了激光条纹截面中心亚像素坐标,连接各激光条纹截面中心进而得到激光条纹中心线。相比于Steger方法、灰度重心法、空间矩方法和勒让德矩方法,本方法在处理灰度饱和激光条纹时,能够在保证算法实时性的同时,提高中心线检测精