
一种焊缝跟踪激光中心线提取方法.pdf

傲丝****账号

1/10

2/10

3/10
4/10
5/10

6/10

7/10
8/10
9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种焊缝跟踪激光中心线提取方法.pdf
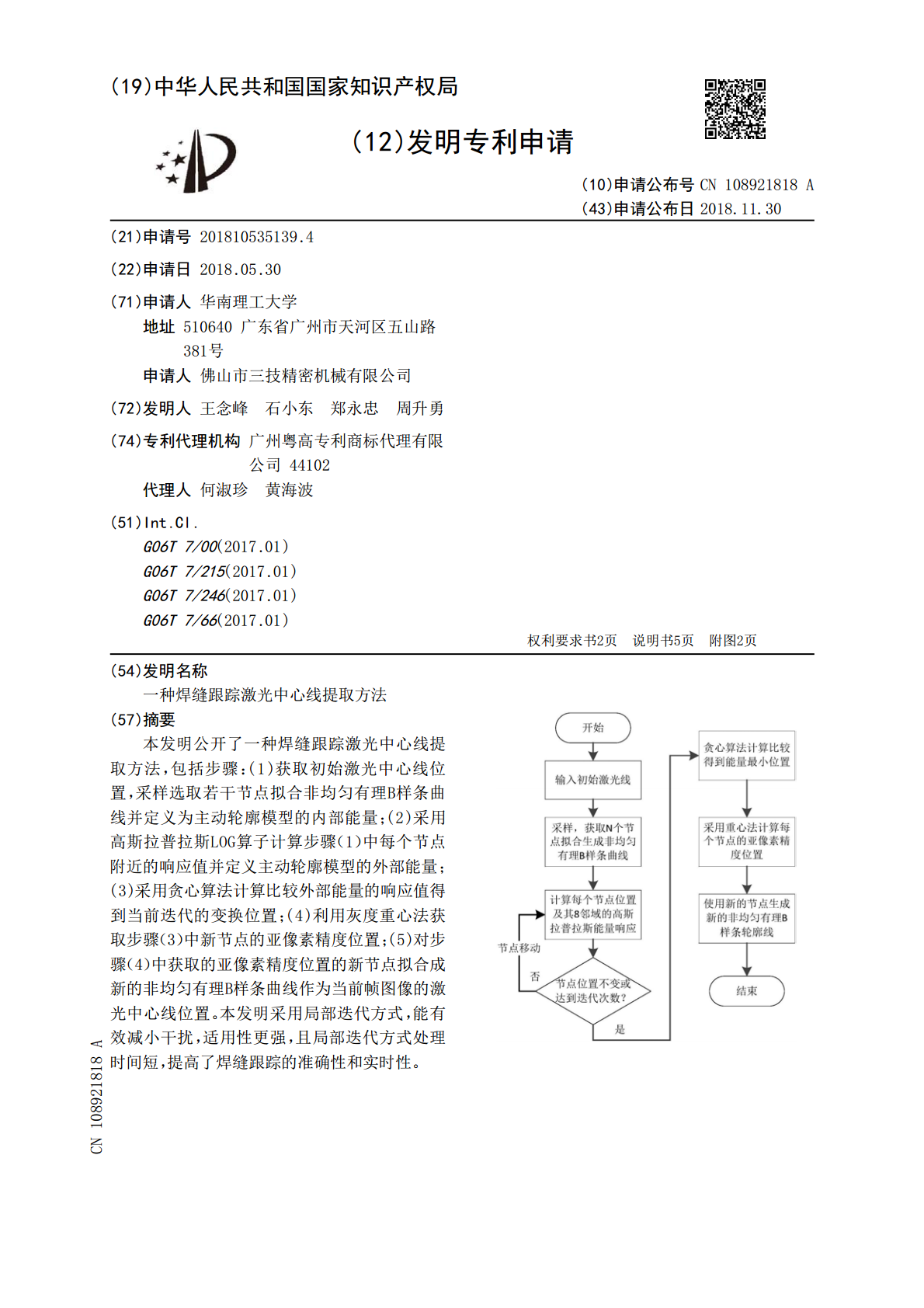
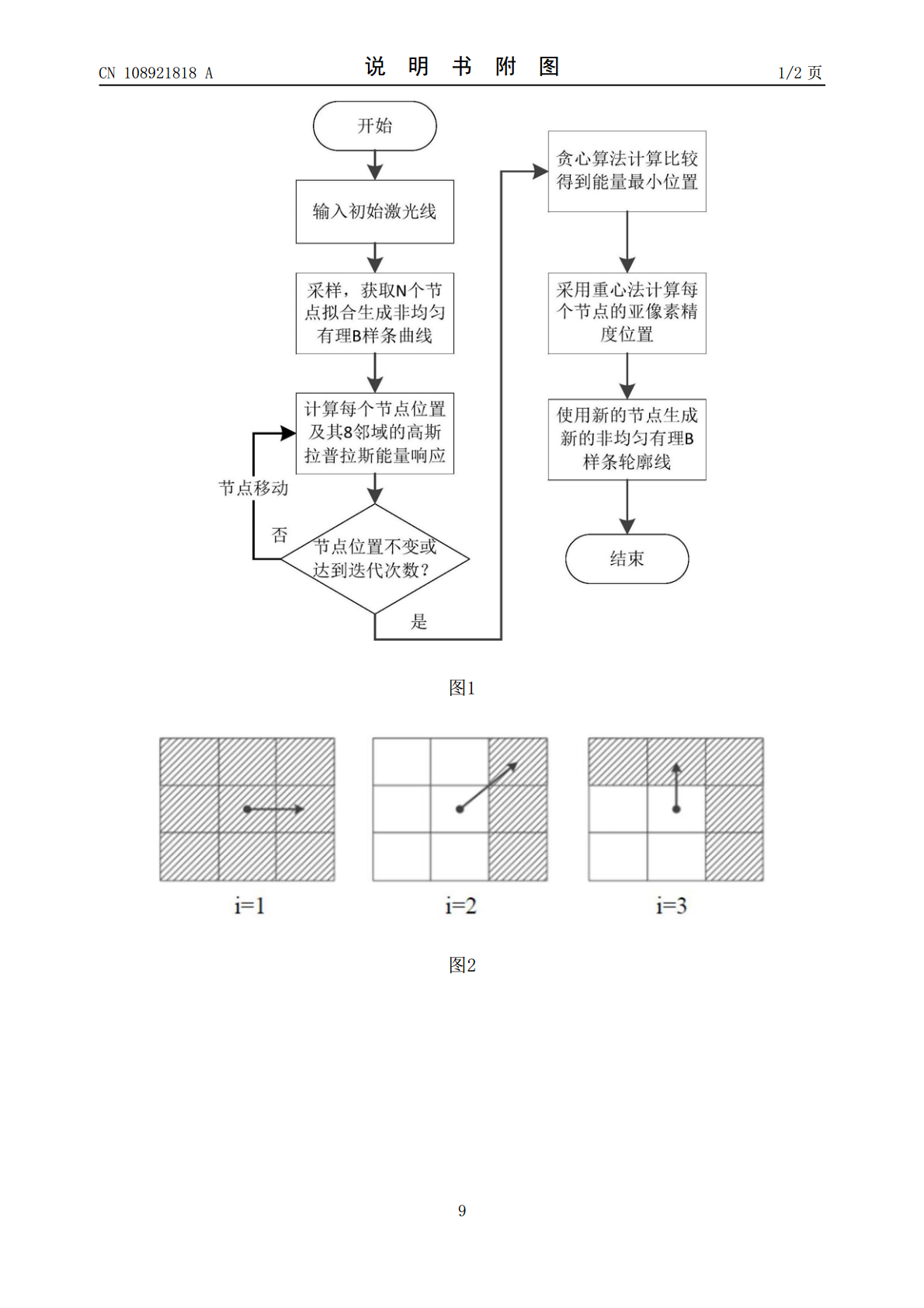
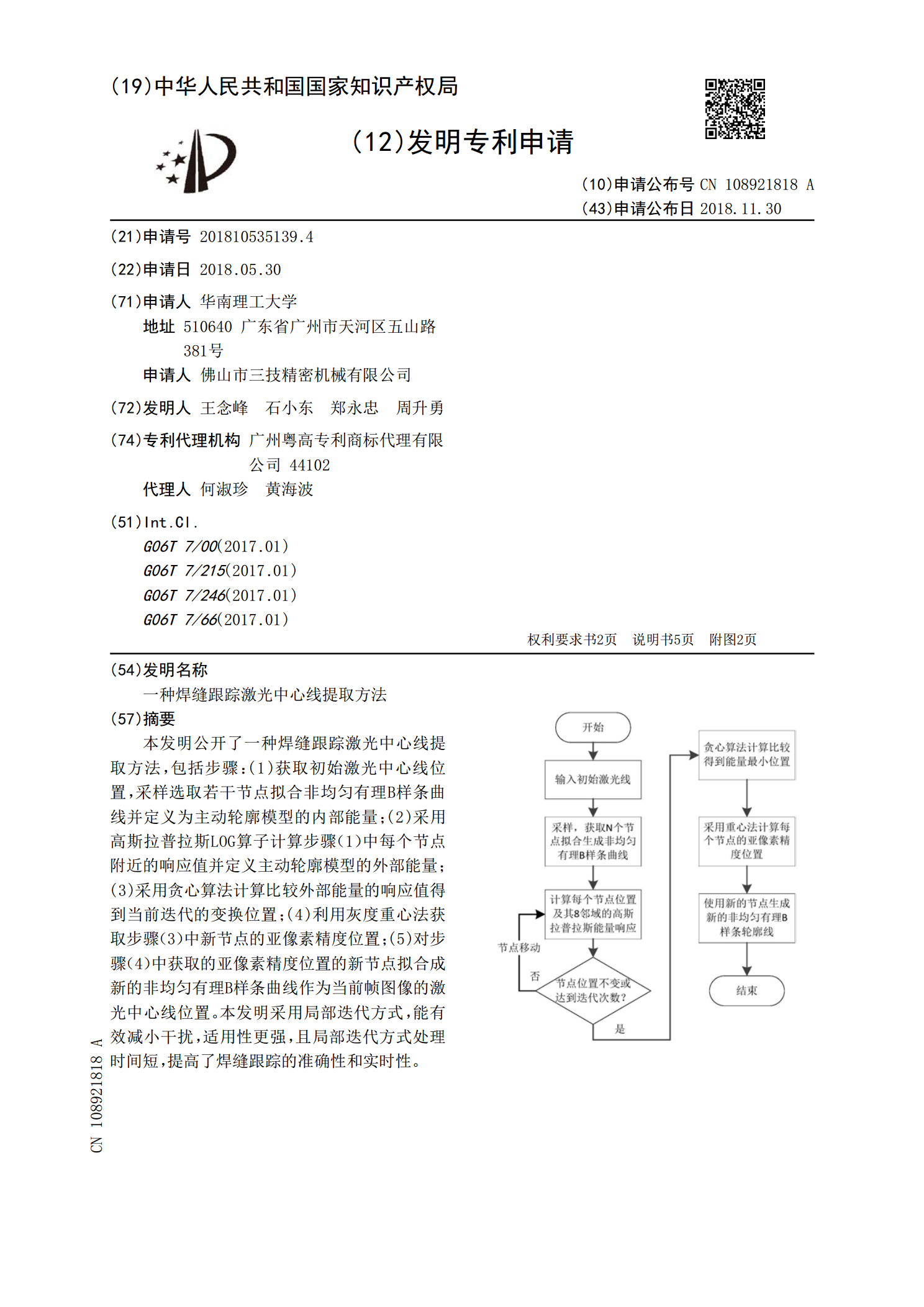
本发明公开了一种焊缝跟踪激光中心线提取方法,包括步骤:(1)获取初始激光中心线位置,采样选取若干节点拟合非均匀有理B样条曲线并定义为主动轮廓模型的内部能量;(2)采用高斯拉普拉斯LOG算子计算步骤(1)中每个节点附近的响应值并定义主动轮廓模型的外部能量;(3)采用贪心算法计算比较外部能量的响应值得到当前迭代的变换位置;(4)利用灰度重心法获取步骤(3)中新节点的亚像素精度位置;(5)对步骤(4)中获取的亚像素精度位置的新节点拟合成新的非均匀有理B样条曲线作为当前帧图像的激光中心线位置。本发明采用局部迭代方

一种提取焊缝中心线的方法.pdf
本发明涉及一种提取焊缝中心线的方法,包括:获取焊缝的原始图像;对所述原始图像进行同态滤波,获得削弱光照影响的灰度图像;对所述灰度图像进行局部阈值二值化处理得到二值图像;对局部阈值二值化处理后的二值图像进行形态学操作;将处理后的二值图像进行连通域处理,提取最大连通域,得仅保留焊缝的二值图像;使用距离变换函数将二值图像变换为凸显出焊缝中心线的灰度图像;对处理得到的灰度图像进行局部阈值二值化处理,得到保留焊缝中心线的二值图像;对处理得到的保留焊缝中心线的二值图像进行形态学处理和连通域处理,提取焊缝中心线。本发明
一种激光焊缝跟踪装置.pdf
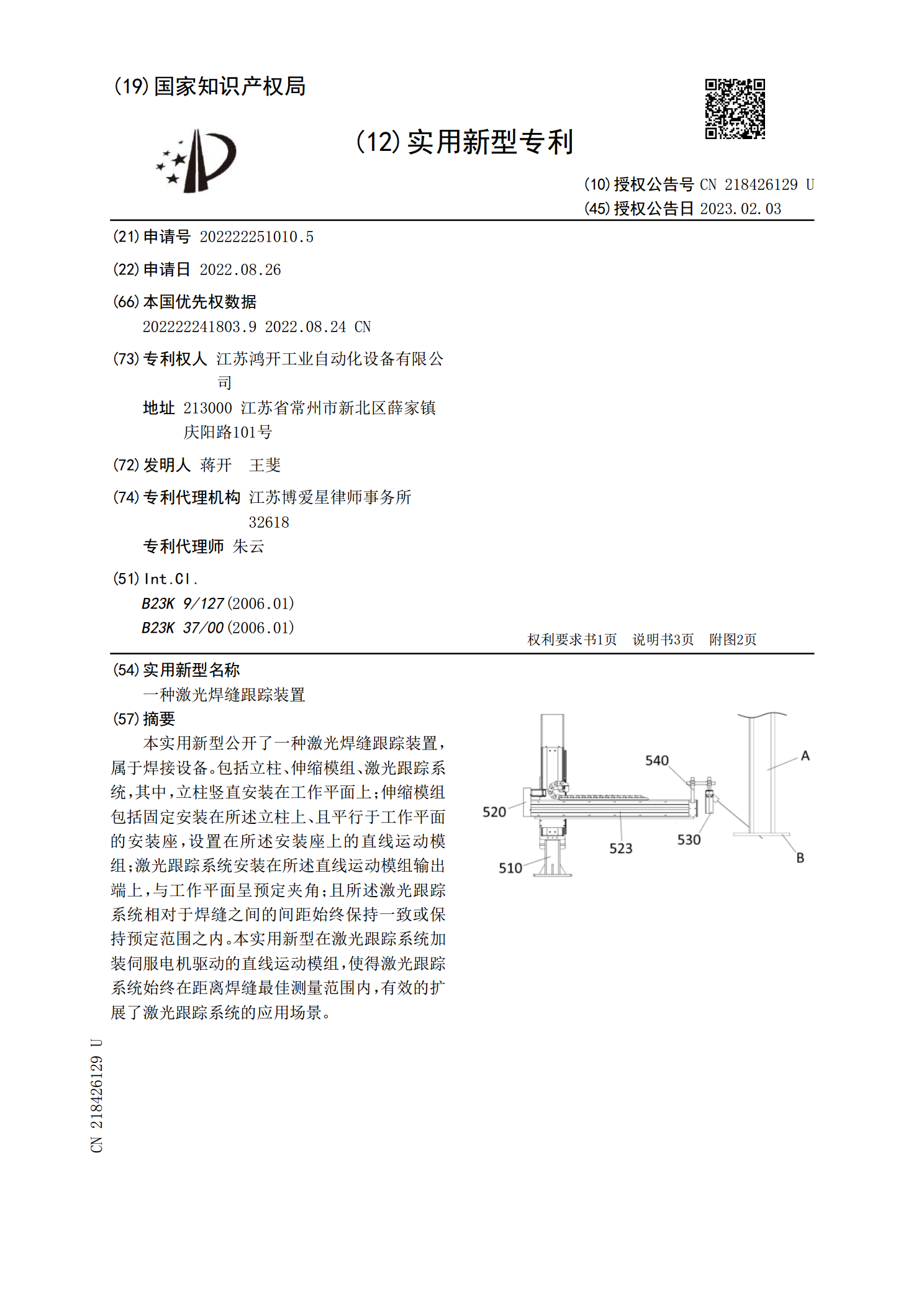
本实用新型公开了一种激光焊缝跟踪装置,属于焊接设备。包括立柱、伸缩模组、激光跟踪系统,其中,立柱竖直安装在工作平面上;伸缩模组包括固定安装在所述立柱上、且平行于工作平面的安装座,设置在所述安装座上的直线运动模组;激光跟踪系统安装在所述直线运动模组输出端上,与工作平面呈预定夹角;且所述激光跟踪系统相对于焊缝之间的间距始终保持一致或保持预定范围之内。本实用新型在激光跟踪系统加装伺服电机驱动的直线运动模组,使得激光跟踪系统始终在距离焊缝最佳测量范围内,有效的扩展了激光跟踪系统的应用场景。
一种基于激光视觉的焊缝跟踪图像处理方法.pdf
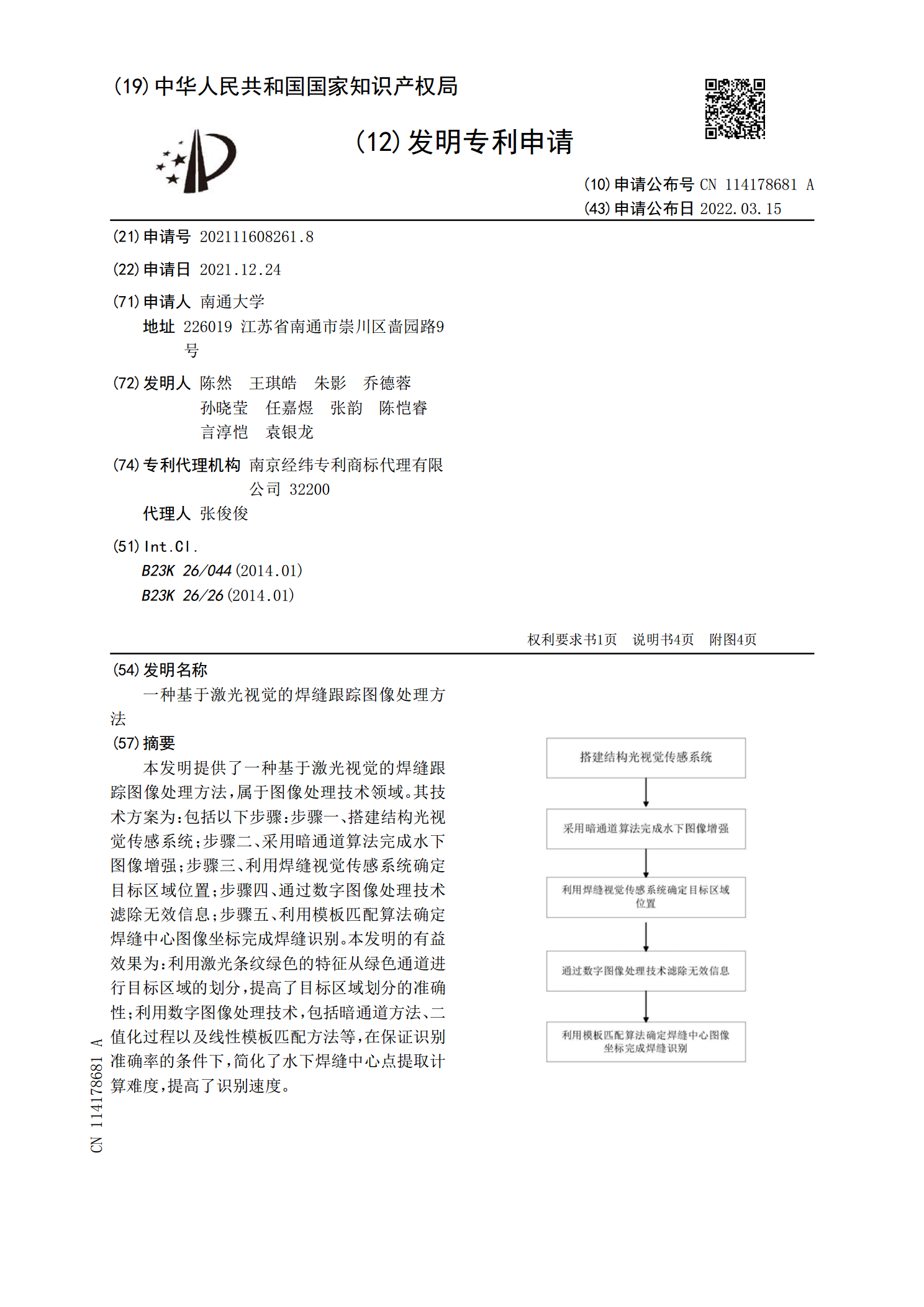
本发明提供了一种基于激光视觉的焊缝跟踪图像处理方法,属于图像处理技术领域。其技术方案为:包括以下步骤:步骤一、搭建结构光视觉传感系统;步骤二、采用暗通道算法完成水下图像增强;步骤三、利用焊缝视觉传感系统确定目标区域位置;步骤四、通过数字图像处理技术滤除无效信息;步骤五、利用模板匹配算法确定焊缝中心图像坐标完成焊缝识别。本发明的有益效果为:利用激光条纹绿色的特征从绿色通道进行目标区域的划分,提高了目标区域划分的准确性;利用数字图像处理技术,包括暗通道方法、二值化过程以及线性模板匹配方法等,在保证识别准确率的

一种基于焊缝特征的焊缝中心线信息获取方法.docx
一种基于焊缝特征的焊缝中心线信息获取方法标题:一种基于焊缝特征的焊缝中心线信息获取方法摘要:在现代制造业中,焊接是一种常见且重要的连接技术。对焊缝的质量检测和分析,特别是焊缝中心线的准确定位和提取,对于焊接工艺控制和焊缝质量评估具有重要意义。本文提出了一种基于焊缝特征的焊缝中心线信息获取方法。该方法可以通过灰度图像分析和几何特征提取来定位焊缝中心线,并通过优化算法实现焊缝中心线的提取和重建。实验结果验证了该方法的有效性和鲁棒性。1.引言焊接技术是一种常见的连接技术,在汽车制造、船舶建造、航空航天等领域得到