
磁导航自主轮式移动机器人的里程检测方法.pdf

一条****淑淑


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

磁导航自主轮式移动机器人的里程检测方法.pdf
本发明公开了一种磁导航自主轮式移动机器人的里程检测方法,包括以下步骤:步骤1:确定磁条或磁道钉的铺设间距L;步骤2:记录机器人在前进过程中,前后两排磁传感器组不能检测磁场的次数N1,N2;步骤3:通过以下里程计算公式计算出机器人当前的里程s:或式中,A表示磁条的长度,R表示磁道钉的半径,本发明通过科学设定磁道钉或磁条的铺设间隔,得到磁道钉或磁条磁场间的空隙,然后通过记录前后两排磁传感器组不能读到磁场的次数,并结合磁条或磁道钉的铺设间隔长度实现对机器人里程的检测,该方法计算简单、相对准确、不受外部环境影响,

基于IHDR自主学习框架的轮式移动机器人导航方法.pdf
本发明涉及一种基于IHDR自主学习框架的轮式移动机器人导航方法。包括以下步骤:首先指导机器人移动,在此过程中机器人通过kinect传感器和手柄控制量实时采集当前时刻的图像信息和速度值;然后利用IHDR算法建立一种图像输入、速度值输出的映射关系,并将采集到的大量数据以“知识”树状结构的形式存放在机器人中;最后在无人干预的条件下,机器人可以根据当前的图像信息,去检索知识库,从而实现自主导航。该方法可以使得机器人具备跟人一样的思维方式,体现了一种认知能力,而非传统的通过数学模型的方式去导航,智能化程度更高。
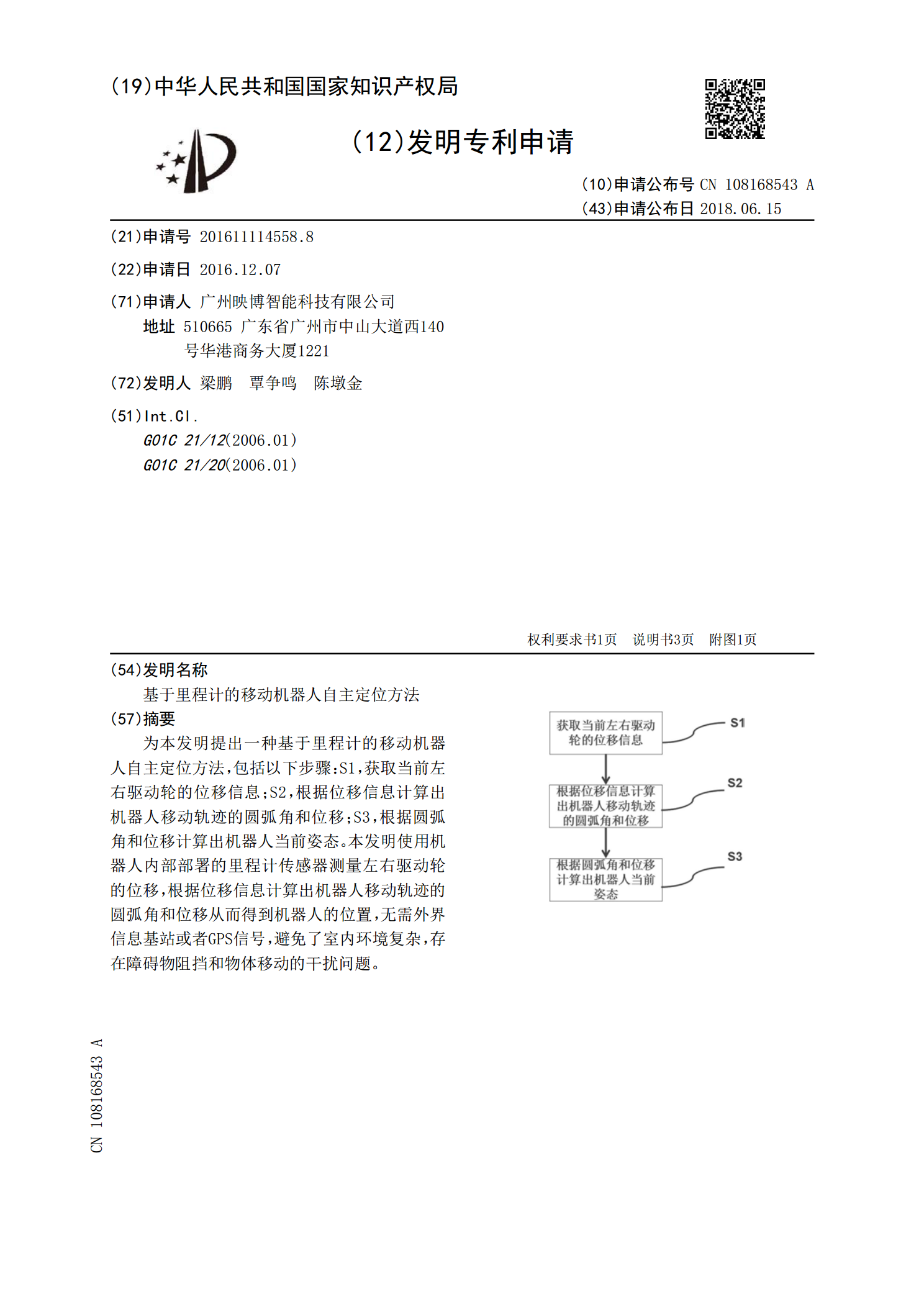
基于里程计的移动机器人自主定位方法.pdf
为本发明提出一种基于里程计的移动机器人自主定位方法,包括以下步骤:S1,获取当前左右驱动轮的位移信息;S2,根据位移信息计算出机器人移动轨迹的圆弧角和位移;S3,根据圆弧角和位移计算出机器人当前姿态。本发明使用机器人内部部署的里程计传感器测量左右驱动轮的位移,根据位移信息计算出机器人移动轨迹的圆弧角和位移从而得到机器人的位置,无需外界信息基站或者GPS信号,避免了室内环境复杂,存在障碍物阻挡和物体移动的干扰问题。

户外自主轮式机器人磁导航系统研究的任务书.docx
户外自主轮式机器人磁导航系统研究的任务书任务书一、任务简介随着智能化和自动化技术的不断发展,机器人逐渐成为生产和生活中不可或缺的一部分。在户外环境下,我们可以选择使用自主轮式机器人,使其能够自主地执行预定的任务并携带我们的负载。而磁导航系统就是其中一种适用于户外环境下的自主导航技术,它可以帮助机器人避免地形的障碍和其他物体,从而保护机器人和其负载的安全性。本次研究旨在进一步探讨如何在自主轮式机器人中使用磁导航系统,并建立一个完整的系统,使机器人可以更加准确、快速地进行轨迹规划和导航,以实现更好的工作效率和
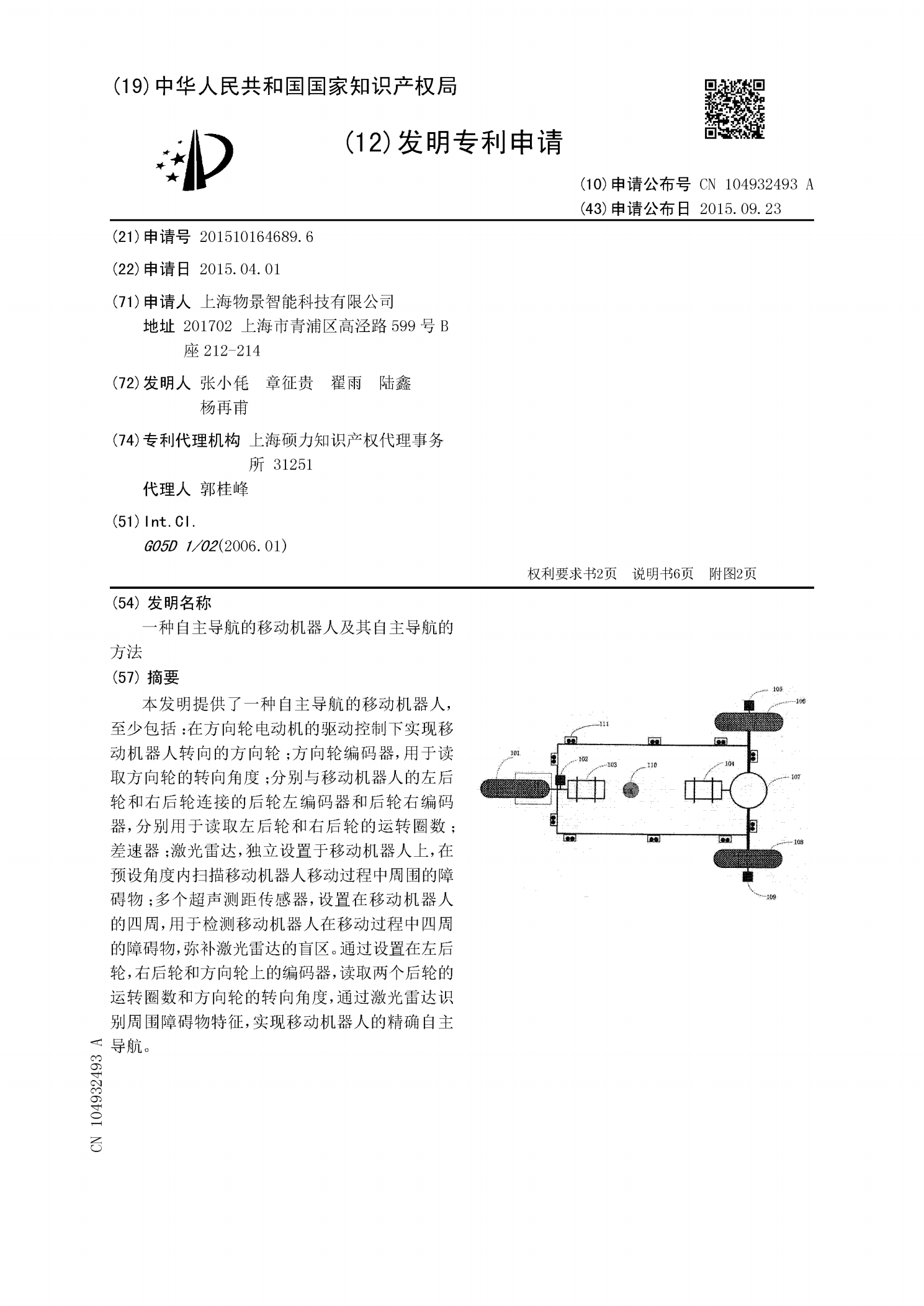
一种自主导航的移动机器人及其自主导航的方法.pdf
本发明提供了一种自主导航的移动机器人,至少包括:在方向轮电动机的驱动控制下实现移动机器人转向的方向轮;方向轮编码器,用于读取方向轮的转向角度;分别与移动机器人的左后轮和右后轮连接的后轮左编码器和后轮右编码器,分别用于读取左后轮和右后轮的运转圈数;差速器;激光雷达,独立设置于移动机器人上,在预设角度内扫描移动机器人移动过程中周围的障碍物;多个超声测距传感器,设置在移动机器人的四周,用于检测移动机器人在移动过程中四周的障碍物,弥补激光雷达的盲区。通过设置在左后轮,右后轮和方向轮上的编码器,读取两个后轮的运转圈