
一种自主导航的移动机器人及其自主导航的方法.pdf

念珊****写意

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种自主导航的移动机器人及其自主导航的方法.pdf
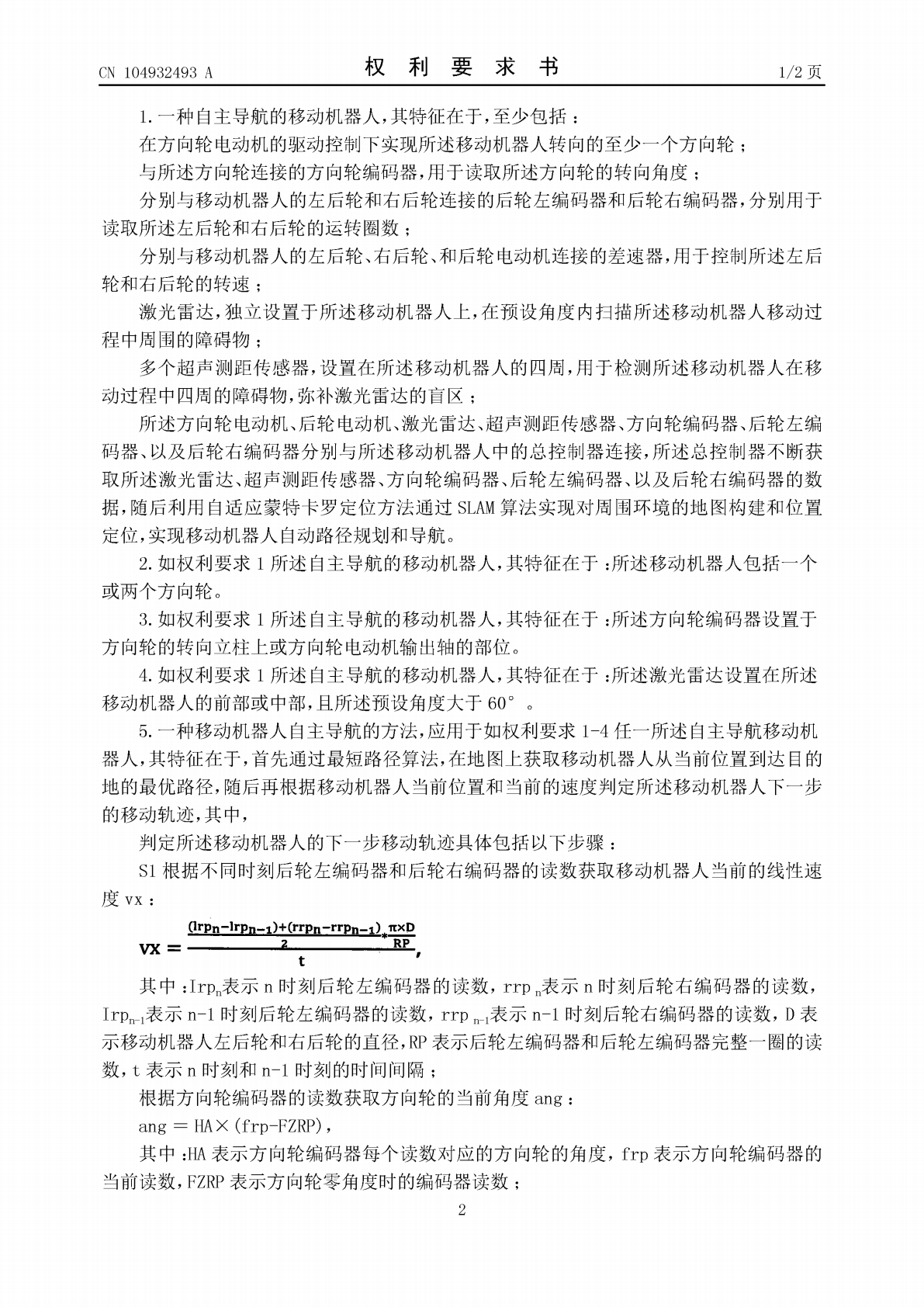
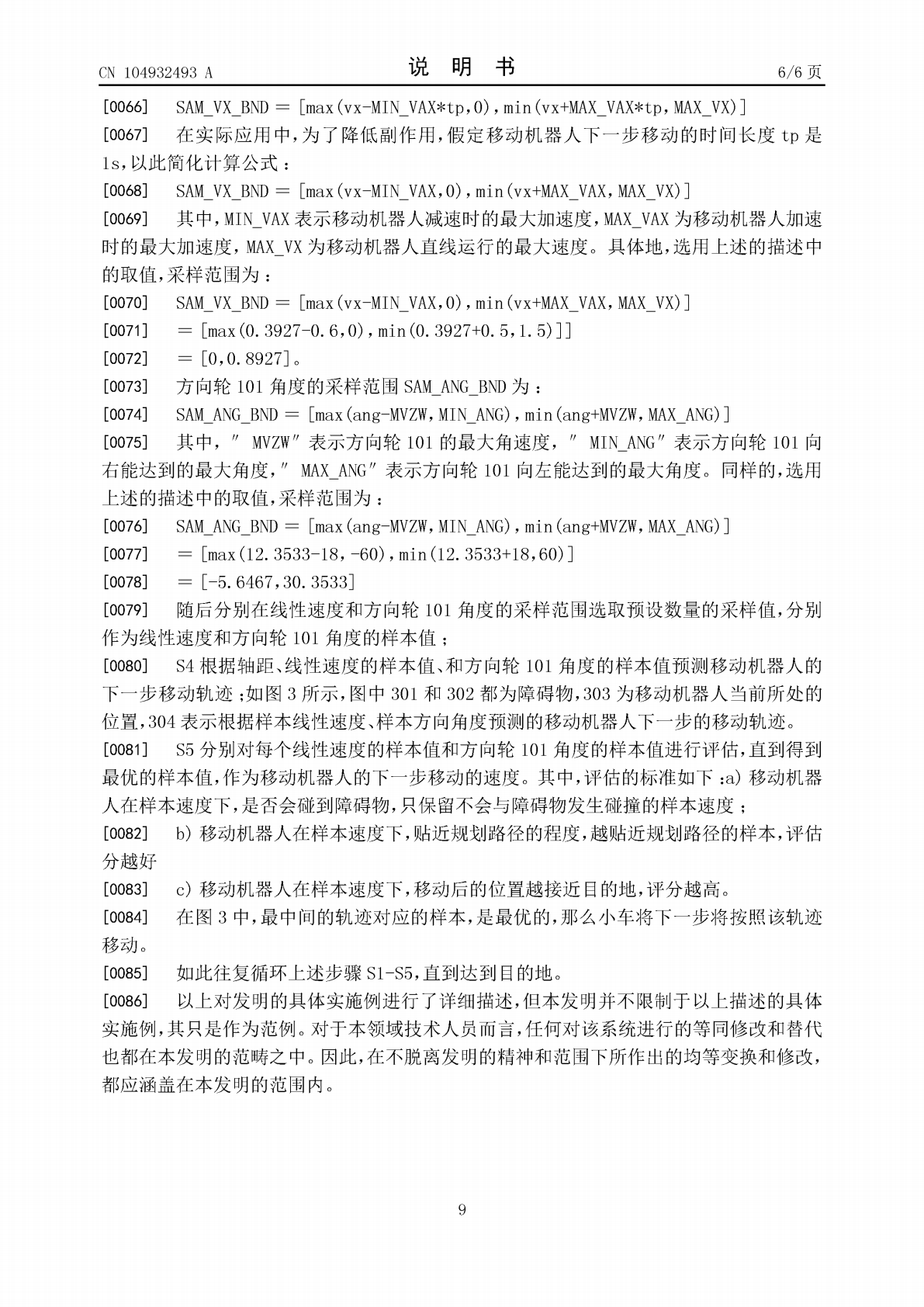
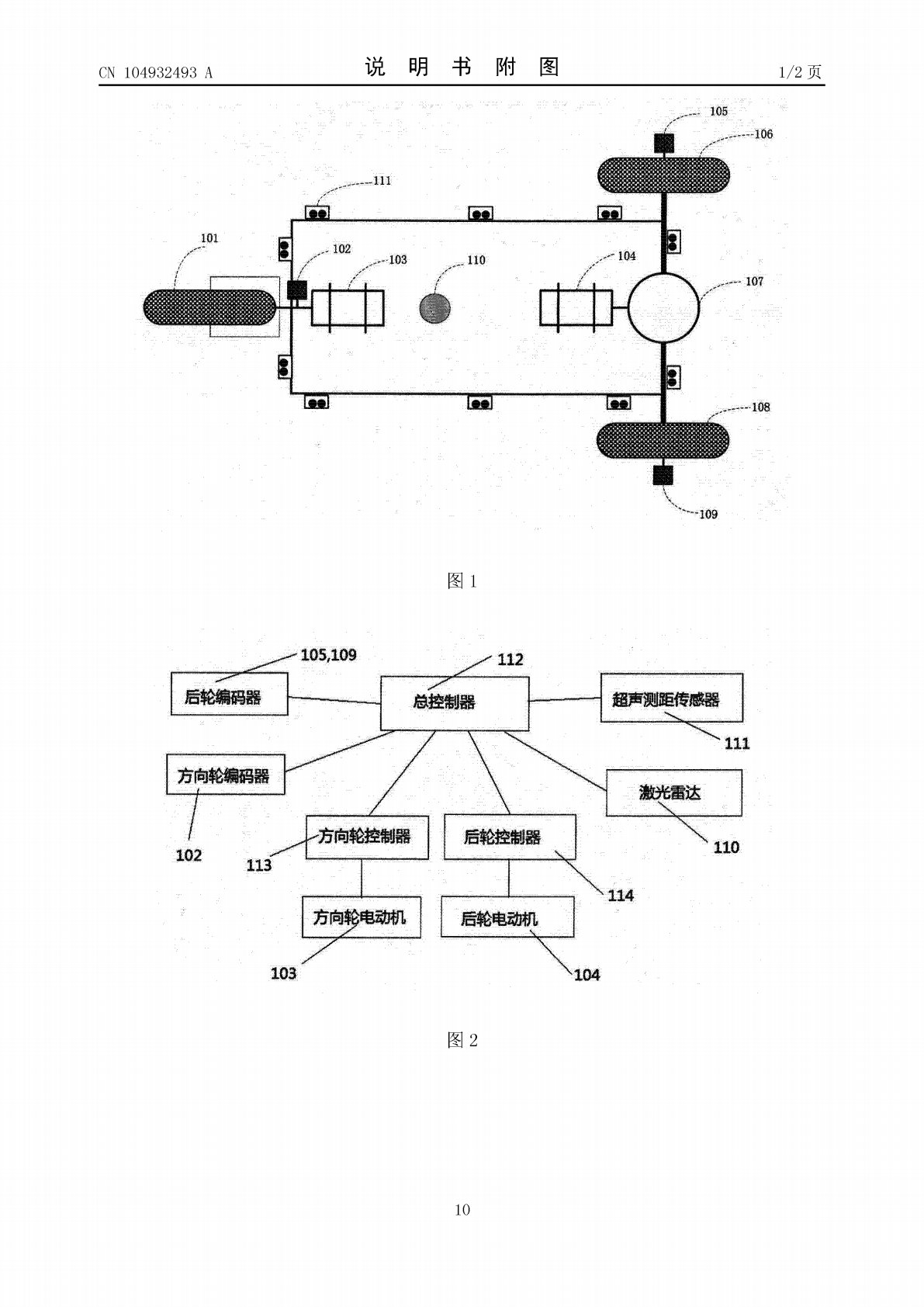
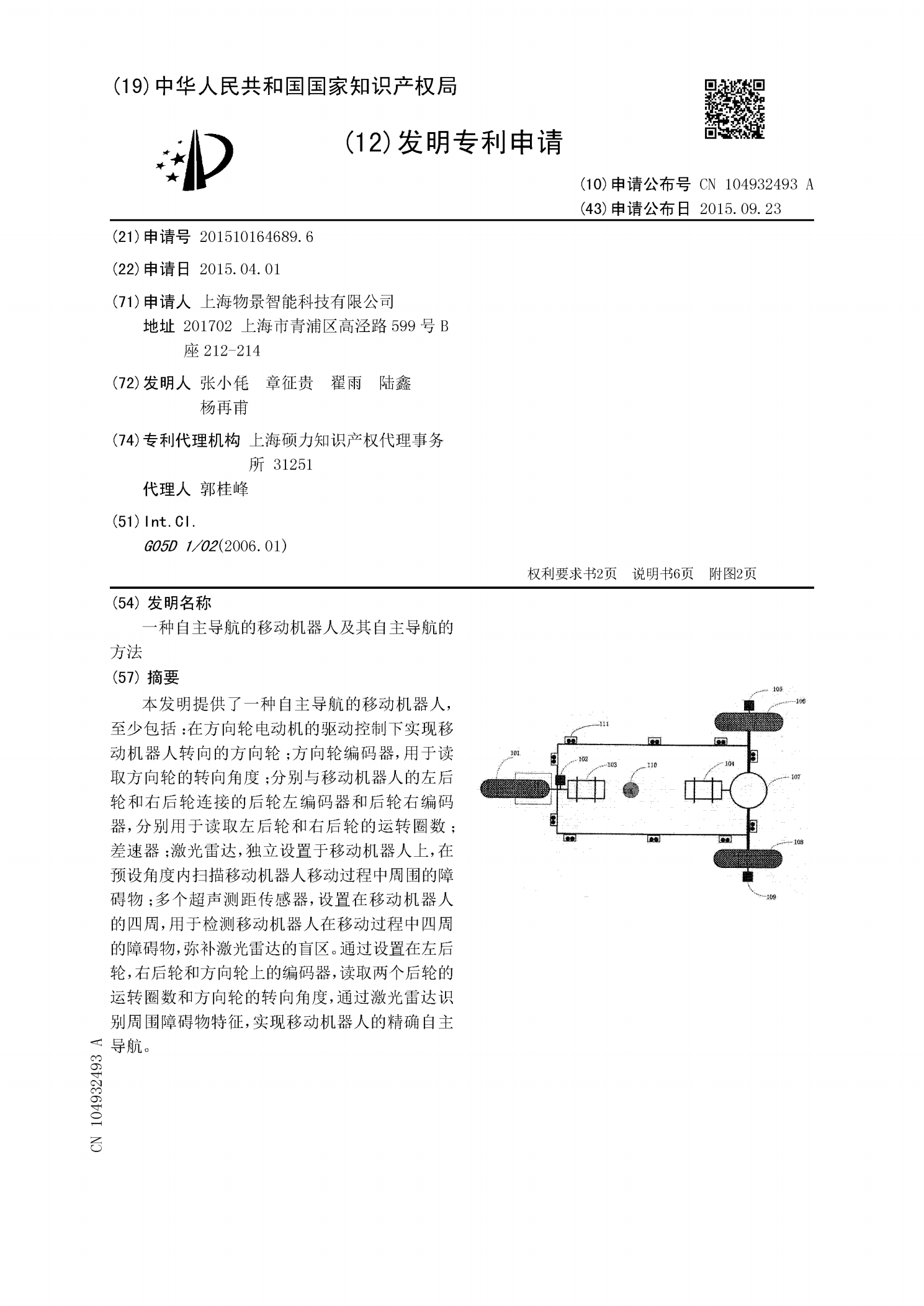
本发明提供了一种自主导航的移动机器人,至少包括:在方向轮电动机的驱动控制下实现移动机器人转向的方向轮;方向轮编码器,用于读取方向轮的转向角度;分别与移动机器人的左后轮和右后轮连接的后轮左编码器和后轮右编码器,分别用于读取左后轮和右后轮的运转圈数;差速器;激光雷达,独立设置于移动机器人上,在预设角度内扫描移动机器人移动过程中周围的障碍物;多个超声测距传感器,设置在移动机器人的四周,用于检测移动机器人在移动过程中四周的障碍物,弥补激光雷达的盲区。通过设置在左后轮,右后轮和方向轮上的编码器,读取两个后轮的运转圈
一种自主导航的机器人及其自主导航方法.pdf
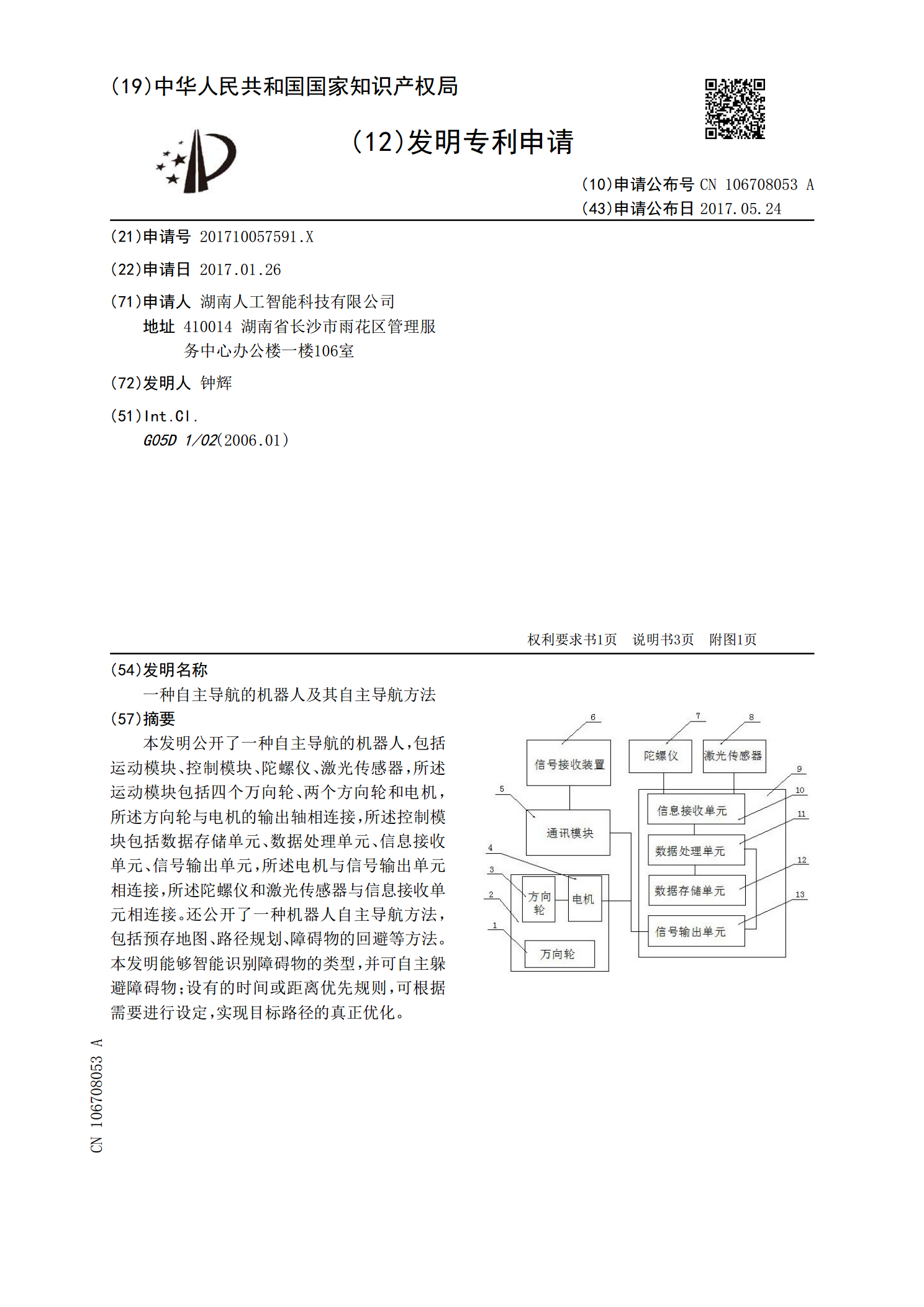
本发明公开了一种自主导航的机器人,包括运动模块、控制模块、陀螺仪、激光传感器,所述运动模块包括四个万向轮、两个方向轮和电机,所述方向轮与电机的输出轴相连接,所述控制模块包括数据存储单元、数据处理单元、信息接收单元、信号输出单元,所述电机与信号输出单元相连接,所述陀螺仪和激光传感器与信息接收单元相连接。还公开了一种机器人自主导航方法,包括预存地图、路径规划、障碍物的回避等方法。本发明能够智能识别障碍物的类型,并可自主躲避障碍物;设有的时间或距离优先规则,可根据需要进行设定,实现目标路径的真正优化。

一种移动机器人自主避障与导航方法.docx
一种移动机器人自主避障与导航方法引言:随着科技的不断进步,人类对于机器人的需求也越来越大,并应用于各种领域。移动机器人自主避障与导航技术是其中的重点研究方向之一。对于移动机器人来说,有效地躲避障碍物以及找到最优路径是实现自主导航的重要基础。因此,本文将介绍一种基于机器人控制算法、传感器技术和路径规划算法的自主避障与导航方法,以帮助移动机器人在其工作环境中更自主地完成任务。一、机器人控制算法机器人的控制算法是指移动机器人采用的运动控制策略。一般而言,机器人控制算法可分为开环控制算法与闭环控制算法。在开环控制

导航半自主移动机器人.pdf
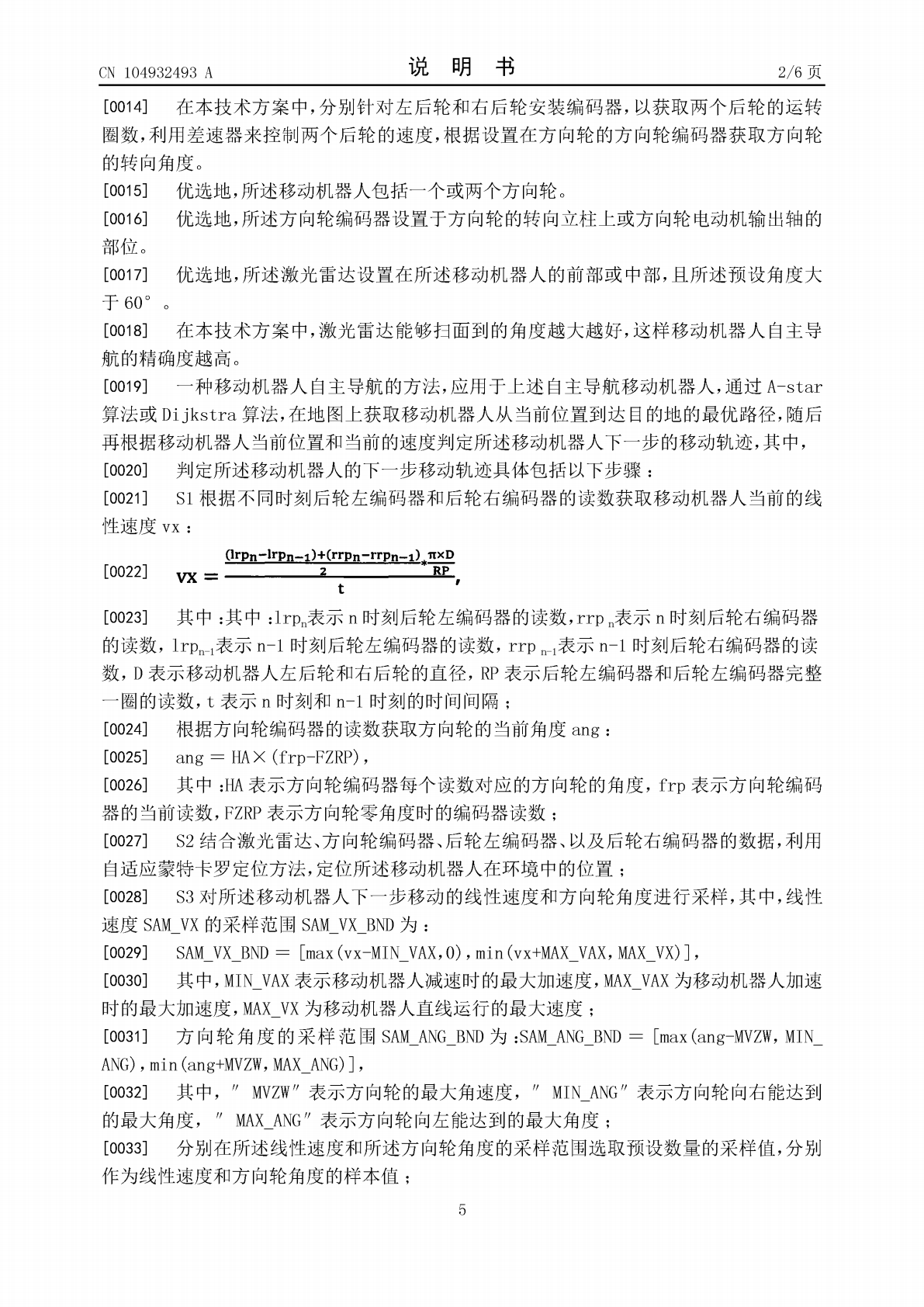
描述了用于导航半自主移动机器人的技术。半自主移动机器人在环境中移动以完成任务。导航服务器与机器人进行通信并为机器人提供信息。机器人包括环境的导航地图、交互信息和安全级别。为了完成该任务,机器人向导航服务器发送路线预留请求,该路线预留请求包括该任务的优先级、时间槽和路线。如果任务优先级高于来自其他机器人的冲突路线预留请求的任务优先级,则导航服务器准许路线预留。当机器人在环境中移动时,机器人检测到对象并尝试将检测到的对象分类为属于对象类别。机器人取回对象的交互简档,并根据取回的交互简档与对象进行交互。
一种牵引导航自主移动机器人.pdf
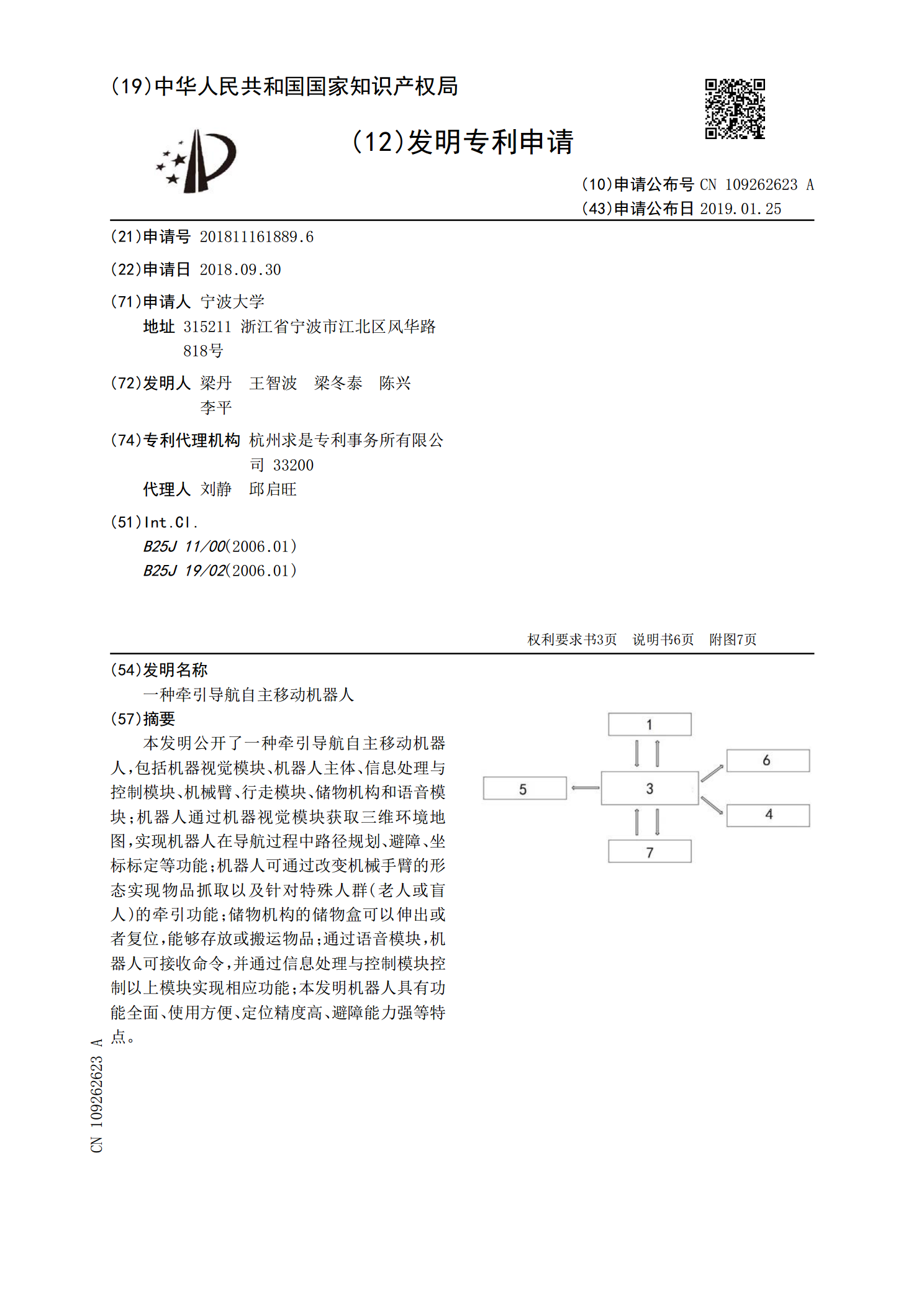
本发明公开了一种牵引导航自主移动机器人,包括机器视觉模块、机器人主体、信息处理与控制模块、机械臂、行走模块、储物机构和语音模块;机器人通过机器视觉模块获取三维环境地图,实现机器人在导航过程中路径规划、避障、坐标标定等功能;机器人可通过改变机械手臂的形态实现物品抓取以及针对特殊人群(老人或盲人)的牵引功能;储物机构的储物盒可以伸出或者复位,能够存放或搬运物品;通过语音模块,机器人可接收命令,并通过信息处理与控制模块控制以上模块实现相应功能;本发明机器人具有功能全面、使用方便、定位精度高、避障能力强等特点。