
一种涡轮蜗杆驱动的平分运动摇臂机构.pdf

一条****淑淑


1/6

2/6

3/6

4/6

5/6

6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种涡轮蜗杆驱动的平分运动摇臂机构.pdf
一种涡轮蜗杆驱动的平分运动摇臂机构,它是由蜗杆、左涡轮、右蜗轮、左摇臂、右摇臂、左轴和右轴组成;蜗杆分别与左涡轮和右蜗轮啮合;左涡轮和右涡轮分别与左摇臂和右摇臂刚性连接在一起;左轴和右轴的中心线分别与左涡轮和右涡轮的中心线重合;左轴和右轴分别与左摇臂和右摇臂固接;在蜗杆的驱动下,左蜗轮和右蜗轮相对各自的中心线,即左轴和右轴转动,也随之带动了与之固连的左摇臂和右摇臂分别有相对左轴和右轴转动的运动,从而实现两个摇臂运动的平分。本发明结构紧凑,性能优越,能实现平分运动和机构的自锁功能。在机械及汽车工程技术领域里

一种蜗杆摇臂机构.pdf
本发明涉及一种蜗杆摇臂机构,包括支撑臂(1)、摇臂(15)和涡轮座(7),所述支撑臂(1)上部安装有第一回转机构,所述的摇臂的下部安装有第二回转机构,所述的第一回转机构以及第二回转机构均安装在所述的涡轮座(7)上。本发明的优点是:1、安装方便,极大的降低工人劳动强度;2、节约成本,加快作业速度;3、可实现多角度旋转,大幅提高工作效率。
一种分体涡轮蜗杆机构.pdf
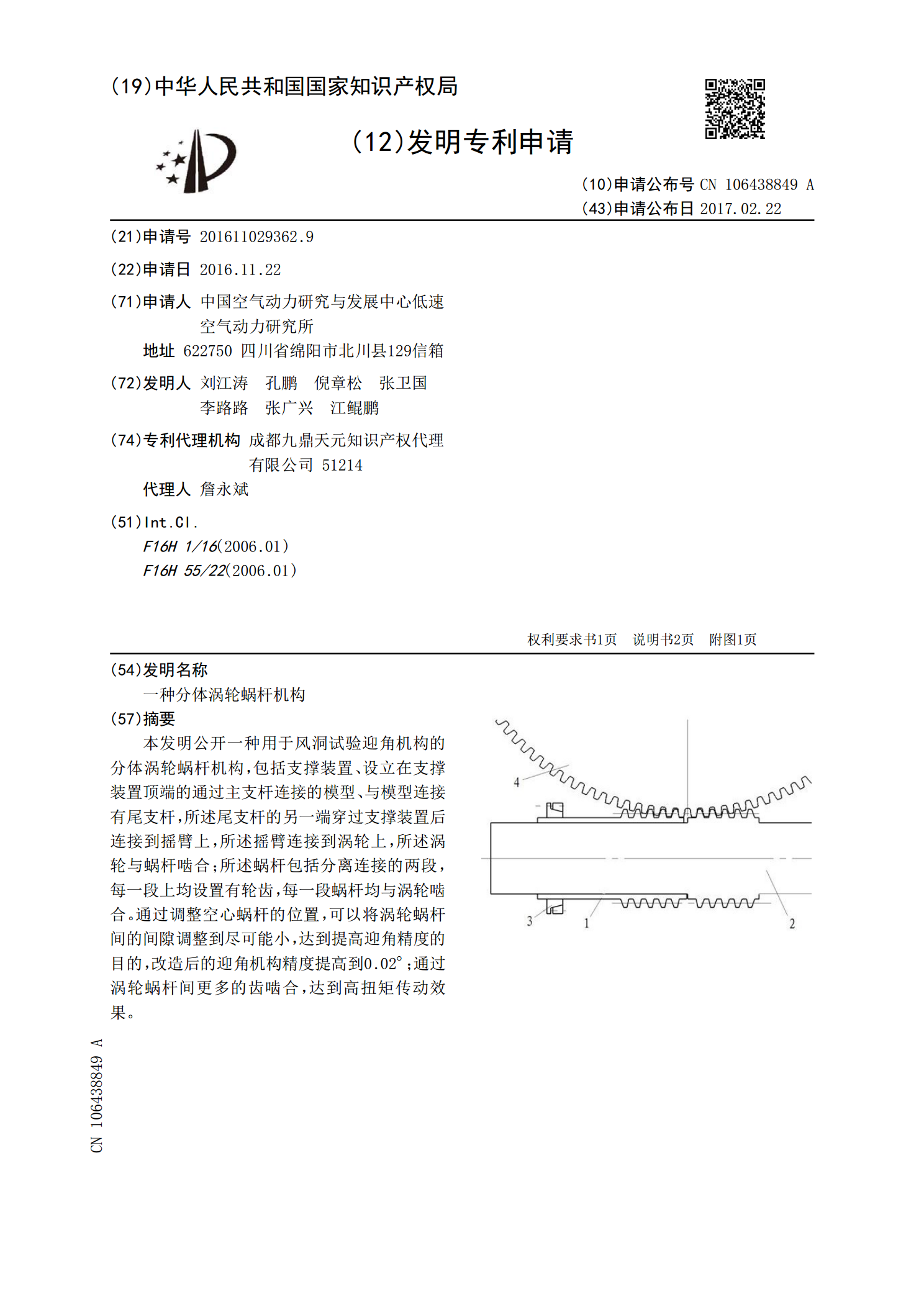
本发明公开一种用于风洞试验迎角机构的分体涡轮蜗杆机构,包括支撑装置、设立在支撑装置顶端的通过主支杆连接的模型、与模型连接有尾支杆,所述尾支杆的另一端穿过支撑装置后连接到摇臂上,所述摇臂连接到涡轮上,所述涡轮与蜗杆啮合;所述蜗杆包括分离连接的两段,每一段上均设置有轮齿,每一段蜗杆均与涡轮啮合。通过调整空心蜗杆的位置,可以将涡轮蜗杆间的间隙调整到尽可能小,达到提高迎角精度的目的,改造后的迎角机构精度提高到0.02°;通过涡轮蜗杆间更多的齿啮合,达到高扭矩传动效果。

一种涡轮蜗杆驱动式可变连杆长度变压缩比机构.pdf
本发明公开一种涡轮蜗杆驱动式可变连杆长度变压缩比机构,包括连杆小头、偏心连杆衬套、蜗杆、从动齿轮、主动齿轮、驱动电机、连杆体、轴承端盖、轴承等,其特征在于:将偏心连杆衬套安装在连杆小头孔内,偏心连杆衬套的偏心孔用来安装活塞销,再将蜗杆安装在连杆小头内部加工圆孔中,蜗杆与连杆偏心衬套中间位置弧形齿轮啮合,组成蜗轮蜗杆传动系统,驱动电机内置在连杆体内通过电控系统控制,驱动电机通过齿轮传动系统驱动涡轮蜗杆系统,致使偏心连杆衬套发生转动,进而改变活塞销孔轴线到曲轴颈直线距离,连杆长度发生变化从而发动机压缩比得到改
一种涡轮蜗杆减速机构.pdf
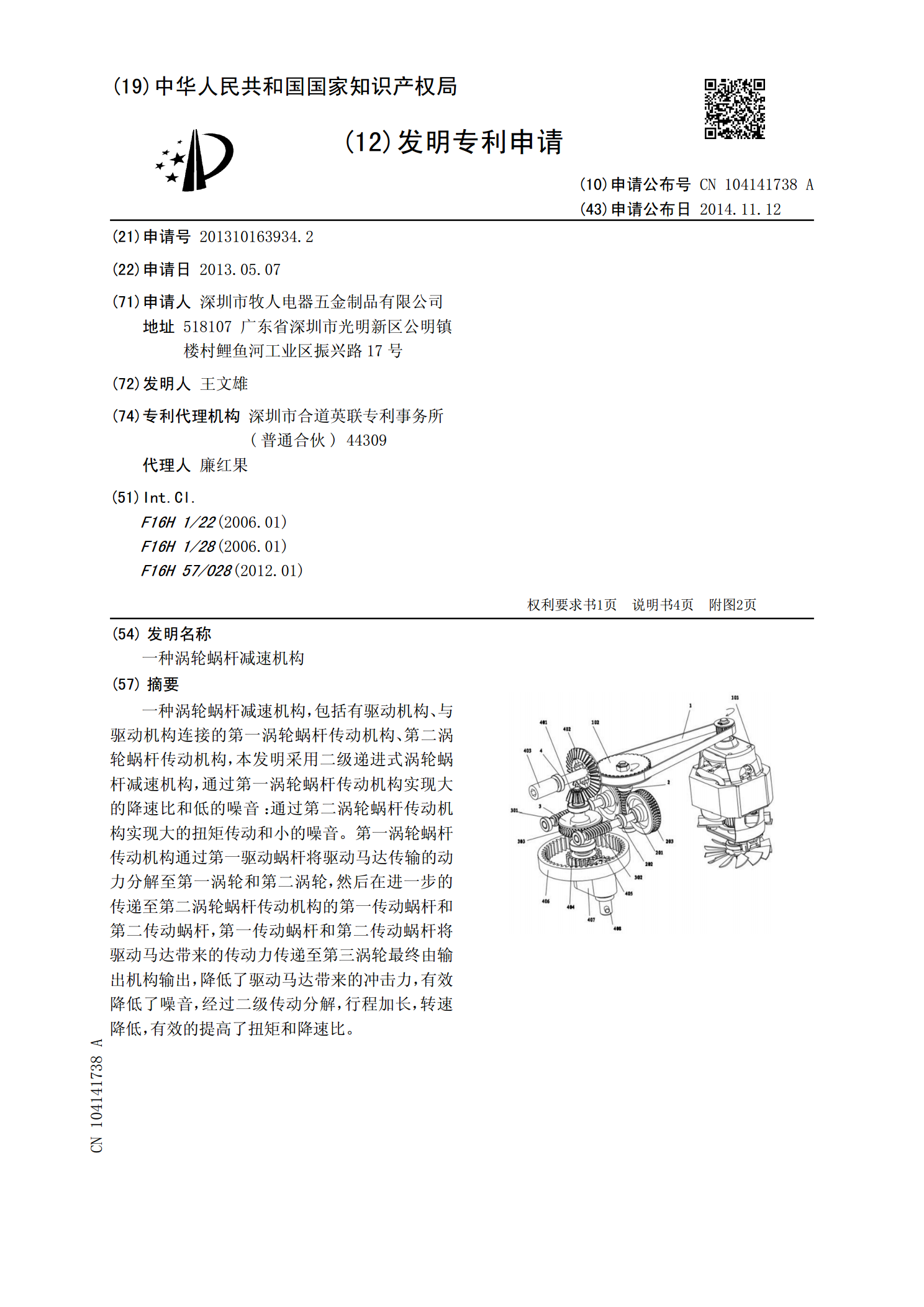
一种涡轮蜗杆减速机构,包括有驱动机构、与驱动机构连接的第一涡轮蜗杆传动机构、第二涡轮蜗杆传动机构,本发明采用二级递进式涡轮蜗杆减速机构,通过第一涡轮蜗杆传动机构实现大的降速比和低的噪音:通过第二涡轮蜗杆传动机构实现大的扭矩传动和小的噪音。第一涡轮蜗杆传动机构通过第一驱动蜗杆将驱动马达传输的动力分解至第一涡轮和第二涡轮,然后在进一步的传递至第二涡轮蜗杆传动机构的第一传动蜗杆和第二传动蜗杆,第一传动蜗杆和第二传动蜗杆将驱动马达带来的传动力传递至第三涡轮最终由输出机构输出,降低了驱动马达带来的冲击力,有效降低了