
多轴车辆全轮转向控制方法及控制系统.pdf

雨巷****珺琦


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

多轴车辆全轮转向控制方法及控制系统.pdf
本发明提出一种多轴车辆全轮转向控制方法,适用于对其前轴采用机械拉杆式转向,对其后轴采用电控转向的多轴车辆,多轴车辆包括ECU、若干角度传感器以及若干电控转向执行机构,所述方法包括以下步骤:通过角度传感器感测一根前轴的一侧轮的转角,并发送给ECU;通过ECU计算所有前轴的两侧轮转角的算术平均值的平均值;通过ECU驱动各电控转向执行机构推动各后轴转向,并使各后轴两侧轮转角算术平均值等于所有前轴的两侧轮转角算术平均值的平均值。本发明还提出一种多轴车辆全轮转向控制系统。采用这种多轴车辆全轮转向控制方法及控制系统,

布置多轴转向车辆的助力油缸的方法和多轴转向车辆.pdf
本发明公开了一种多轴转向车辆和布置多轴转向车辆的助力油缸的方法,所述多轴转向车辆包括多个转向桥,每个转向桥安装有两个车轮和两个分别用于助力所述两个车轮转向的助力油缸,所述方法包括:将所述助力油缸设置为使得每个所述转向桥的两个相应的助力油缸对该转向桥作用的转向动力矩与所述转向桥的转向阻力矩匹配。通过本发明的方法将各助力油缸布置在适当的位置使得每个转向桥的转向动力矩与转向阻力矩匹配,从而减少了转向杆系传递的力矩,并避免了转向杆系因传递力矩导致的受力过大,提高了转向系统的安全性和可靠性。
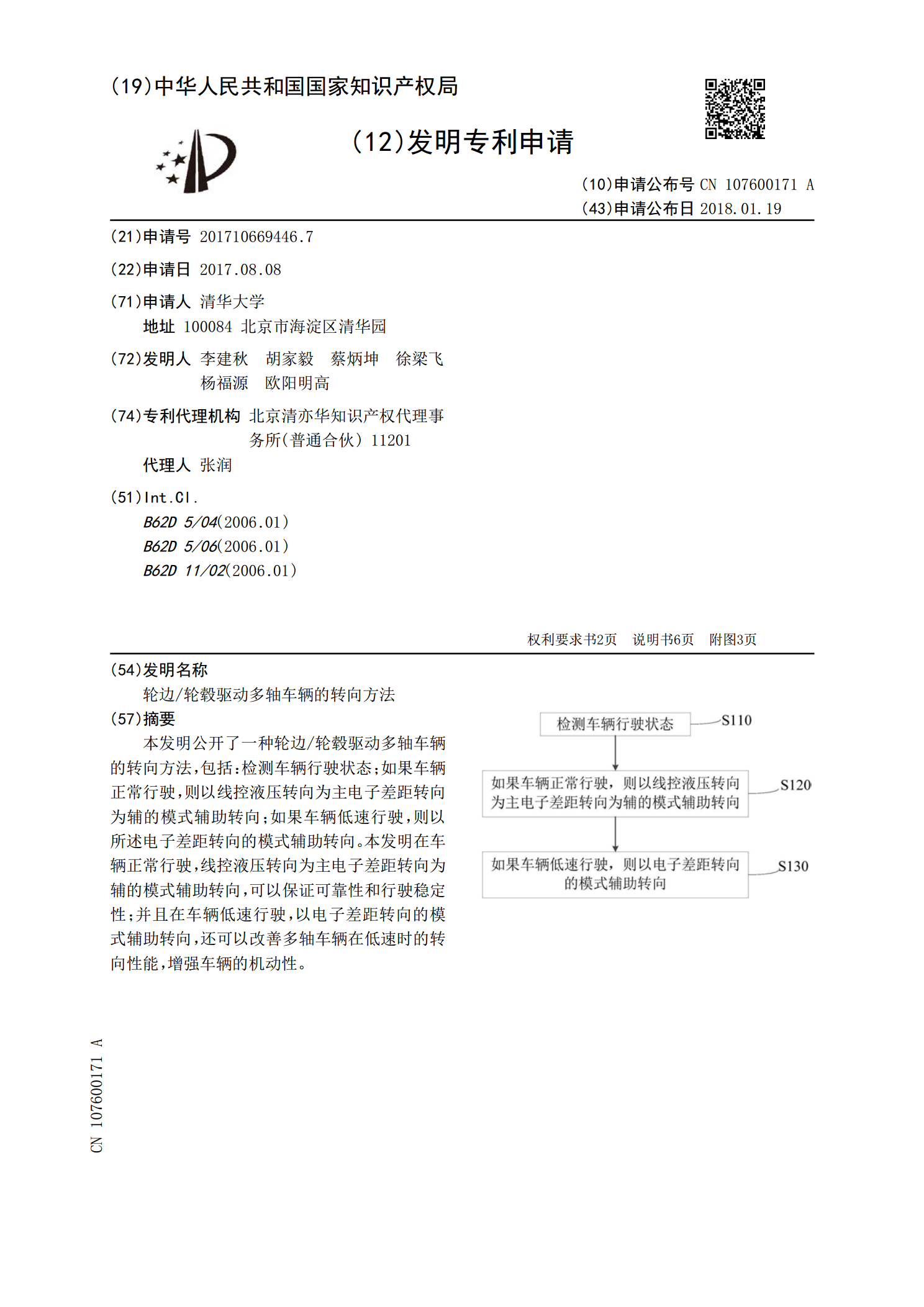
轮边/轮毂驱动多轴车辆的转向方法.pdf
本发明公开了一种轮边/轮毂驱动多轴车辆的转向方法,包括:检测车辆行驶状态;如果车辆正常行驶,则以线控液压转向为主电子差距转向为辅的模式辅助转向;如果车辆低速行驶,则以所述电子差距转向的模式辅助转向。本发明在车辆正常行驶,线控液压转向为主电子差距转向为辅的模式辅助转向,可以保证可靠性和行驶稳定性;并且在车辆低速行驶,以电子差距转向的模式辅助转向,还可以改善多轴车辆在低速时的转向性能,增强车辆的机动性。
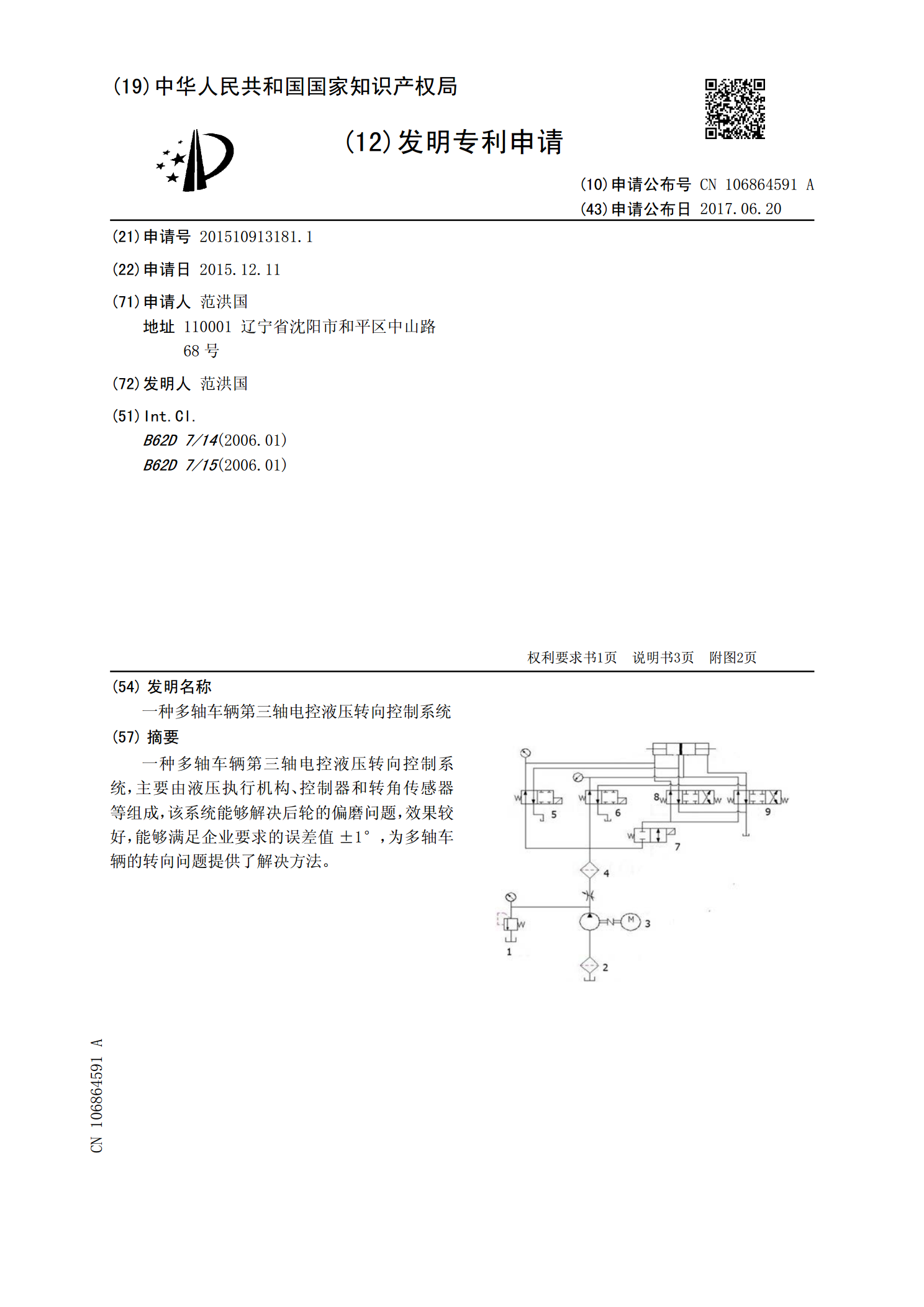
一种多轴车辆第三轴电控液压转向控制系统.pdf
一种多轴车辆第三轴电控液压转向控制系统,主要由液压执行机构、控制器和转角传感器等组成,该系统能够解决后轮的偏磨问题,效果较好,能够满足企业要求的误差值±1°,为多轴车辆的转向问题提供了解决方法。
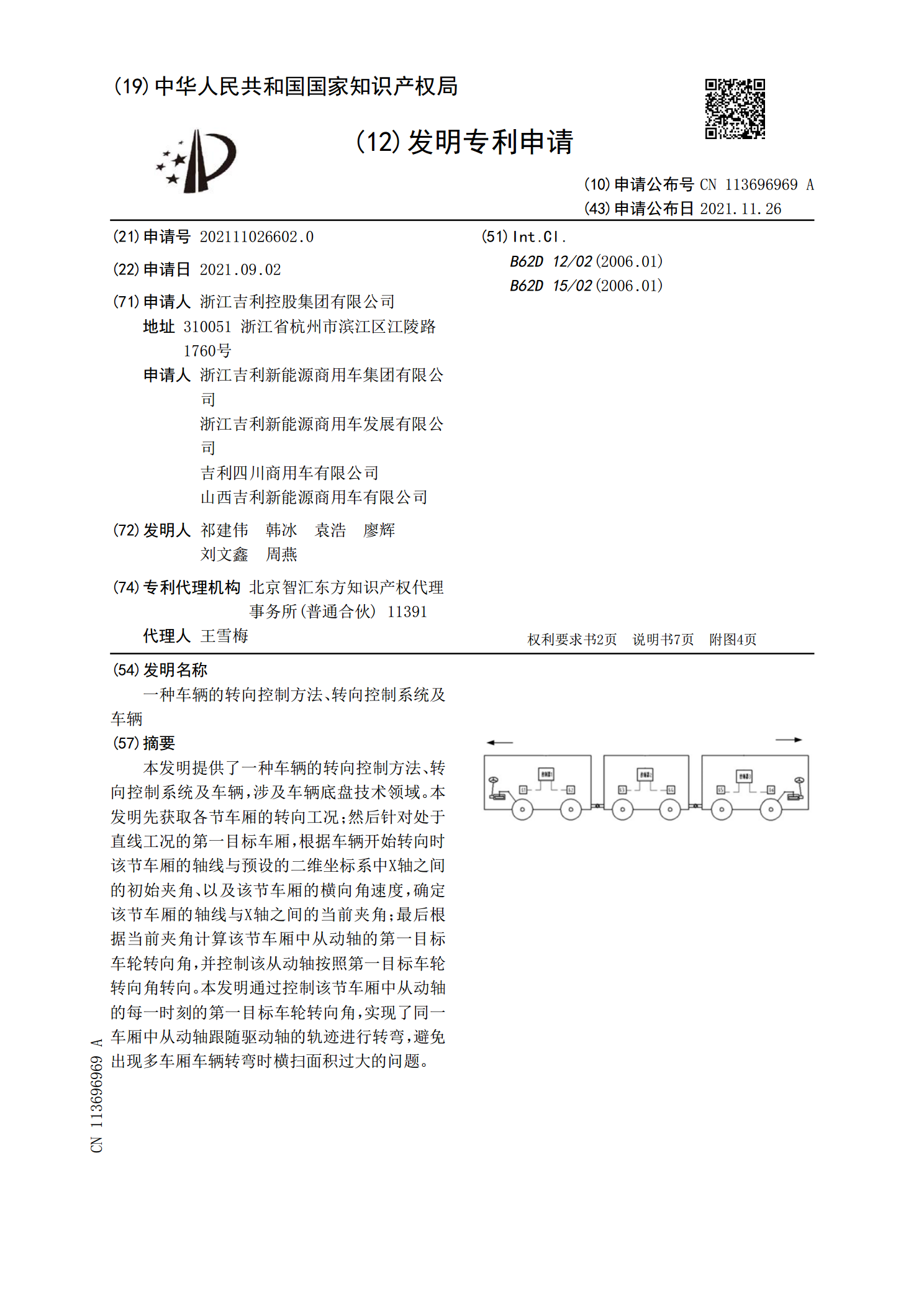
一种车辆的转向控制方法、转向控制系统及车辆.pdf
本发明提供了一种车辆的转向控制方法、转向控制系统及车辆,涉及车辆底盘技术领域。本发明先获取各节车厢的转向工况;然后针对处于直线工况的第一目标车厢,根据车辆开始转向时该节车厢的轴线与预设的二维坐标系中X轴之间的初始夹角、以及该节车厢的横向角速度,确定该节车厢的轴线与X轴之间的当前夹角;最后根据当前夹角计算该节车厢中从动轴的第一目标车轮转向角,并控制该从动轴按照第一目标车轮转向角转向。本发明通过控制该节车厢中从动轴的每一时刻的第一目标车轮转向角,实现了同一车厢中从动轴跟随驱动轴的轨迹进行转弯,避免出现多车厢车