
蜗杆减速器、机器人关节及机器臂.pdf

猫巷****傲柏

1/10
2/10
3/10

4/10
5/10
6/10

7/10

8/10
9/10
10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
蜗杆减速器、机器人关节及机器臂.pdf
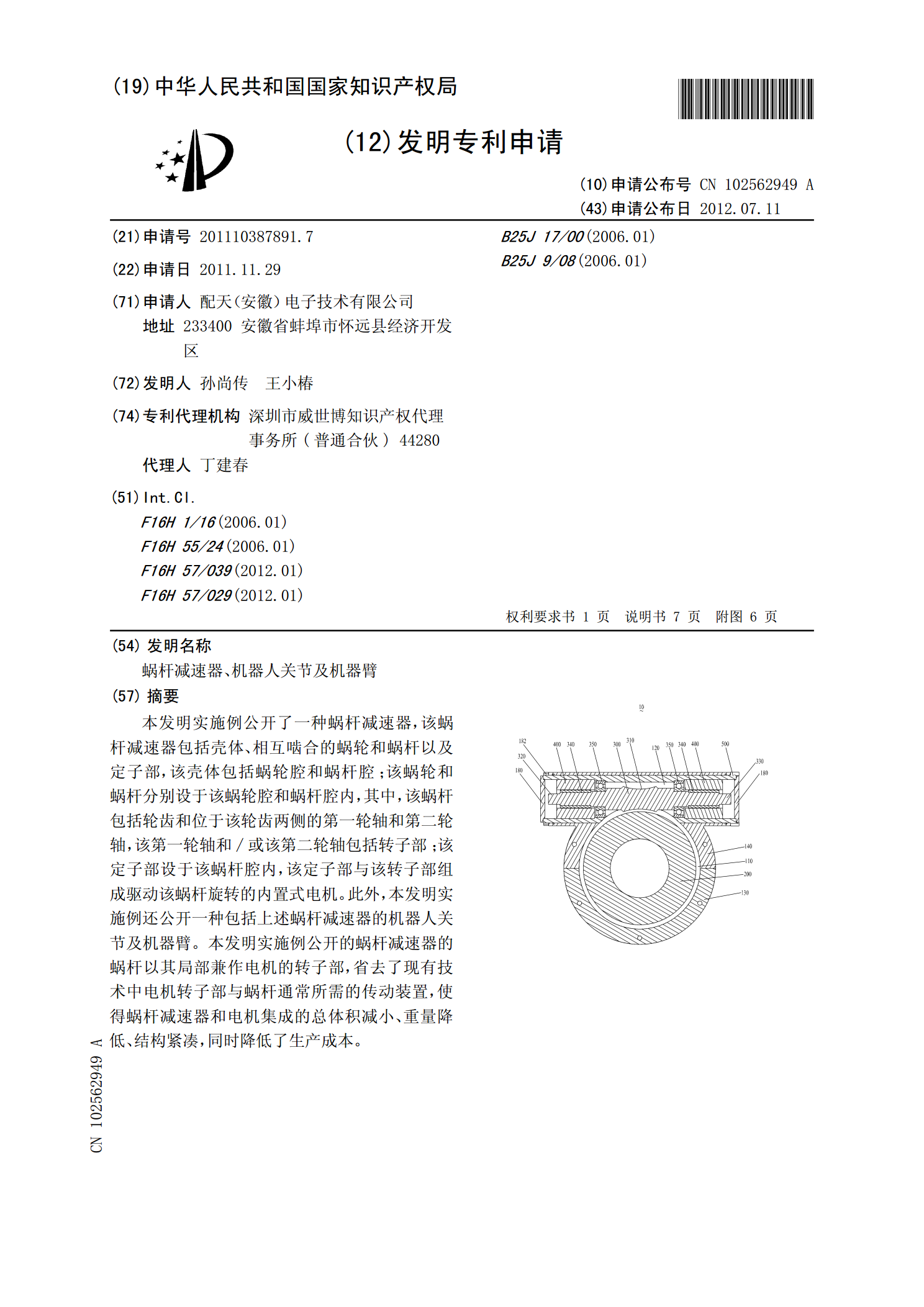
本发明实施例公开了一种蜗杆减速器,该蜗杆减速器包括壳体、相互啮合的蜗轮和蜗杆以及定子部,该壳体包括蜗轮腔和蜗杆腔;该蜗轮和蜗杆分别设于该蜗轮腔和蜗杆腔内,其中,该蜗杆包括轮齿和位于该轮齿两侧的第一轮轴和第二轮轴,该第一轮轴和/或该第二轮轴包括转子部;该定子部设于该蜗杆腔内,该定子部与该转子部组成驱动该蜗杆旋转的内置式电机。此外,本发明实施例还公开一种包括上述蜗杆减速器的机器人关节及机器臂。本发明实施例公开的蜗杆减速器的蜗杆以其局部兼作电机的转子部,省去了现有技术中电机转子部与蜗杆通常所需的传动装置,使得蜗

蜗杆减速器、机器人关节及机器人.pdf
本发明实施例公开了一种蜗杆减速器,该蜗杆减速器包括壳体结构以及相互啮合的蜗杆和蜗轮。其中,该壳体结构包括第一壳体、第二壳体以及扣环,该蜗轮设置于该第一壳体内,该蜗杆设置于该第二壳体内,在该第一壳体和该第二壳体的侧部分别形成有扣环槽,该扣环扣入该扣环槽使得该第一壳体和该第二壳相互连接。本实施例提供的蜗杆减速器通过扣环实现第一壳体、第二壳体的紧凑配合,同时扣环也充当了减速器的迷宫密封。

蜗杆减速器、机器人关节及机器人.pdf
本发明实施例公开了一种蜗杆减速器,其包括相互啮合的蜗杆和蜗轮以及支撑蜗轮的蜗轮轴承,蜗轮包括轮体和与轮体相连接的轮齿部,其中,轮体的内侧具有中空结构,蜗轮轴承设于轮体的外侧并邻近轮齿部设置。本发明实施例还公开了采用上述蜗杆减速器的机器人关节及机器人。本发明实施例提供的蜗杆减速器采用中空结构的轮体且将蜗轮轴承设于轮体的外侧,使得蜗轮重量大大降低,同时降低了蜗轮及整个蜗杆减速器的体积。

用于机器人或机械臂关节的行星传动减速器.pdf
本发明公开了一种用于机器人或机械臂关节的行星传动减速器,包括太阳轮、行星架、驱动件、至少一个行星轮,控制件、第一内齿圈及第二内齿圈;控制件控制驱动件可选择地驱动太阳轮或太阳轮和行星架一起转动;行星轮与太阳轮啮合、第一内齿圈及第二内齿圈均与行星轮啮合,且第一内齿圈和第二内齿圈的齿数不同。本发明利用太阳轮、行星架、行星轮、第一内齿圈及第二内齿圈形成一个行星齿轮减速结构,使得结构紧凑,减小了体积;且同时设置第一内齿圈和第二内齿圈,提高了减速传动比;使得在使用的过程中,第二内齿圈一直有输出,从而通过第二内齿圈或第

用于机器人的关节、机械臂和机器人.pdf
公开了一种用于机器人的关节、机械臂和机器人。用于机器人的关节具有包括伺服电机、减速器和关节控制器的关节模组,所述关节还包括:力传感器,其设置在关节的输出端并测量输出端的受力状态以产生相应的数据信息;故障诊断模块,其与力传感器无线通信连接以从力传感器实时接收数据信息,故障诊断模块基于数据信息和用于驱动伺服电机的实时电学信号确定关节的运行状态。机械臂包括至少一个用于机器人的关节。机器人包括至少一个用于机器人的关节。在所述关节、机械臂和机器人中,可以实现关节的自我故障监测和诊断。