
用于确定在挂车与牵引车之间的车组角的方法和装置.pdf

Th****84


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

用于确定在挂车与牵引车之间的车组角的方法和装置.pdf
一种用于确定在牵引车-挂车-车组的牵引车(1)与挂车(2)之间的车组角(α)的方法和装置,其中,探测挂车的至少一个轴的车轮的转速。探测在挂车(2)的刚性轴上支承的第一车轮(9)的第一转速;探测在挂车(2)的转向轴上支承的第二车轮(11)的第二转速;探测在挂车(2)的刚性轴或转向轴上支承的第三车轮(10、12)的第三转速;分析在挂车(2)的转向轴上的车轮转向角(β);并且借助于掌握的车轮转向角和这些探测的转速或者由这些探测的转速导出的参量应用至少一个计算公式。
牵引车与挂车之间的角度检测方法、装置和电子设备.pdf
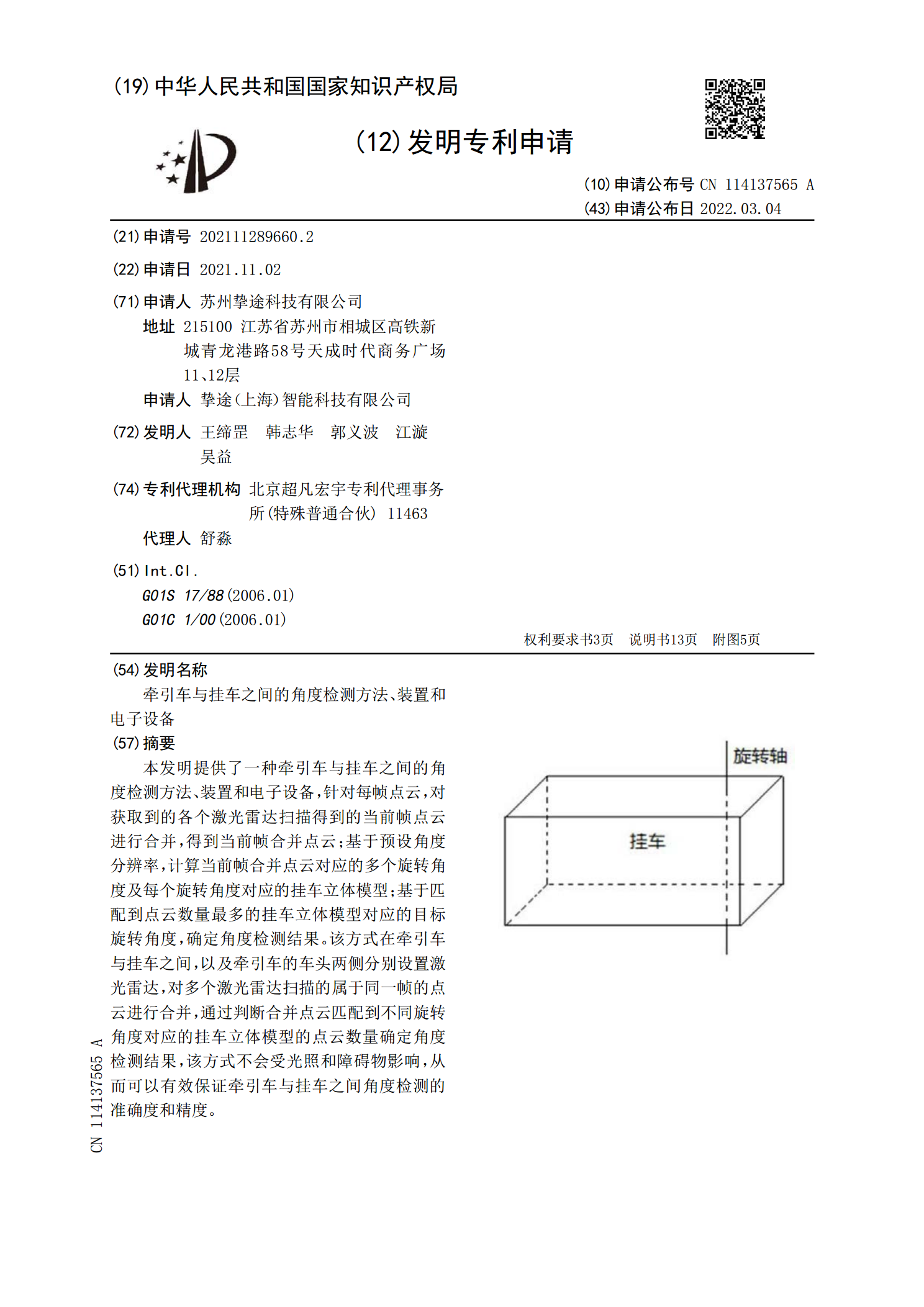
本发明提供了一种牵引车与挂车之间的角度检测方法、装置和电子设备,针对每帧点云,对获取到的各个激光雷达扫描得到的当前帧点云进行合并,得到当前帧合并点云;基于预设角度分辨率,计算当前帧合并点云对应的多个旋转角度及每个旋转角度对应的挂车立体模型;基于匹配到点云数量最多的挂车立体模型对应的目标旋转角度,确定角度检测结果。该方式在牵引车与挂车之间,以及牵引车的车头两侧分别设置激光雷达,对多个激光雷达扫描的属于同一帧的点云进行合并,通过判断合并点云匹配到不同旋转角度对应的挂车立体模型的点云数量确定角度检测结果,该方式
一种用于牵引车和挂车的匹配装置及方法.pdf
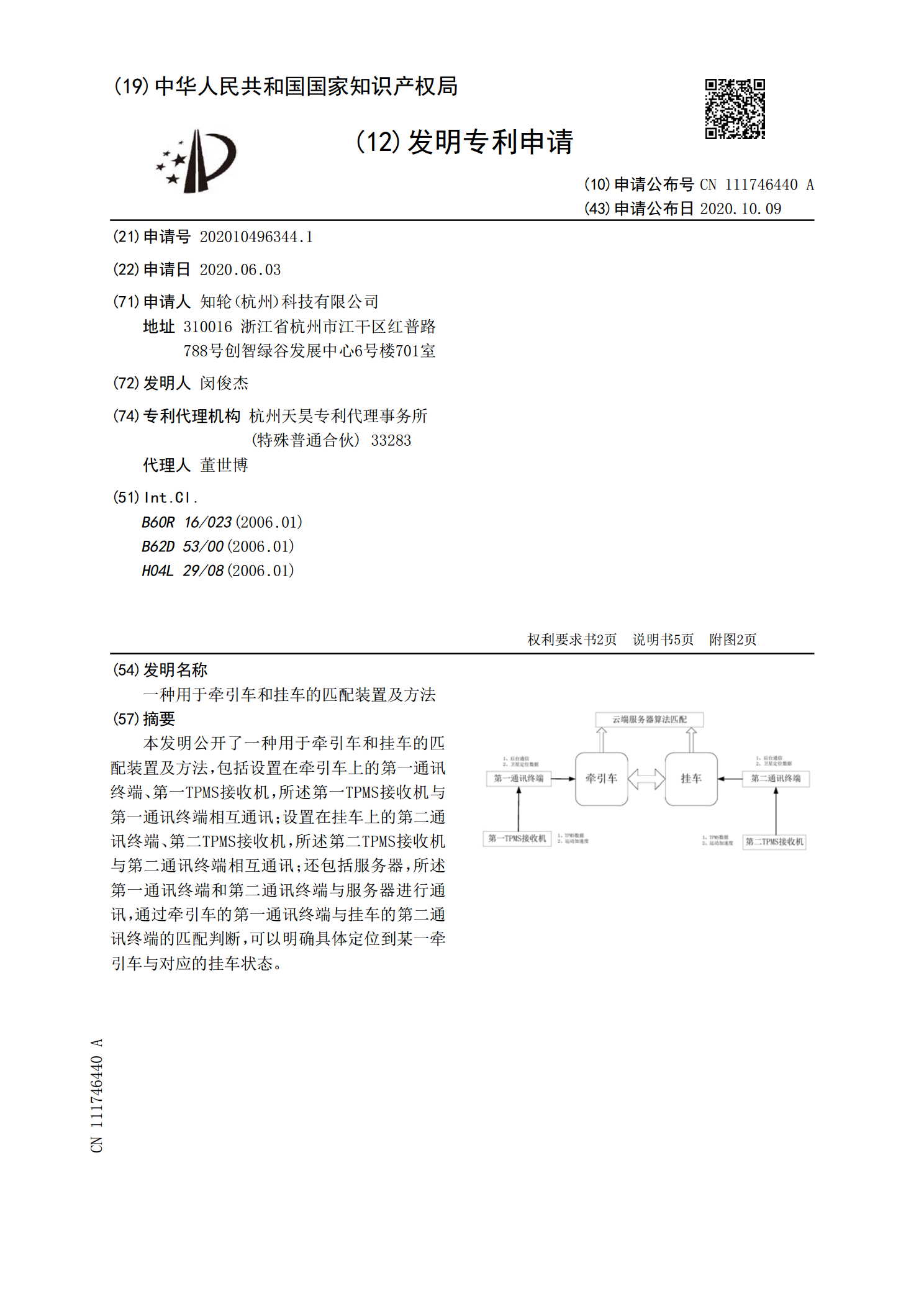
本发明公开了一种用于牵引车和挂车的匹配装置及方法,包括设置在牵引车上的第一通讯终端、第一TPMS接收机,所述第一TPMS接收机与第一通讯终端相互通讯;设置在挂车上的第二通讯终端、第二TPMS接收机,所述第二TPMS接收机与第二通讯终端相互通讯;还包括服务器,所述第一通讯终端和第二通讯终端与服务器进行通讯,通过牵引车的第一通讯终端与挂车的第二通讯终端的匹配判断,可以明确具体定位到某一牵引车与对应的挂车状态。

用于牵引车与挂车的连接装置.pdf
一种用于牵引车与挂车的连接装置,包含有与牵引车的车架联接并具有齿形的外卡板(1)、与挂车的车架铰接并具有齿形的内卡板(2)、设置为与内卡板(2)联接并带动内卡板(2)与外卡板(1)啮合联接的开合装置,通过内卡板(2)与外卡板(1)啮合联接,把牵引车与挂车连接在一起,不再使用牵引销,使内卡板(2)与外卡板(1)在纵向方向上可以移动,不再对挂车产生纵向的冲击力,因此提高了列车的运动性能。
用于牵引车与半挂车的连接装置.pdf
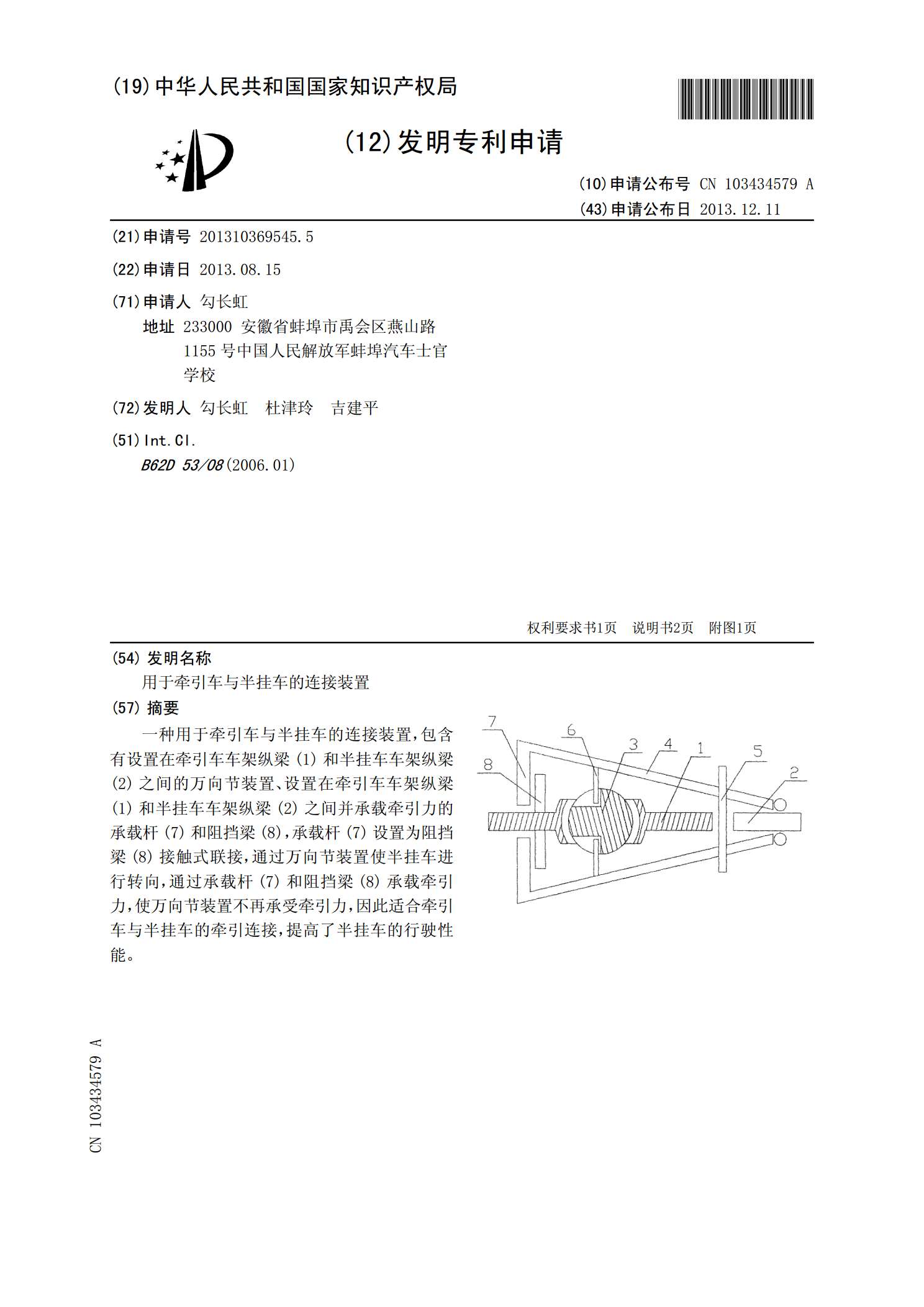
一种用于牵引车与半挂车的连接装置,包含有设置在牵引车车架纵梁(1)和半挂车车架纵梁(2)之间的万向节装置、设置在牵引车车架纵梁(1)和半挂车车架纵梁(2)之间并承载牵引力的承载杆(7)和阻挡梁(8),承载杆(7)设置为阻挡梁(8)接触式联接,通过万向节装置使半挂车进行转向,通过承载杆(7)和阻挡梁(8)承载牵引力,使万向节装置不再承受牵引力,因此适合牵引车与半挂车的牵引连接,提高了半挂车的行驶性能。