
飞机部件自动钻铆系统的基准检测装置及其检测方法.pdf

茂学****23

1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

飞机部件自动钻铆系统的基准检测装置及其检测方法.pdf
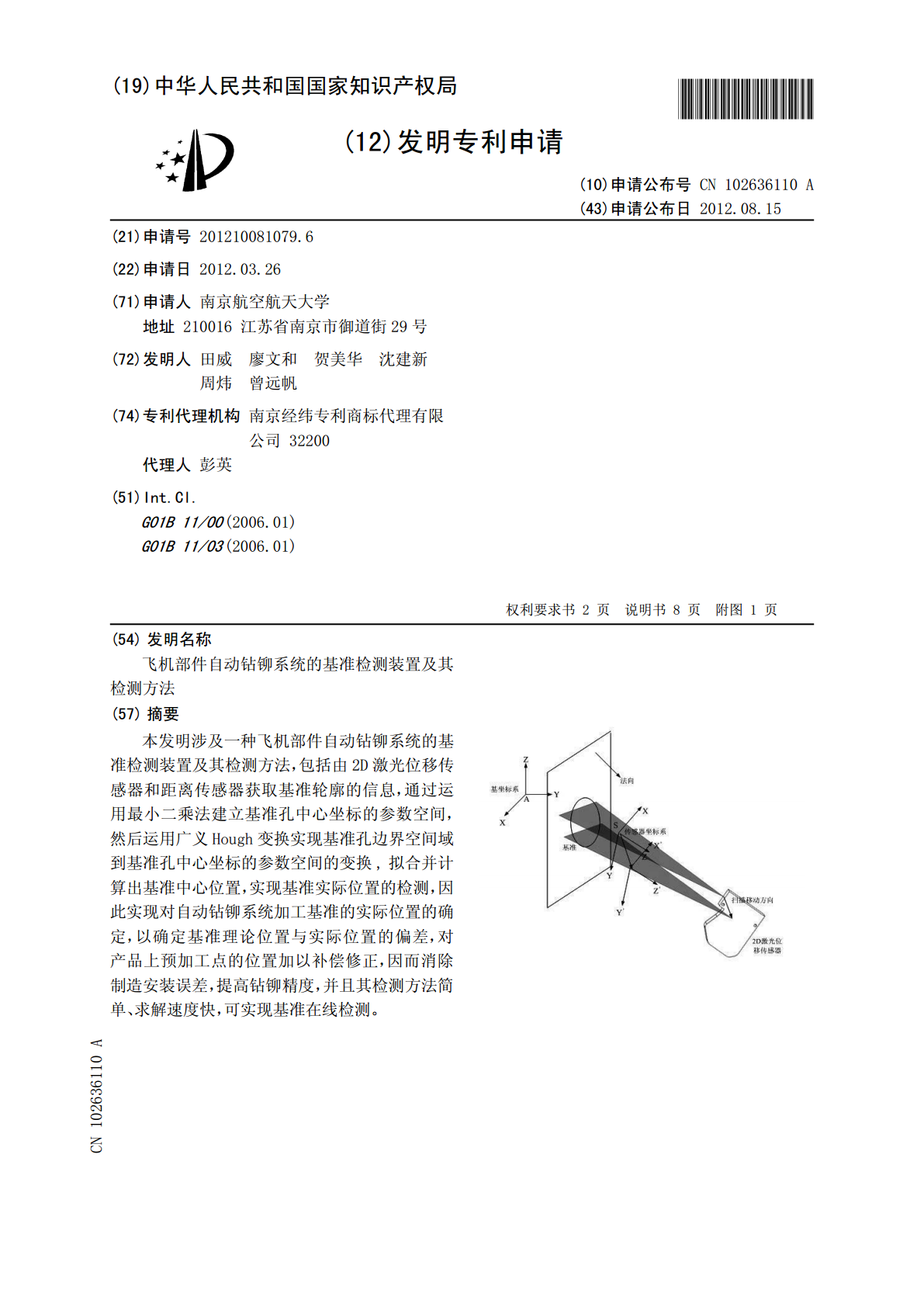
本发明涉及一种飞机部件自动钻铆系统的基准检测装置及其检测方法,包括由2D激光位移传感器和距离传感器获取基准轮廓的信息,通过运用最小二乘法建立基准孔中心坐标的参数空间,然后运用广义Hough变换实现基准孔边界空间域到基准孔中心坐标的参数空间的变换,拟合并计算出基准中心位置,实现基准实际位置的检测,因此实现对自动钻铆系统加工基准的实际位置的确定,以确定基准理论位置与实际位置的偏差,对产品上预加工点的位置加以补偿修正,因而消除制造安装误差,提高钻铆精度,并且其检测方法简单、求解速度快,可实现基准在线检测。
形位自适应自动钻铆系统及其使用方法.pdf
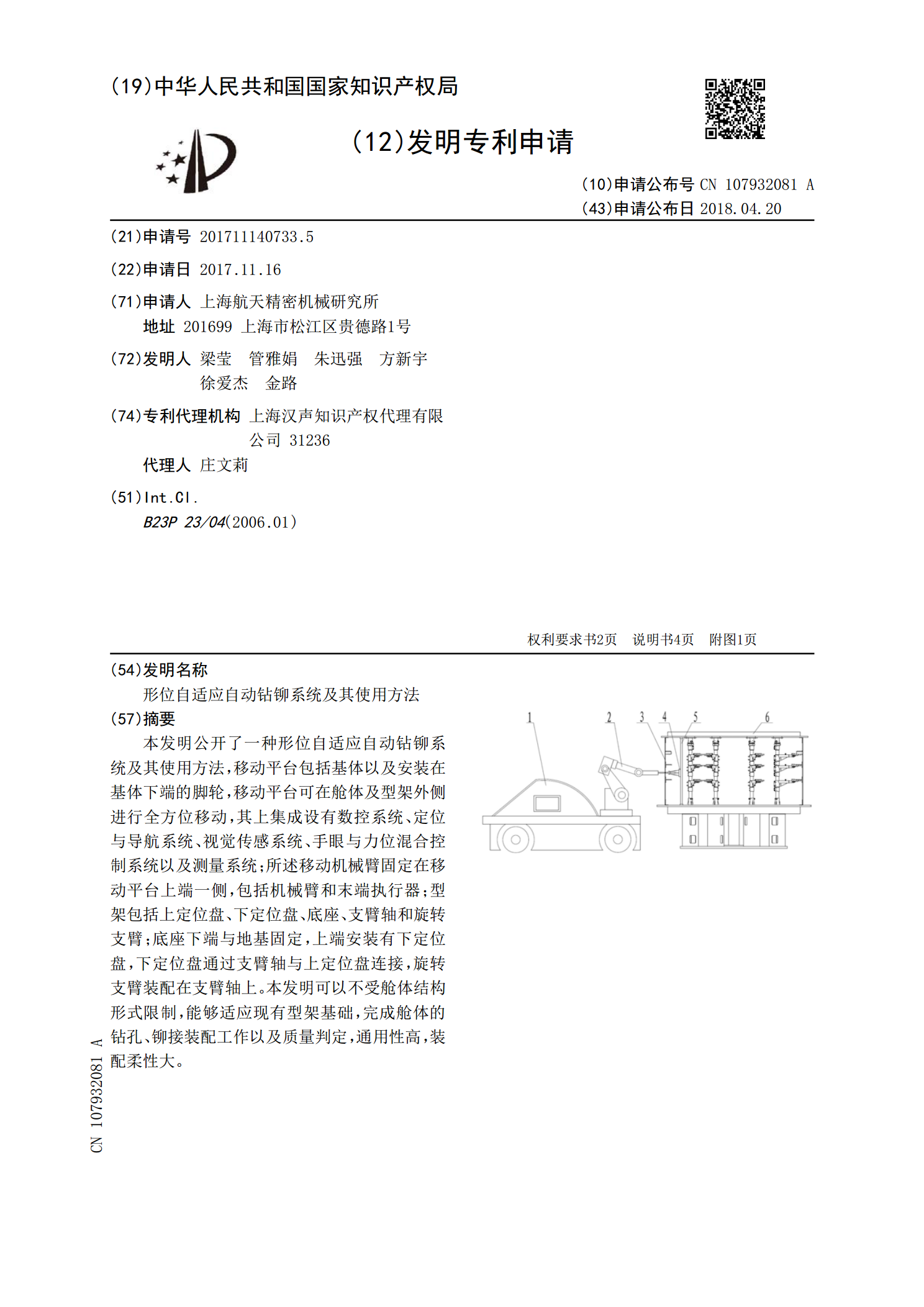
本发明公开了一种形位自适应自动钻铆系统及其使用方法,移动平台包括基体以及安装在基体下端的脚轮,移动平台可在舱体及型架外侧进行全方位移动,其上集成设有数控系统、定位与导航系统、视觉传感系统、手眼与力位混合控制系统以及测量系统;所述移动机械臂固定在移动平台上端一侧,包括机械臂和末端执行器;型架包括上定位盘、下定位盘、底座、支臂轴和旋转支臂;底座下端与地基固定,上端安装有下定位盘,下定位盘通过支臂轴与上定位盘连接,旋转支臂装配在支臂轴上。本发明可以不受舱体结构形式限制,能够适应现有型架基础,完成舱体的钻孔、铆接
自动音速检测装置及其检测方法.pdf
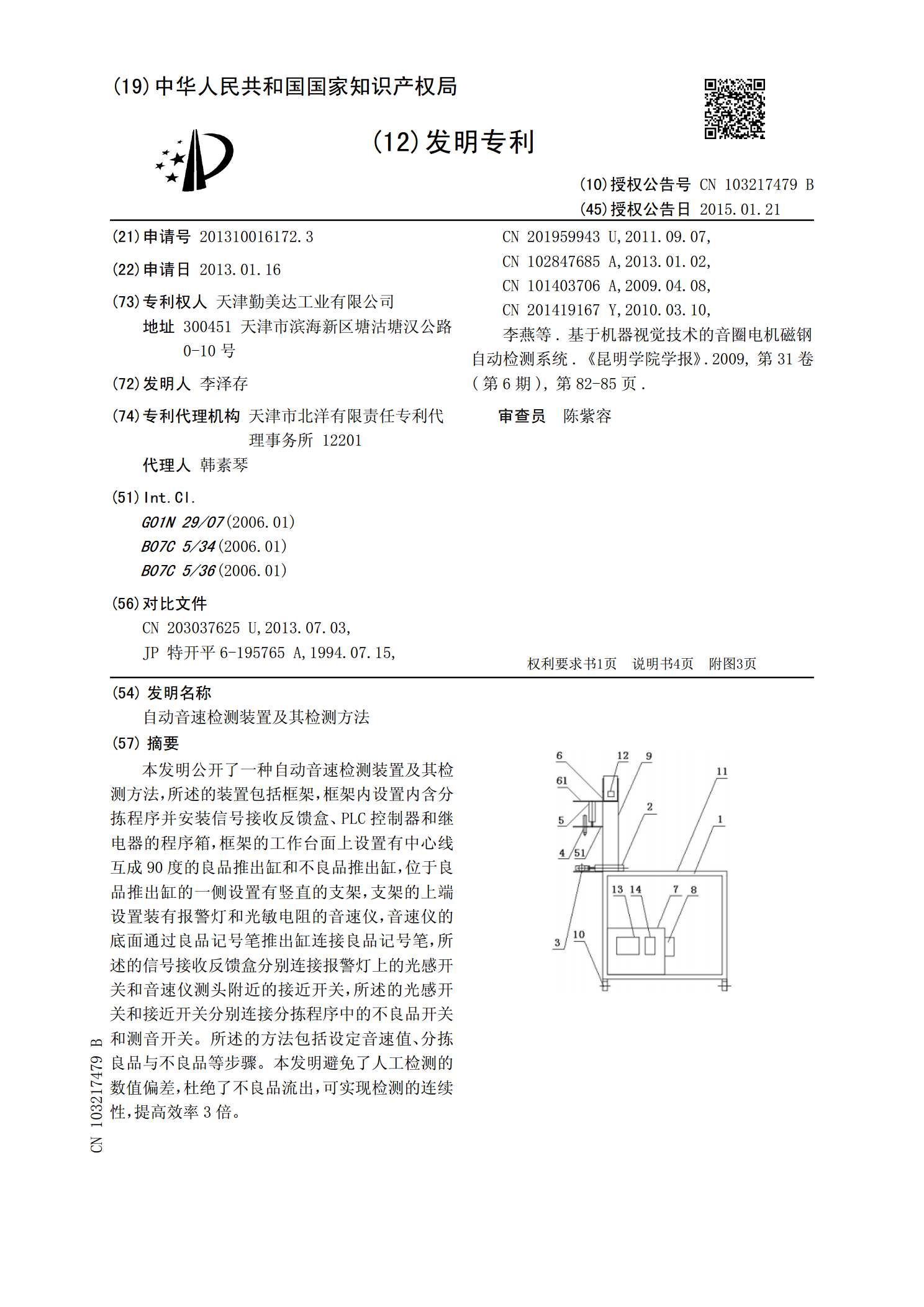
本发明公开了一种自动音速检测装置及其检测方法,所述的装置包括框架,框架内设置内含分拣程序并安装信号接收反馈盒、PLC控制器和继电器的程序箱,框架的工作台面上设置有中心线互成90度的良品推出缸和不良品推出缸,位于良品推出缸的一侧设置有竖直的支架,支架的上端设置装有报警灯和光敏电阻的音速仪,音速仪的底面通过良品记号笔推出缸连接良品记号笔,所述的信号接收反馈盒分别连接报警灯上的光感开关和音速仪测头附近的接近开关,所述的光感开关和接近开关分别连接分拣程序中的不良品开关和测音开关。所述的方法包括设定音速值、分拣良品
硒鼓部件自动称重检测装置.pdf
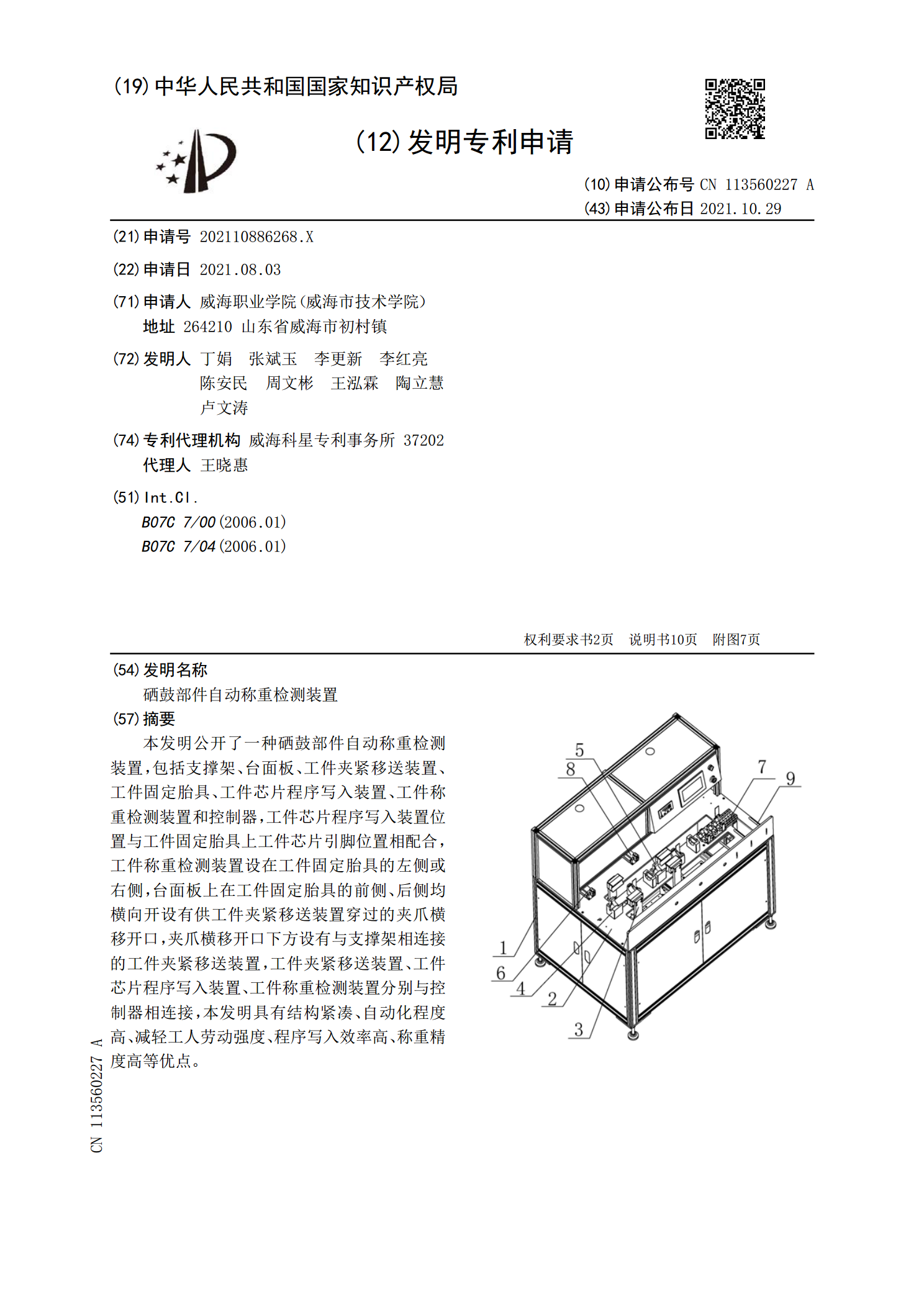
本发明公开了一种硒鼓部件自动称重检测装置,包括支撑架、台面板、工件夹紧移送装置、工件固定胎具、工件芯片程序写入装置、工件称重检测装置和控制器,工件芯片程序写入装置位置与工件固定胎具上工件芯片引脚位置相配合,工件称重检测装置设在工件固定胎具的左侧或右侧,台面板上在工件固定胎具的前侧、后侧均横向开设有供工件夹紧移送装置穿过的夹爪横移开口,夹爪横移开口下方设有与支撑架相连接的工件夹紧移送装置,工件夹紧移送装置、工件芯片程序写入装置、工件称重检测装置分别与控制器相连接,本发明具有结构紧凑、自动化程度高、减轻工人劳
一种钻柱动力检测系统及其检测方法.pdf
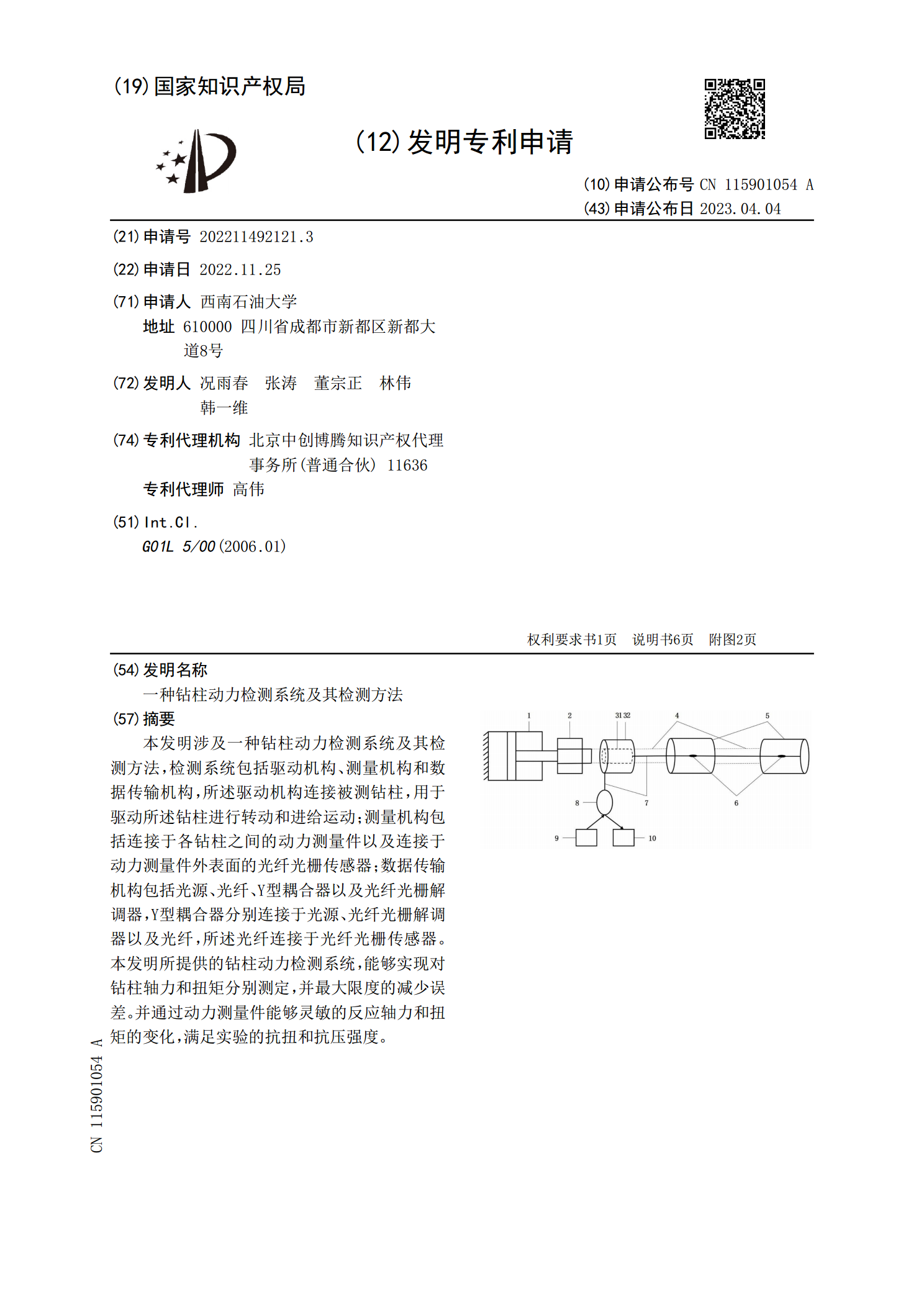
本发明涉及一种钻柱动力检测系统及其检测方法,检测系统包括驱动机构、测量机构和数据传输机构,所述驱动机构连接被测钻柱,用于驱动所述钻柱进行转动和进给运动;测量机构包括连接于各钻柱之间的动力测量件以及连接于动力测量件外表面的光纤光栅传感器;数据传输机构包括光源、光纤、Y型耦合器以及光纤光栅解调器,Y型耦合器分别连接于光源、光纤光栅解调器以及光纤,所述光纤连接于光纤光栅传感器。本发明所提供的钻柱动力检测系统,能够实现对钻柱轴力和扭矩分别测定,并最大限度的减少误差。并通过动力测量件能够灵敏的反应轴力和扭矩的变化,