
表面轮廓扫描式工件预截取部分称重装置.pdf

一吃****永贺


1/7
2/7
3/7
4/7

5/7

6/7

7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

表面轮廓扫描式工件预截取部分称重装置.pdf
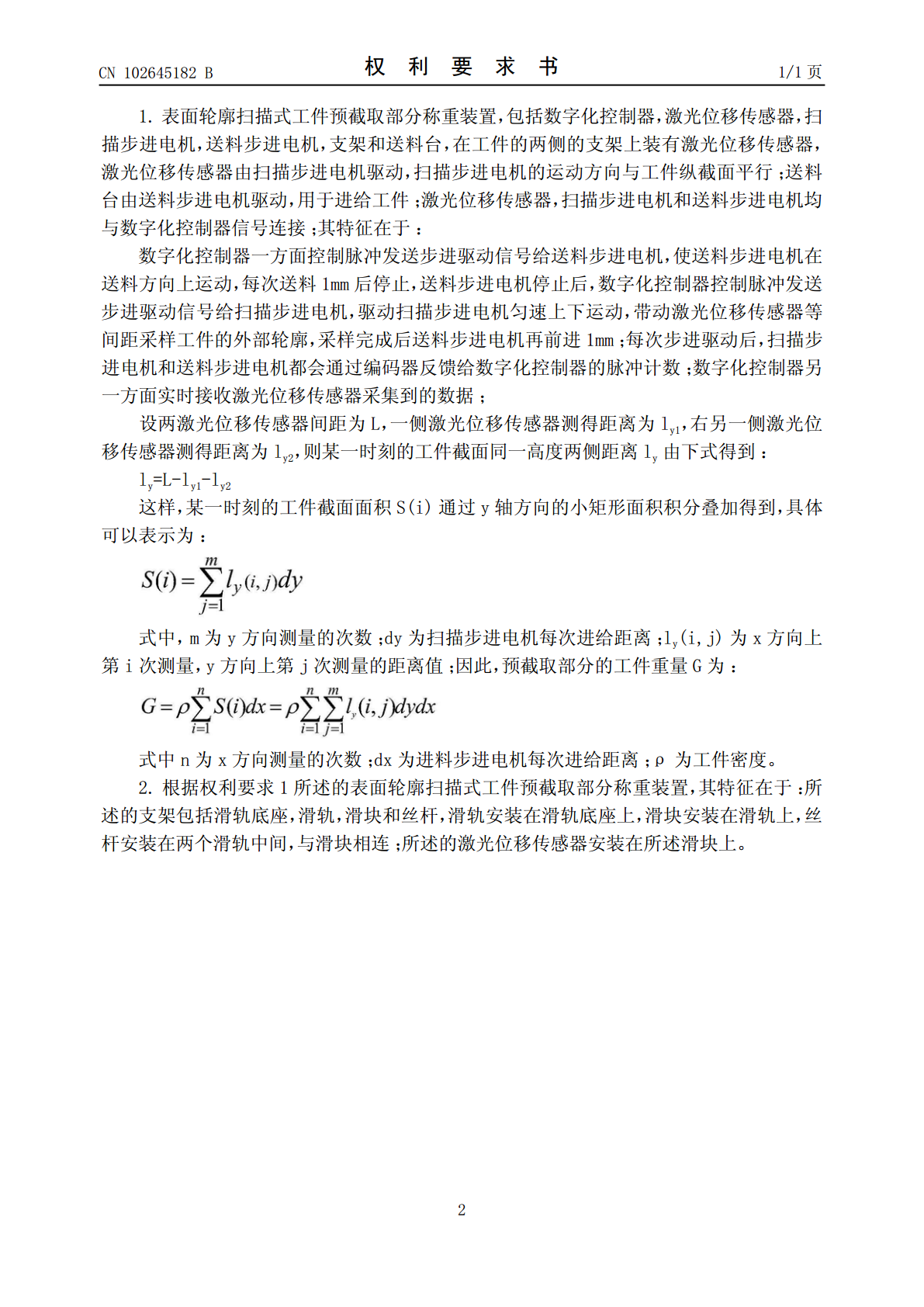
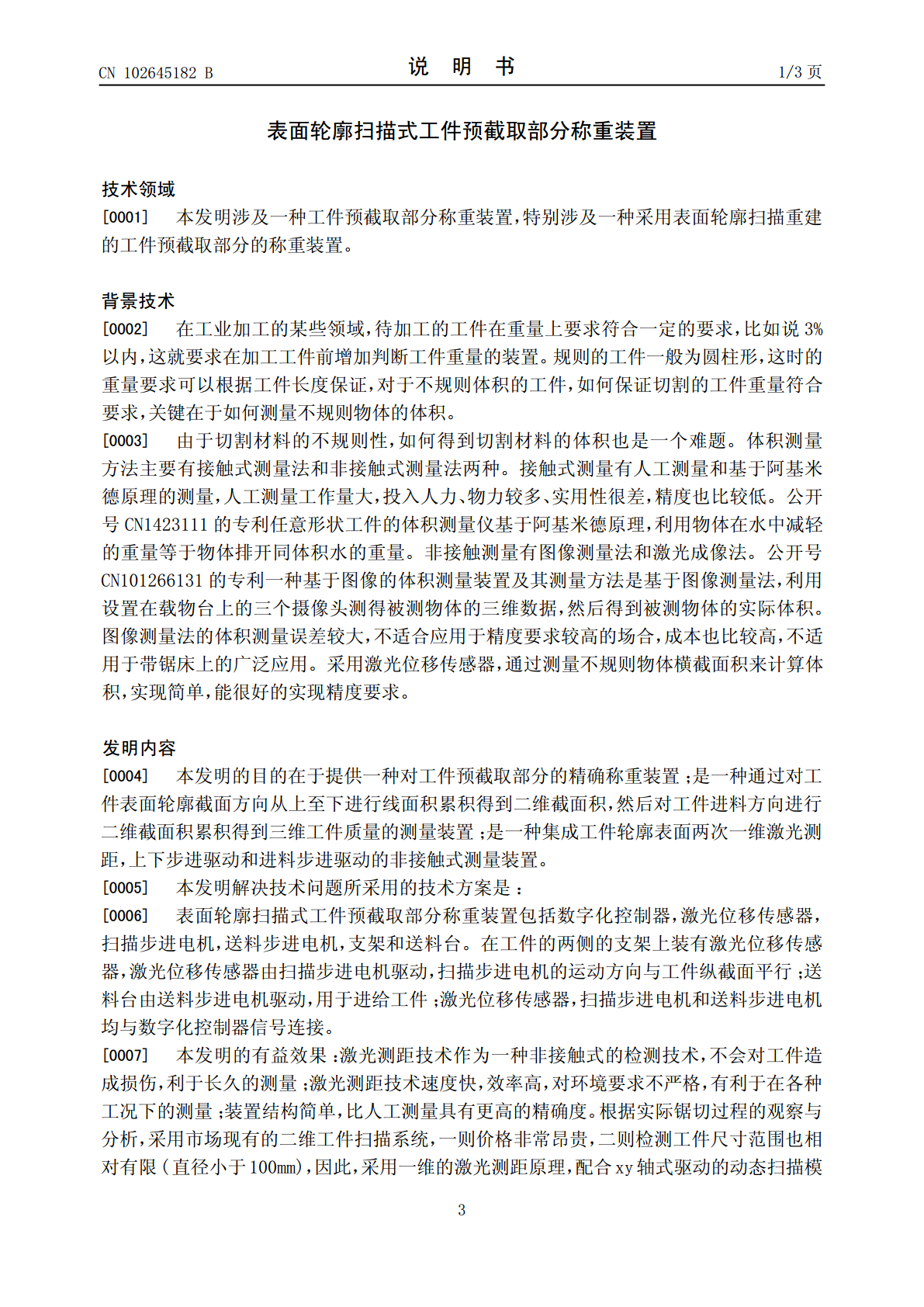
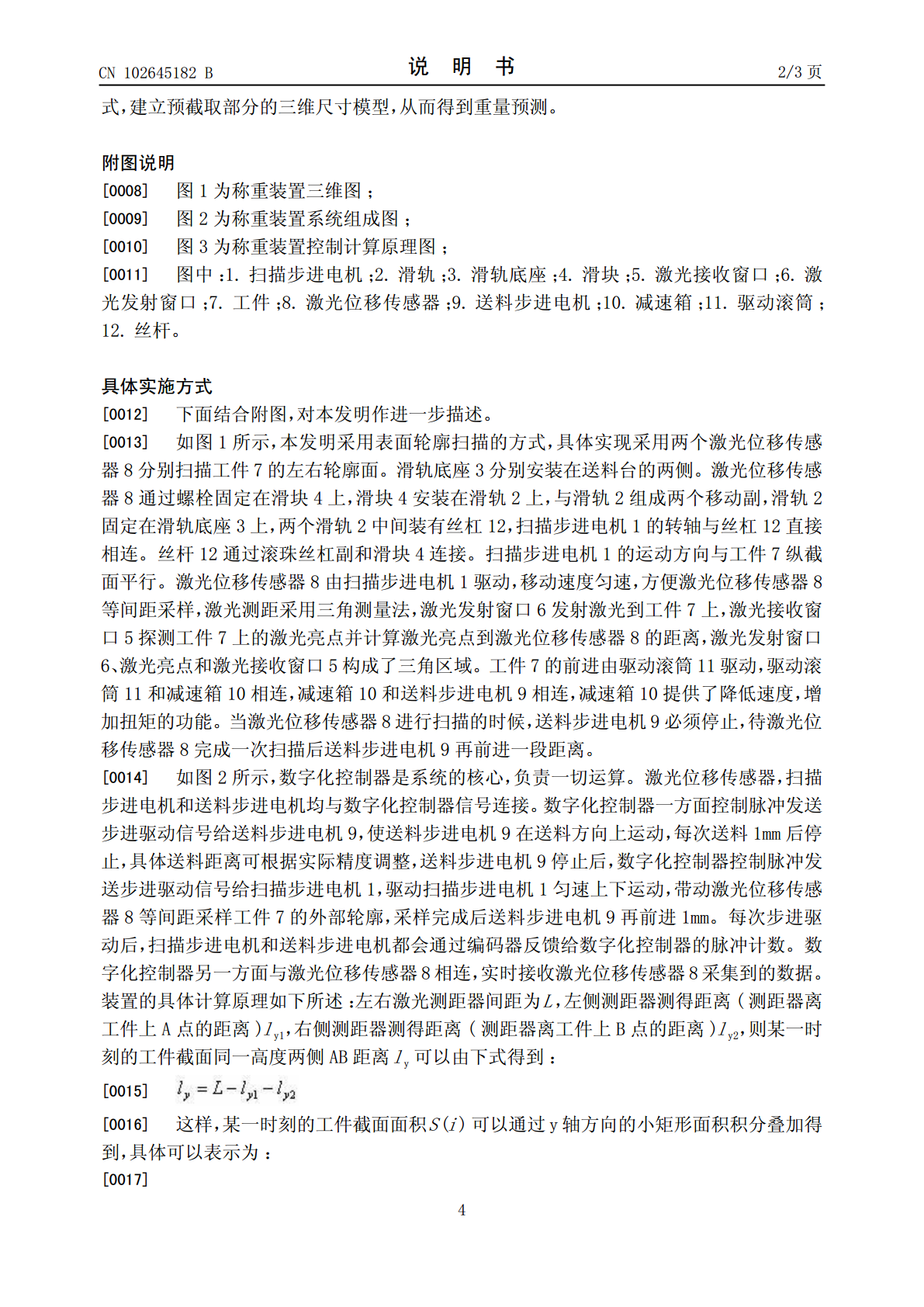
本发明涉及一种表面轮廓扫描式工件预截取部分称重装置。现有的装置实用性不高,精度也比较低。本发明包括数字化控制器,激光位移传感器,扫描步进电机,送料步进电机,支架和送料台。在工件的两侧的支架上装有激光位移传感器,激光位移传感器由扫描步进电机驱动,扫描步进电机的运动方向与工件纵截面平行;送料台由送料步进电机驱动,用于进给工件;激光位移传感器,扫描步进电机和送料步进电机均与数字化控制器信号连接。本发明不会对工件造成损伤,利于长久的测量;激光测距技术速度快,效率高,对环境要求不严格,有利于在各种工况下的测量;装置
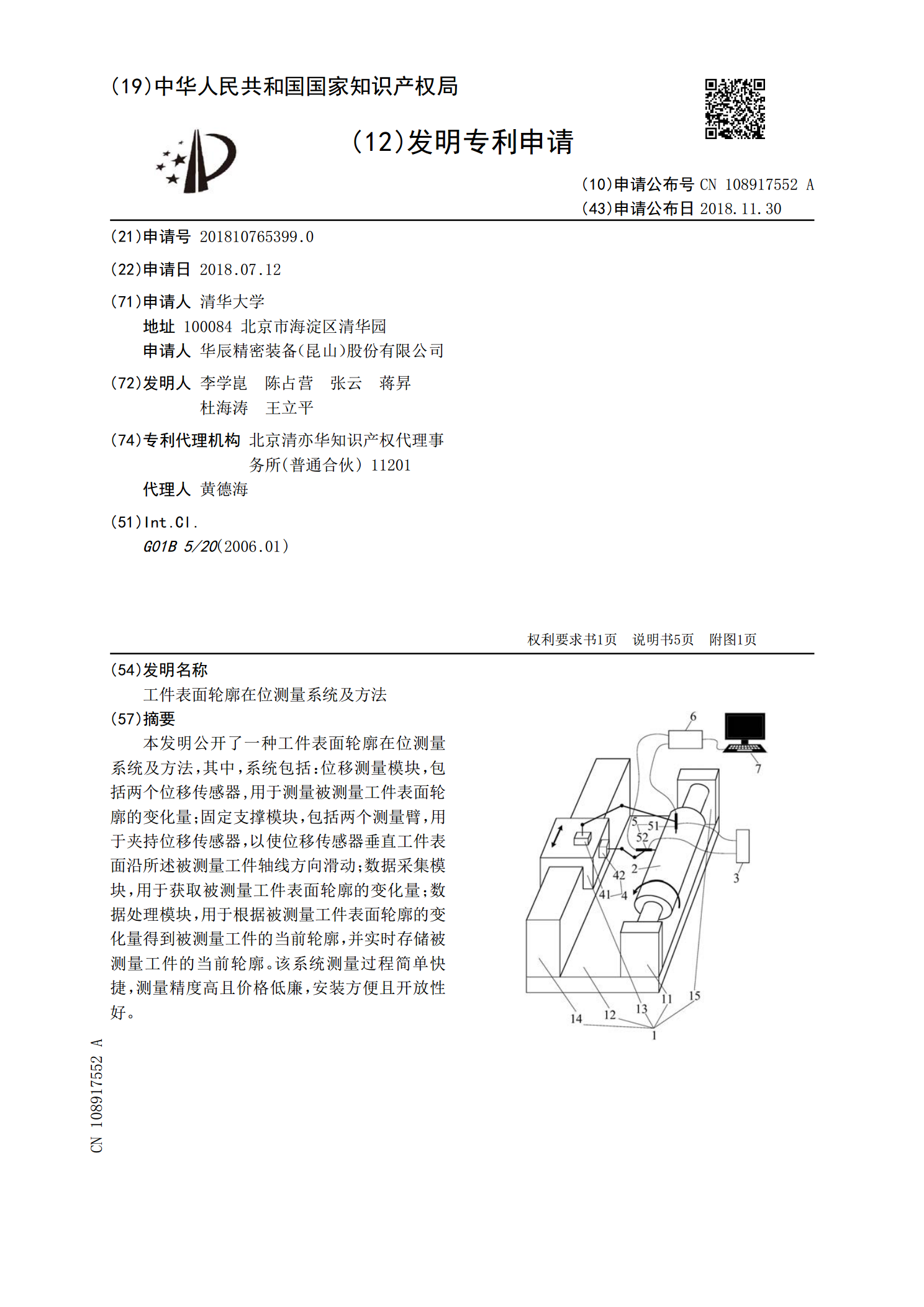
工件表面轮廓在位测量系统及方法.pdf
本发明公开了一种工件表面轮廓在位测量系统及方法,其中,系统包括:位移测量模块,包括两个位移传感器,用于测量被测量工件表面轮廓的变化量;固定支撑模块,包括两个测量臂,用于夹持位移传感器,以使位移传感器垂直工件表面沿所述被测量工件轴线方向滑动;数据采集模块,用于获取被测量工件表面轮廓的变化量;数据处理模块,用于根据被测量工件表面轮廓的变化量得到被测量工件的当前轮廓,并实时存储被测量工件的当前轮廓。该系统测量过程简单快捷,测量精度高且价格低廉,安装方便且开放性好。

工件表面轮廓线获取方法、干涉检测方法和相关装置.pdf
本发明公开了一种工件表面轮廓线获取方法和一种机器人干涉检测方法,通过驱动机器人本体沿着已编辑好的示教轨迹运行,计算机器人末端执行器在工件表面形成的运行轨迹,作为工件的表面轨迹,对表面轨迹进行数据处理,将其近似为工件表面轮廓线,然后根据获得的工件表面轮廓线进行机器人干涉检测,通过在仿真环境中,驱动机器人本体沿着示教轨迹逐点运行,检测机器人与工件表面轮廓线之间是否相交,将相交的轨迹点作为干涉点进行记录并保存。在无需工件三维模型的前提下,即可自动检测出机器人是否与工件发生干涉或碰撞,以及在何处发生干涉,能够降低

抛光工件表面轮廓各频段误差的分离方法.pdf
抛光工件表面轮廓各频段误差的分离方法,涉及光学表面加工方法。1)对采用光学检测装置检测得到的被测光学元件表面的检测曲线进行拟合,得到拟合曲线和残差;2)将残差进行经验模态分解,得到各阶固有模态函数和剩余信号;3)计算各阶固有模态函数的瞬时频率曲线及其平均波长;4)根据各阶固有模态函数的平均波长及其特征将所有固有模态函数分为高、中、低频组,将高频和中频组进行组内叠加得到光学表面轮廓的高频和中频误差;将低频组、剩余信号及拟合曲线叠加得到包含低频误差的面形。
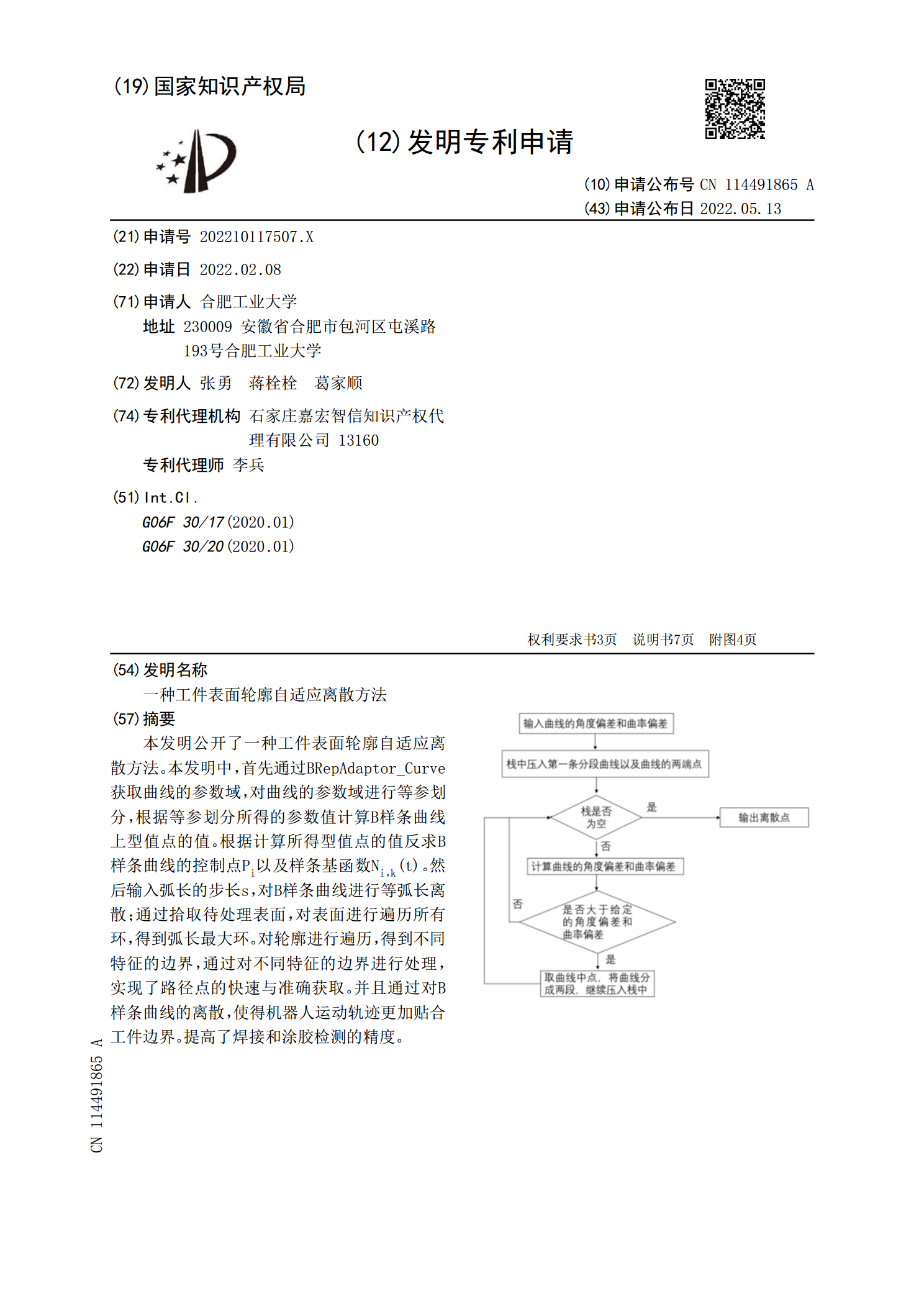
一种工件表面轮廓自适应离散方法.pdf
本发明公开了一种工件表面轮廓自适应离散方法。本发明中,首先通过BRepAdaptor_Curve获取曲线的参数域,对曲线的参数域进行等参划分,根据等参划分所得的参数值计算B样条曲线上型值点的值。根据计算所得型值点的值反求B样条曲线的控制点P