
工件表面轮廓线获取方法、干涉检测方法和相关装置.pdf

一吃****仪凡

1/10
2/10

3/10
4/10
5/10
6/10
7/10
8/10

9/10
10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

工件表面轮廓线获取方法、干涉检测方法和相关装置.pdf
本发明公开了一种工件表面轮廓线获取方法和一种机器人干涉检测方法,通过驱动机器人本体沿着已编辑好的示教轨迹运行,计算机器人末端执行器在工件表面形成的运行轨迹,作为工件的表面轨迹,对表面轨迹进行数据处理,将其近似为工件表面轮廓线,然后根据获得的工件表面轮廓线进行机器人干涉检测,通过在仿真环境中,驱动机器人本体沿着示教轨迹逐点运行,检测机器人与工件表面轮廓线之间是否相交,将相交的轨迹点作为干涉点进行记录并保存。在无需工件三维模型的前提下,即可自动检测出机器人是否与工件发生干涉或碰撞,以及在何处发生干涉,能够降低
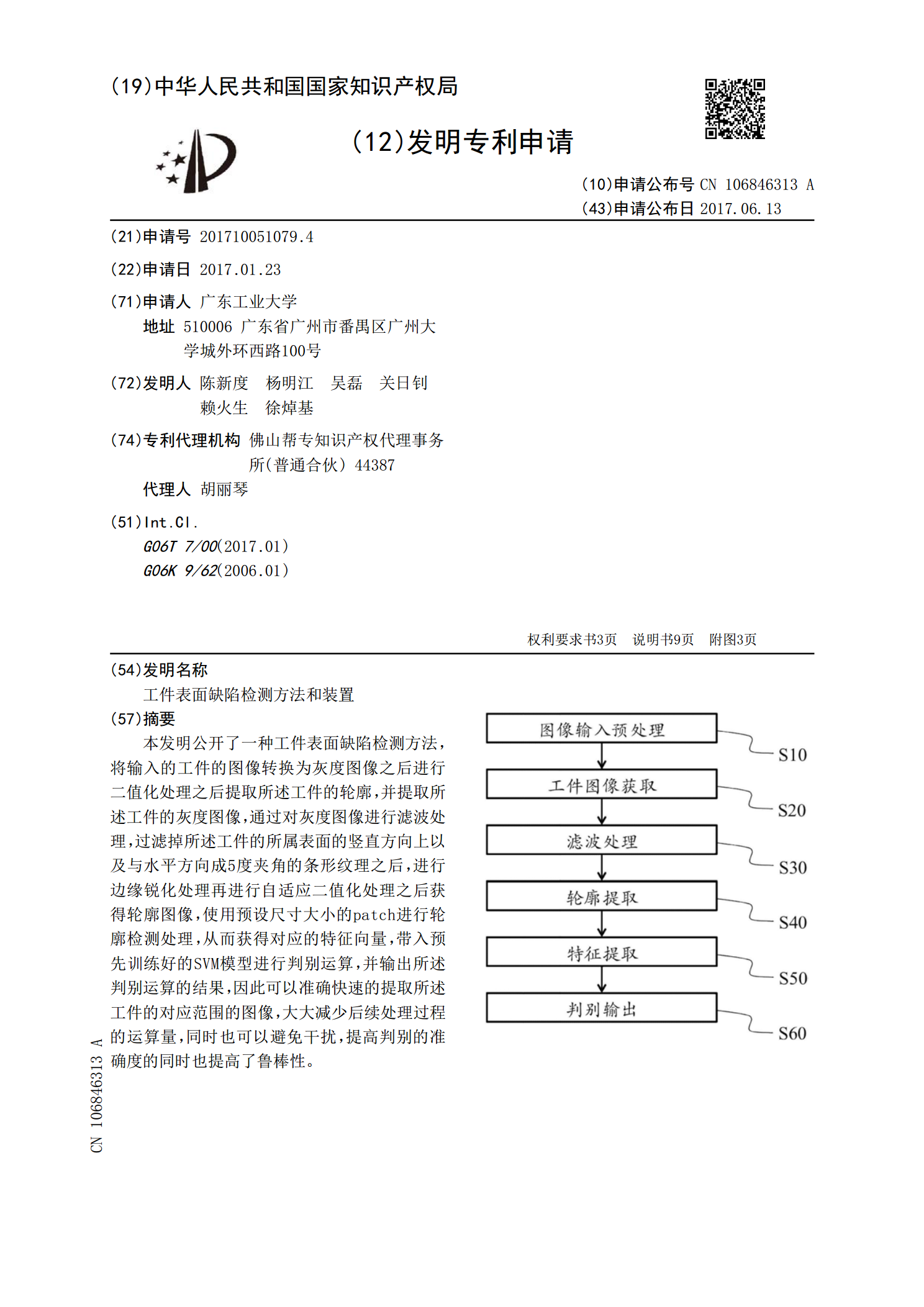
工件表面缺陷检测方法和装置.pdf
本发明公开了一种工件表面缺陷检测方法,将输入的工件的图像转换为灰度图像之后进行二值化处理之后提取所述工件的轮廓,并提取所述工件的灰度图像,通过对灰度图像进行滤波处理,过滤掉所述工件的所属表面的竖直方向上以及与水平方向成5度夹角的条形纹理之后,进行边缘锐化处理再进行自适应二值化处理之后获得轮廓图像,使用预设尺寸大小的patch进行轮廓检测处理,从而获得对应的特征向量,带入预先训练好的SVM模型进行判别运算,并输出所述判别运算的结果,因此可以准确快速的提取所述工件的对应范围的图像,大大减少后续处理过程的运算量
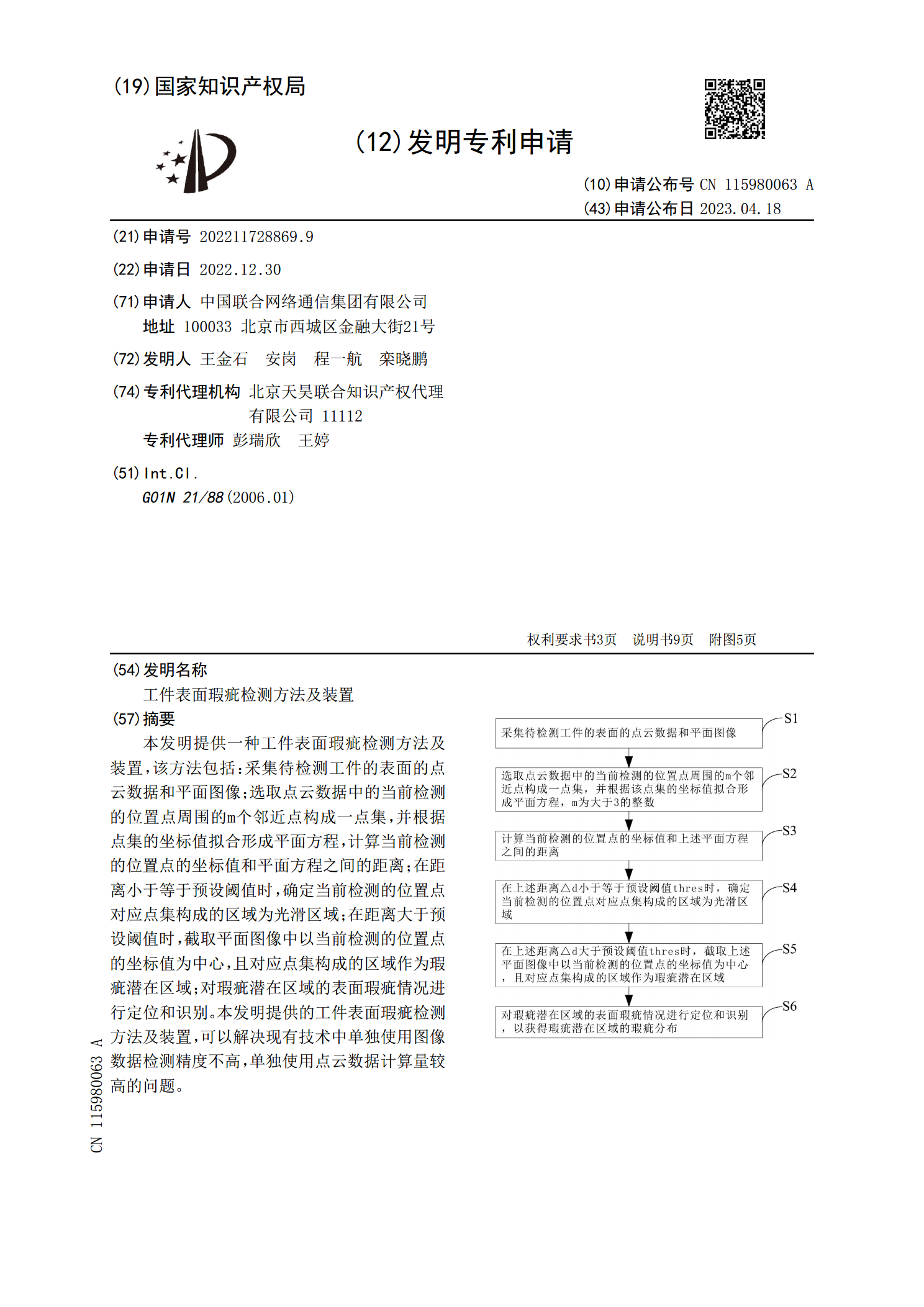
工件表面瑕疵检测方法及装置.pdf
本发明提供一种工件表面瑕疵检测方法及装置,该方法包括:采集待检测工件的表面的点云数据和平面图像;选取点云数据中的当前检测的位置点周围的m个邻近点构成一点集,并根据点集的坐标值拟合形成平面方程,计算当前检测的位置点的坐标值和平面方程之间的距离;在距离小于等于预设阈值时,确定当前检测的位置点对应点集构成的区域为光滑区域;在距离大于预设阈值时,截取平面图像中以当前检测的位置点的坐标值为中心,且对应点集构成的区域作为瑕疵潜在区域;对瑕疵潜在区域的表面瑕疵情况进行定位和识别。本发明提供的工件表面瑕疵检测方法及装置,

获取图像轮廓线的方法及装置.pdf
一种获取图像轮廓线的方法,包括:获取图像,计算所述图像的梯度信息;根据所述梯度信息计算所述图像的结构特征;计算所述结构特征的特征向量;提取所述特征向量的垂直分量,并根据所述特征向量的垂直分量提取所述图像的边缘像素点;根据所述边缘像素点生成轮廓线。此外,还提供了一种获取图像轮廓线的装置。上述获取图像轮廓线的方法和装置可以提高准确度。

工件的表面缺陷检测装置及检测方法、工件的表面检查系统以及程序.pdf
使用多个图像计算多个图像中的统计性的偏差值来制作合成图像,根据所制作的合成图像来进行缺陷检测,其中所述多个图像是通过在利用在作为表面缺陷的检测对象的工件(1)的同一位置引起周期性的亮度变化的照明装置(6)对工件进行照明的状态下摄像单元(8)连续地对工件进行摄像而得到的,并且所述多个图像是在周期性的亮度变化的1个周期中得到的。