
平衡装置.pdf

一吃****成益


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共24页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

齿轮、平衡装置以及带油泵的平衡装置.pdf
一种平衡装置,其中,所述平衡装置具备:具备平衡配重(6c)的平衡驱动轴(6)、与平衡驱动轴(6)一体旋转并经由曲轴齿轮(3)传递来自曲轴(2)的旋转力的主齿轮(5)、以及在平衡驱动轴(6)的旋转轴的方向上的主齿轮(5)的两侧面分别形成的第一环形槽(51)及第二环形槽(52),所述第一环形槽(51)及第二环形槽(52)在从旋转轴的方向观察时至少一部分重叠,并且在相对于旋转轴的径向上至少一部分重叠。根据该结构,能够抑制因齿轮彼此啮合而产生的声音,并抑制齿轮的大型化。

平衡装置.pdf
提供辅助向基准方向恢复躯体的倾斜角的动作的装置。平衡装置包括传感器和至少一个飞轮以及控制器。传感器检测躯体相对于基准方向的倾斜角。至少一个飞轮以平衡装置被安装到人上时所述飞轮的轴线与躯体的横摆轴不平行的方式配置在平衡装置上。躯体的横摆轴相当于躯体的纵向方向。另外,在人直立时,横摆轴与基准方向一致。控制器基于由传感器检测出的倾斜角来改变飞轮的旋转速度。

平衡装置.pdf
一种平衡装置(1),包括基体(6),该基体具有中心置放的接收器(7),待平衡的旋转元件(3、4、5)能够被轴向地插入接收器(7)中从而在接收器(7)中保持旋转元件(3、4、5)使其围绕它的旋转轴线旋转;围绕中心接收器(7)布置的多个液压缸(8)被设置在基体(6)上,利用液压缸,旋转元件特别地涡轮增压器的芯组件(2)能够被固定在中心接收器(7)中。基体(6)具有脱开板(9)的形式,该脱开板具有内板部(10)和弹性地连接到内板部(10)且包围内板部(10)的固定地定位的外板部(11),脱开板具有多个周槽(12
轮平衡装置.pdf
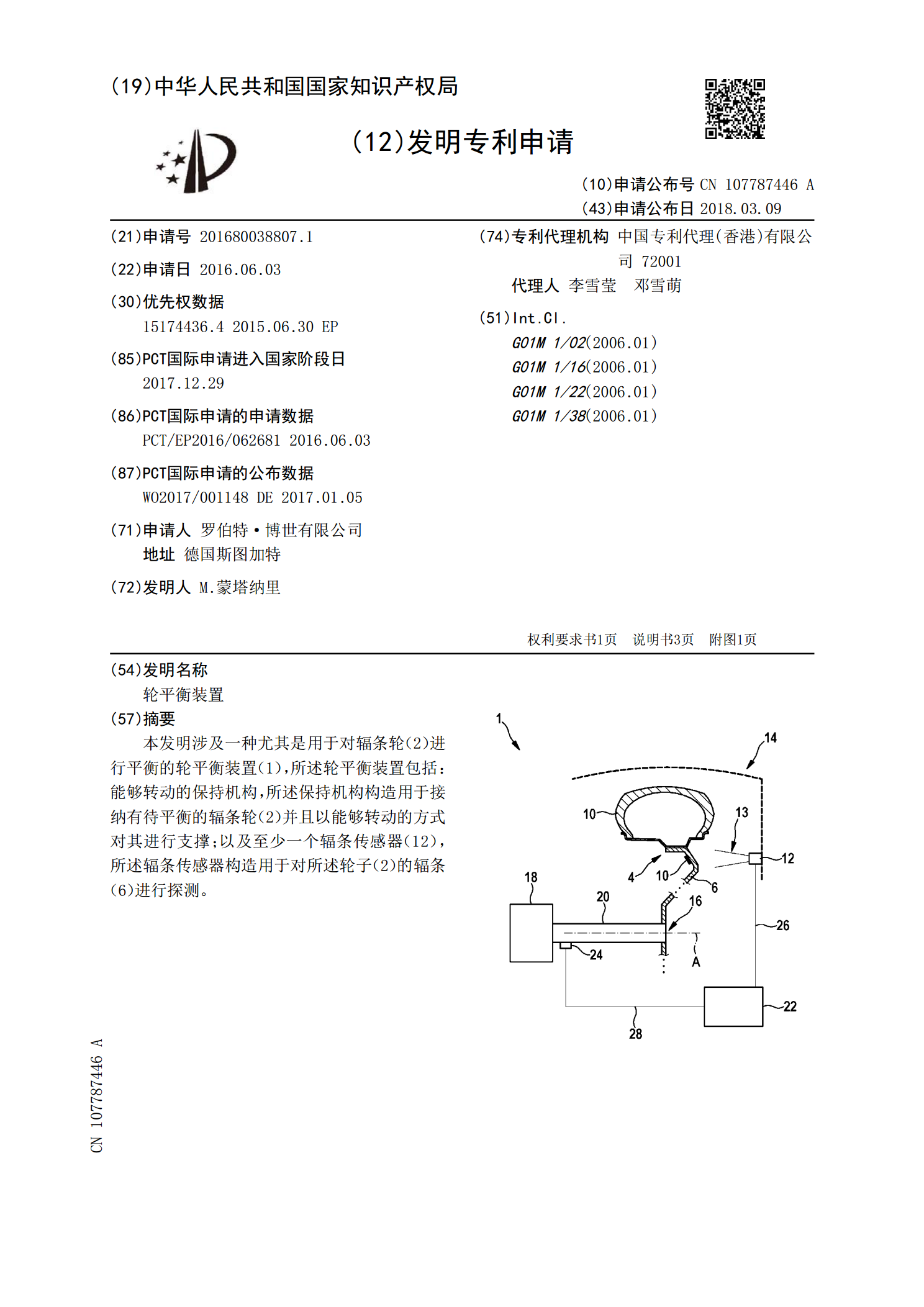
本发明涉及一种尤其是用于对辐条轮(2)进行平衡的轮平衡装置(1),所述轮平衡装置包括:能够转动的保持机构,所述保持机构构造用于接纳有待平衡的辐条轮(2)并且以能够转动的方式对其进行支撑;以及至少一个辐条传感器(12),所述辐条传感器构造用于对所述轮子(2)的辐条(6)进行探测。

环形平衡装置.pdf
一种环形平衡装置,属于轧辊平衡技术领域。包括,导杆(1)、端盖(2)、碟簧(3)、内筒(4)、外筒(5)、压盖(6);碟簧(3)套在导杆(1)上,导杆(1)通过螺纹与压盖(6)连接,碟簧(3)被固定在端盖(2)及压盖(6)之间,内筒(4)和外筒(5)通过铆钉或者销子与压盖(6)连接固定。优点在于,克服了卡滞、易泄漏、寿命较低、成本较高、不环保等问题。具有良好的力学性能、结构简单、加工成本低、寿命长且适用范围广等特点。