
气动履带式管道内行走机构.pdf

猫巷****熙柔


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

气动履带式管道内行走机构.pdf
一种气动履带式管道内行走机构,包括车架、驱动轮和行走轮,车架上沿车架的中心轴方向依次布置两个行走轮、驱动轮和两个行走轮,从轴向上看行走轮位于车架的下半圆,驱动轮位于车架的上半圆;径向分布为两个行走轮关于Y轴对称,行走轮安装在车架上,驱动轮通过一个销轴安装在支撑臂的一端,支撑臂的另一端通过铰链与滑套联接,支撑臂可转动地安装在回转轴上,中心轴座与车架中心轴固定连接,车架中心轴上可滑动套装滑套,滑套与第一驱动气缸连接。气马达安装在机架上,气马达轴、回转轴和驱动轮轴上安装链轮,通过链传动将动力从气马达传递到驱动轮
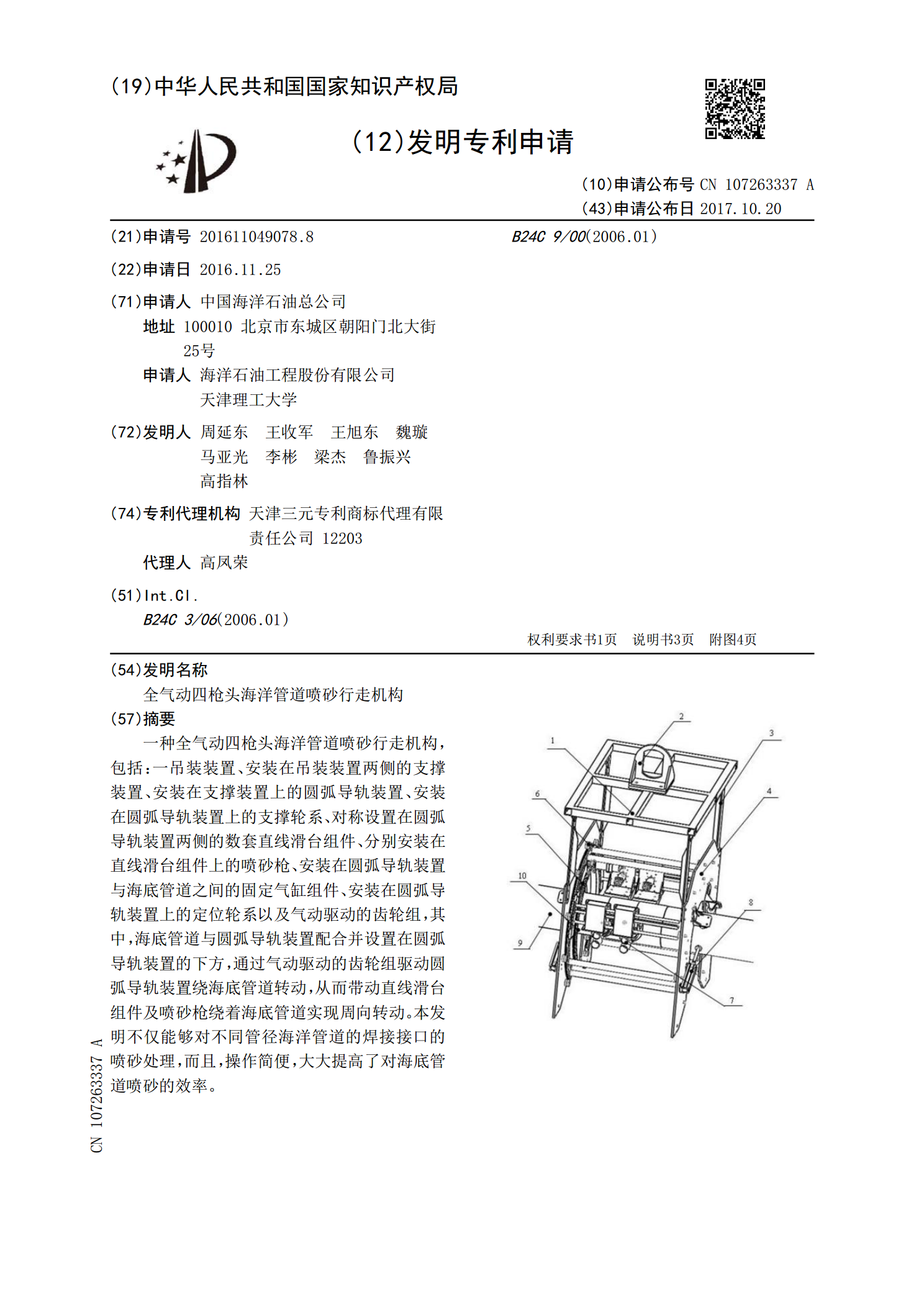
全气动四枪头海洋管道喷砂行走机构.pdf
一种全气动四枪头海洋管道喷砂行走机构,包括:一吊装装置、安装在吊装装置两侧的支撑装置、安装在支撑装置上的圆弧导轨装置、安装在圆弧导轨装置上的支撑轮系、对称设置在圆弧导轨装置两侧的数套直线滑台组件、分别安装在直线滑台组件上的喷砂枪、安装在圆弧导轨装置与海底管道之间的固定气缸组件、安装在圆弧导轨装置上的定位轮系以及气动驱动的齿轮组,其中,海底管道与圆弧导轨装置配合并设置在圆弧导轨装置的下方,通过气动驱动的齿轮组驱动圆弧导轨装置绕海底管道转动,从而带动直线滑台组件及喷砂枪绕着海底管道实现周向转动。本发明不仅能够

履带式行走机构.pdf
本发明涉及尤其用于运行重量大于200吨的挖掘机的履带式行走机构,该行走机构具有驱动轮(3)、导向轮(2)、多个履带轮(4)、多个托带轮(5)以及环链,该环链由多个以铰接方式互连的履带板(7)形成,其中,驱动轮(3)具有沿侧向伸出的齿廓(13’),履带板(7)具有垂直伸出的、彼此平行地延伸的齿(13),所述齿在履带板(7)围绕驱动轮(3)转向时接合到所述齿廓(13’)中,其中,所述履带板(7)在所述齿(13)之间为履带轮(4)和托带轮(5)一方和为导向轮(2)以及驱动轮(3)一方形成分开的运行表面(10,1
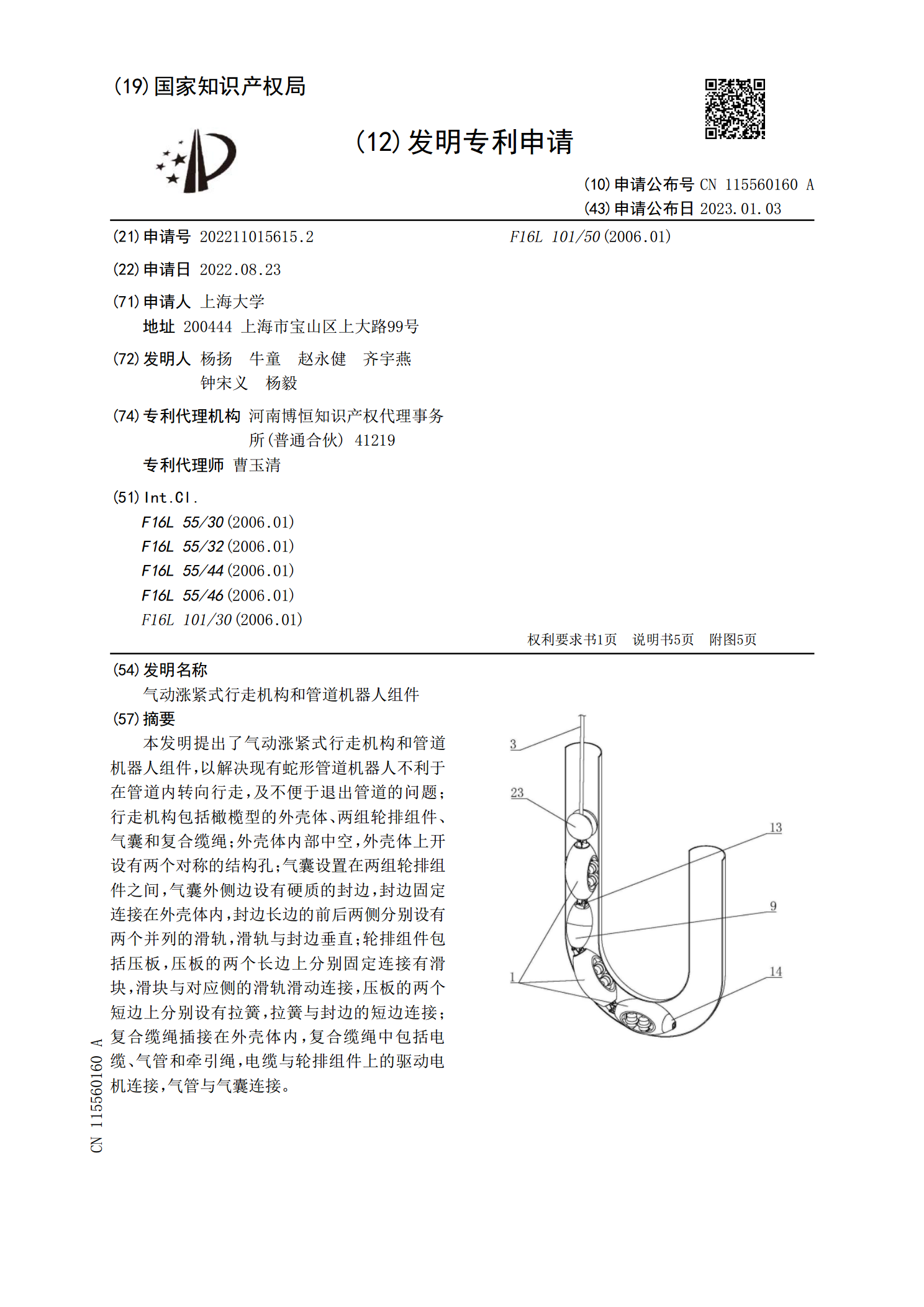
气动涨紧式行走机构和管道机器人组件.pdf
本发明提出了气动涨紧式行走机构和管道机器人组件,以解决现有蛇形管道机器人不利于在管道内转向行走,及不便于退出管道的问题;行走机构包括橄榄型的外壳体、两组轮排组件、气囊和复合缆绳;外壳体内部中空,外壳体上开设有两个对称的结构孔;气囊设置在两组轮排组件之间,气囊外侧边设有硬质的封边,封边固定连接在外壳体内,封边长边的前后两侧分别设有两个并列的滑轨,滑轨与封边垂直;轮排组件包括压板,压板的两个长边上分别固定连接有滑块,滑块与对应侧的滑轨滑动连接,压板的两个短边上分别设有拉簧,拉簧与封边的短边连接;复合缆绳插接在

履带式行走机构及履带车辆.pdf
本发明公开了一种履带式行走机构及履带车辆,该履带式行走机构包括外箱体、内箱体和履带,内箱体嵌套于外箱体的内部,履带套设在所述外箱体上,外箱体的底部设置有第一支重轮,内箱体的底部设置有第二支重轮;外箱体与内箱体之间设置有驱动结构,驱动结构用于在行走机构转向时驱动外箱体相对内箱体上升,以使得外箱体带动所述第一支重轮下方的履带与地面分离,并使得第二支重轮下方的履带保持与地面接触。该履带式行走机构及履带车辆在转向时,外箱体带动所述第一支重轮下方的履带与地面分离,第二支重轮下方的履带与地面接触,减小了履带与地面的接