
气动涨紧式行走机构和管道机器人组件.pdf

是你****噩呀

1/10

2/10
3/10
4/10

5/10

6/10
7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
气动涨紧式行走机构和管道机器人组件.pdf
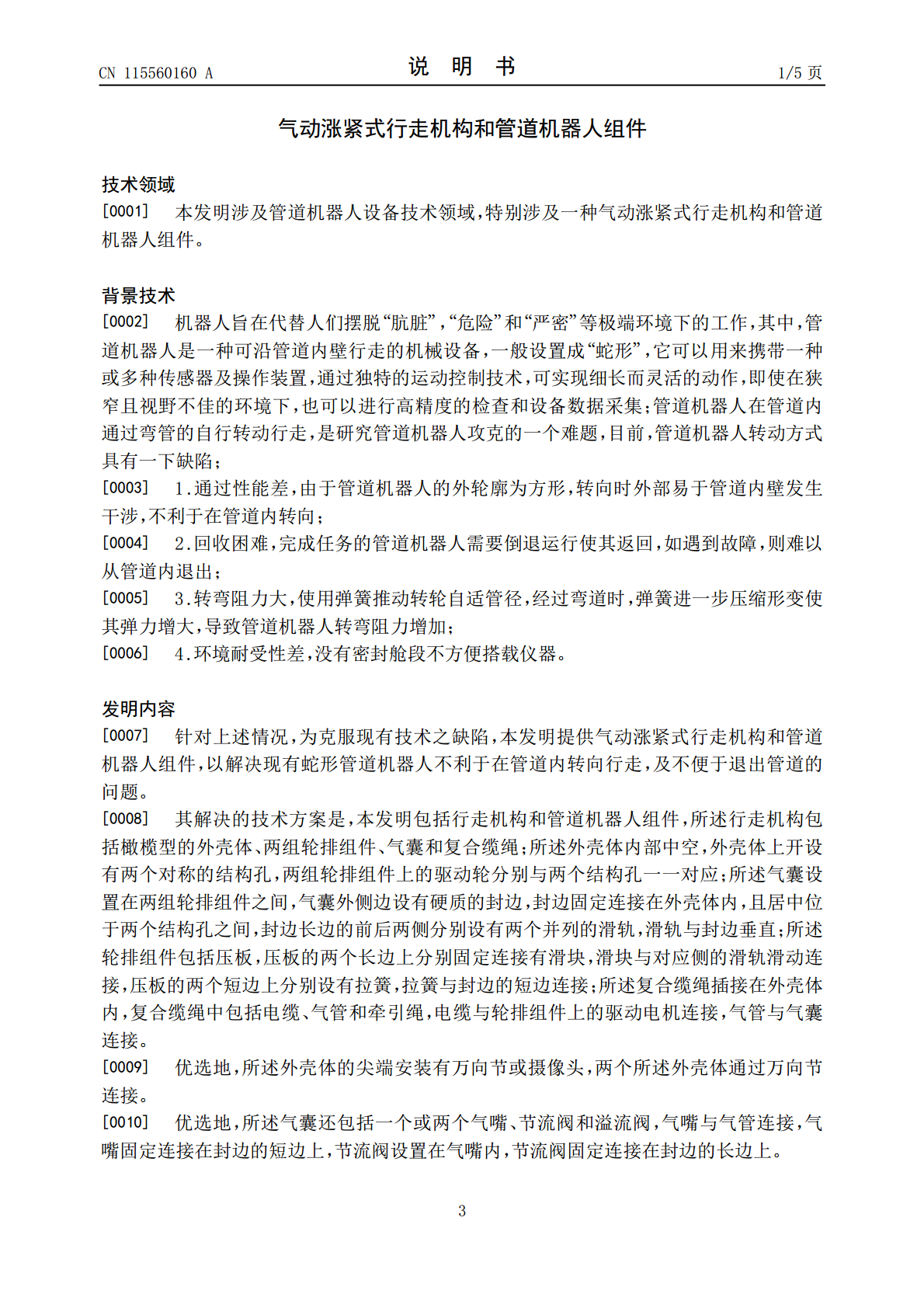
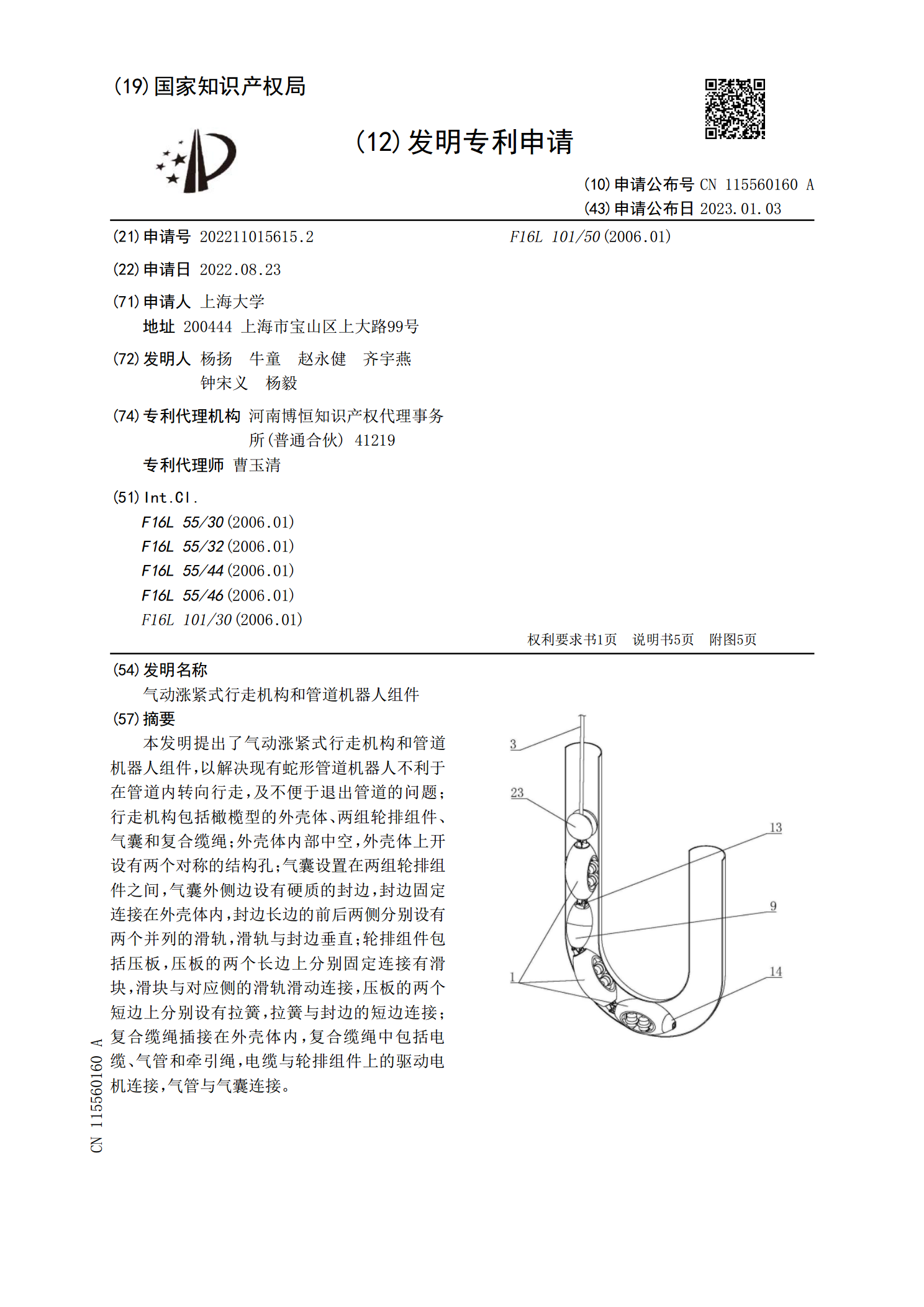
本发明提出了气动涨紧式行走机构和管道机器人组件,以解决现有蛇形管道机器人不利于在管道内转向行走,及不便于退出管道的问题;行走机构包括橄榄型的外壳体、两组轮排组件、气囊和复合缆绳;外壳体内部中空,外壳体上开设有两个对称的结构孔;气囊设置在两组轮排组件之间,气囊外侧边设有硬质的封边,封边固定连接在外壳体内,封边长边的前后两侧分别设有两个并列的滑轨,滑轨与封边垂直;轮排组件包括压板,压板的两个长边上分别固定连接有滑块,滑块与对应侧的滑轨滑动连接,压板的两个短边上分别设有拉簧,拉簧与封边的短边连接;复合缆绳插接在

涨紧装置和履带式机器人.pdf
本发明涉及一种涨紧装置和履带式机器人。涨紧装置包括:涨紧轮;第一滑动单元,其一端通过转轴连接到所述涨紧轮的中心;第二滑动单元,其套设在所述第一滑动单元的外部并与所述第一滑动单元滑动配合,用于将所述涨紧装置安装到所述履带式机器人上;第一调节单元,其安装在所述第一滑动单元上的与所述一端相反的另一端,用以调节第一滑动单元的位置;第二调节单元,所述第一调节单元与所述第二调节单元螺纹连接;以及锁定单元,用以锁定第一调节单元、第一滑动单元和涨紧轮的位置。履带式机器人包括上述涨紧装置。涨紧装置能够调节履带的张紧度,从而

恒压涨紧装置和履带式机器人.pdf
本发明涉及一种恒压涨紧装置和履带式机器人。恒压涨紧装置包括:涨紧轮;第一滑动单元,其第一端通过转轴连接到所述涨紧轮的中心,涨紧轮能够围绕转轴旋转并且能够随第一滑动单元一起移动;第二滑动单元,套设在第一滑动单元的外部并与第一滑动单元滑动配合;调节单元,安装在第一滑动单元上的与第一端相反的第二端,调节单元至少部分伸出第二滑动单元,用以调节第一滑动单元的位置;压力检测单元,设置在第一滑动单元和调节单元之间,控制单元,与所述压力检测单元和调节单元分别连接,用以接收压力检测单元检测的压力,并根据压力控制调节单元的移

涨紧螺栓组件.pdf
一种涨紧螺栓组件,其特征在于,其包括涨紧组件、手柄及弹簧片,涨紧组件与手柄活动连接,手柄与弹簧片固定连接,弹簧片与手柄连接成涨紧螺栓的形状,涨紧组件可用于调节该涨紧螺栓组件与待配合基体的配合精度及自锁效果。本发明通过设置与手柄活动连接的涨紧组件,利用涨紧组件的自锁螺母对限位套或挤压套进行挤压变形,从而达到稳定可靠的自锁效果及高精度配合效果。此外,通过手柄端部的凸轮还可以进一步微调涨紧组件与基体的配合精度及自锁效果。由于其通过自锁螺母及手柄端部的凸轮调节涨紧组件的配合精度,因而其不会影响螺栓组件与基体表面润

气动履带式管道内行走机构.pdf
一种气动履带式管道内行走机构,包括车架、驱动轮和行走轮,车架上沿车架的中心轴方向依次布置两个行走轮、驱动轮和两个行走轮,从轴向上看行走轮位于车架的下半圆,驱动轮位于车架的上半圆;径向分布为两个行走轮关于Y轴对称,行走轮安装在车架上,驱动轮通过一个销轴安装在支撑臂的一端,支撑臂的另一端通过铰链与滑套联接,支撑臂可转动地安装在回转轴上,中心轴座与车架中心轴固定连接,车架中心轴上可滑动套装滑套,滑套与第一驱动气缸连接。气马达安装在机架上,气马达轴、回转轴和驱动轮轴上安装链轮,通过链传动将动力从气马达传递到驱动轮