
一种测力轮对连续测量方法.pdf

雨巷****凝海


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种测力轮对连续测量方法.pdf
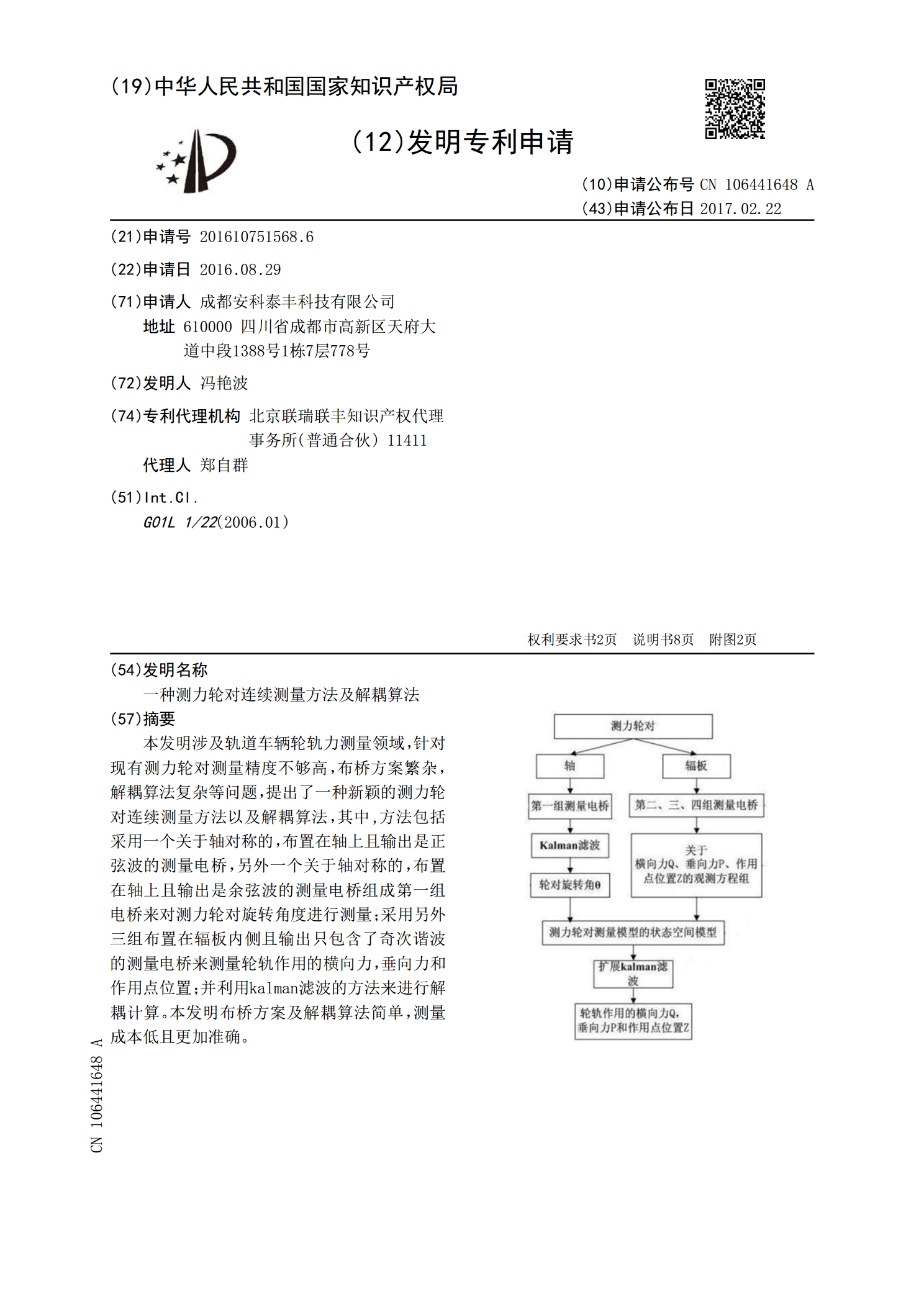
本发明涉及一种测力轮对连续测量方法,针对现有测力轮对测量精度不够高,布桥方案繁杂,解耦算法复杂等问题,提出了一种新颖的测力轮对连续测量方法以及解耦算法,其中,方法包括采用一个关于轴对称的,布置在轴上且输出是正弦波的测量电桥,另外一个关于轴对称的,布置在轴上且输出是余弦波的测量电桥组成第一组电桥来对测力轮对旋转角度进行测量;采用另外三组布置在辐板内侧且输出只包含了奇次谐波的测量电桥来测量轮轨作用的横向力,垂向力和作用点位置;并利用kalman滤波的方法来进行解耦计算。本发明布桥方案及解耦算法简单,测量成本低

一种测力轮对的连续测量方法及装置.pdf
本发明涉及铁道机车车辆轮轨力测量领域,为了解决现有技术中测力轮对测量方法繁杂,测量精度不够高等问题,提供了一种新型的测力轮对的连续测量方法及装置,其中方法包括采用在同周期内一个测量电桥的灵敏度为正弦形,另一个测量电桥的灵敏度为余弦形的第一组双桥路对轮轨垂向力进行测量;采用在同周期内一个测量电桥的灵敏度为正弦形,另一个测量电桥的灵敏度为余弦形的第二组双桥路对轮轨横向力进行测量。本发明实施例的有益效果在于,由于对垂向力、横向力使用了同样周期的双桥路的测量手段,并经过迭加合成处理,就可以使得在车轮旋转的整个轮周
一种基于测力轮对的轮轨力连续测量方法.pdf
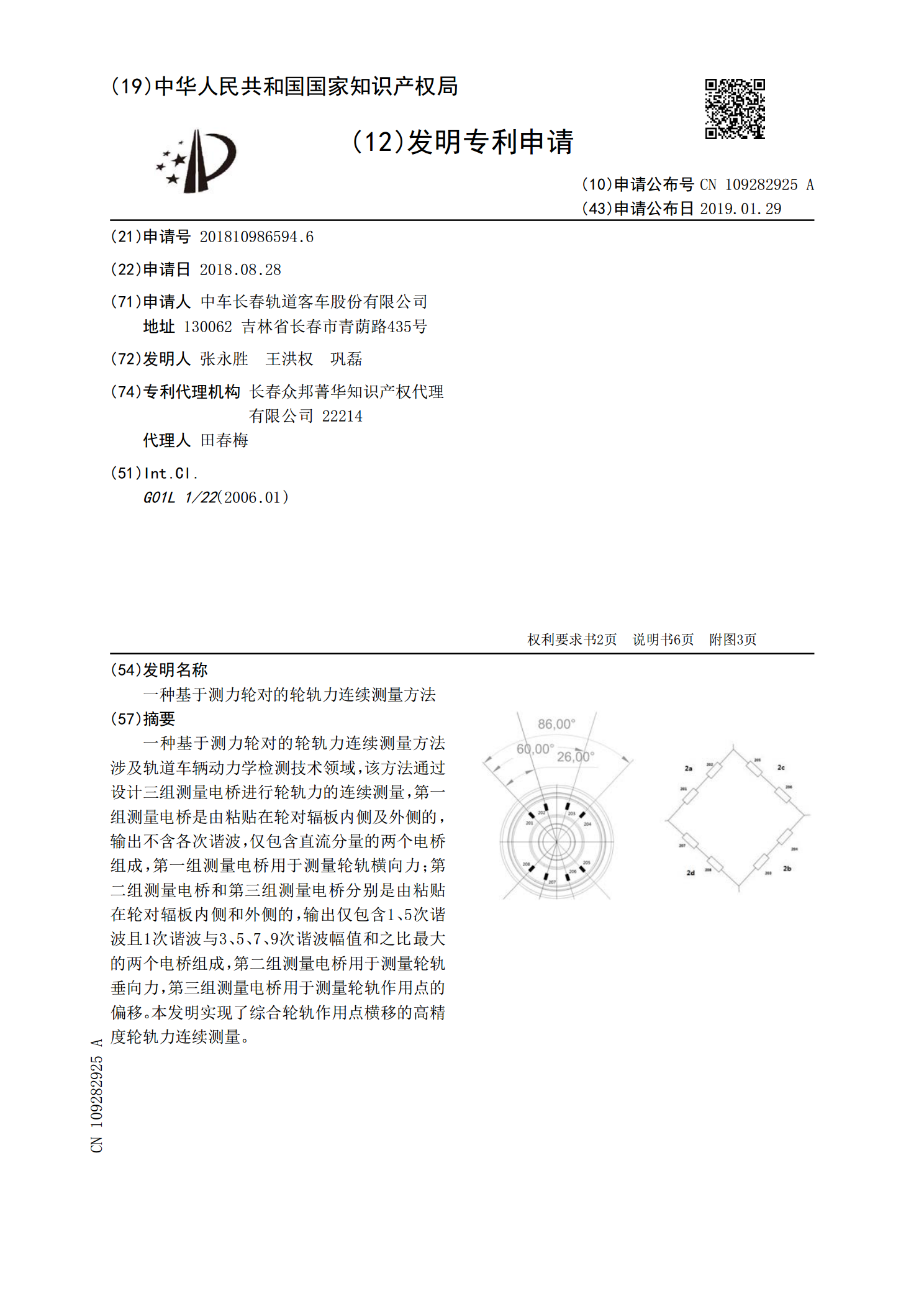
一种基于测力轮对的轮轨力连续测量方法涉及轨道车辆动力学检测技术领域,该方法通过设计三组测量电桥进行轮轨力的连续测量,第一组测量电桥是由粘贴在轮对辐板内侧及外侧的,输出不含各次谐波,仅包含直流分量的两个电桥组成,第一组测量电桥用于测量轮轨横向力;第二组测量电桥和第三组测量电桥分别是由粘贴在轮对辐板内侧和外侧的,输出仅包含1、5次谐波且1次谐波与3、5、7、9次谐波幅值和之比最大的两个电桥组成,第二组测量电桥用于测量轮轨垂向力,第三组测量电桥用于测量轮轨作用点的偏移。本发明实现了综合轮轨作用点横移的高精度轮轨
一种测力轮对连续测量方法及解耦算法.pdf
本发明涉及轨道车辆轮轨力测量领域,针对现有测力轮对测量精度不够高,布桥方案繁杂,解耦算法复杂等问题,提出了一种新颖的测力轮对连续测量方法以及解耦算法,其中,方法包括采用一个关于轴对称的,布置在轴上且输出是正弦波的测量电桥,另外一个关于轴对称的,布置在轴上且输出是余弦波的测量电桥组成第一组电桥来对测力轮对旋转角度进行测量;采用另外三组布置在辐板内侧且输出只包含了奇次谐波的测量电桥来测量轮轨作用的横向力,垂向力和作用点位置;并利用kalman滤波的方法来进行解耦计算。本发明布桥方案及解耦算法简单,测量成本低且
一种测力轮对标定试验台轮对径向限位装置.pdf
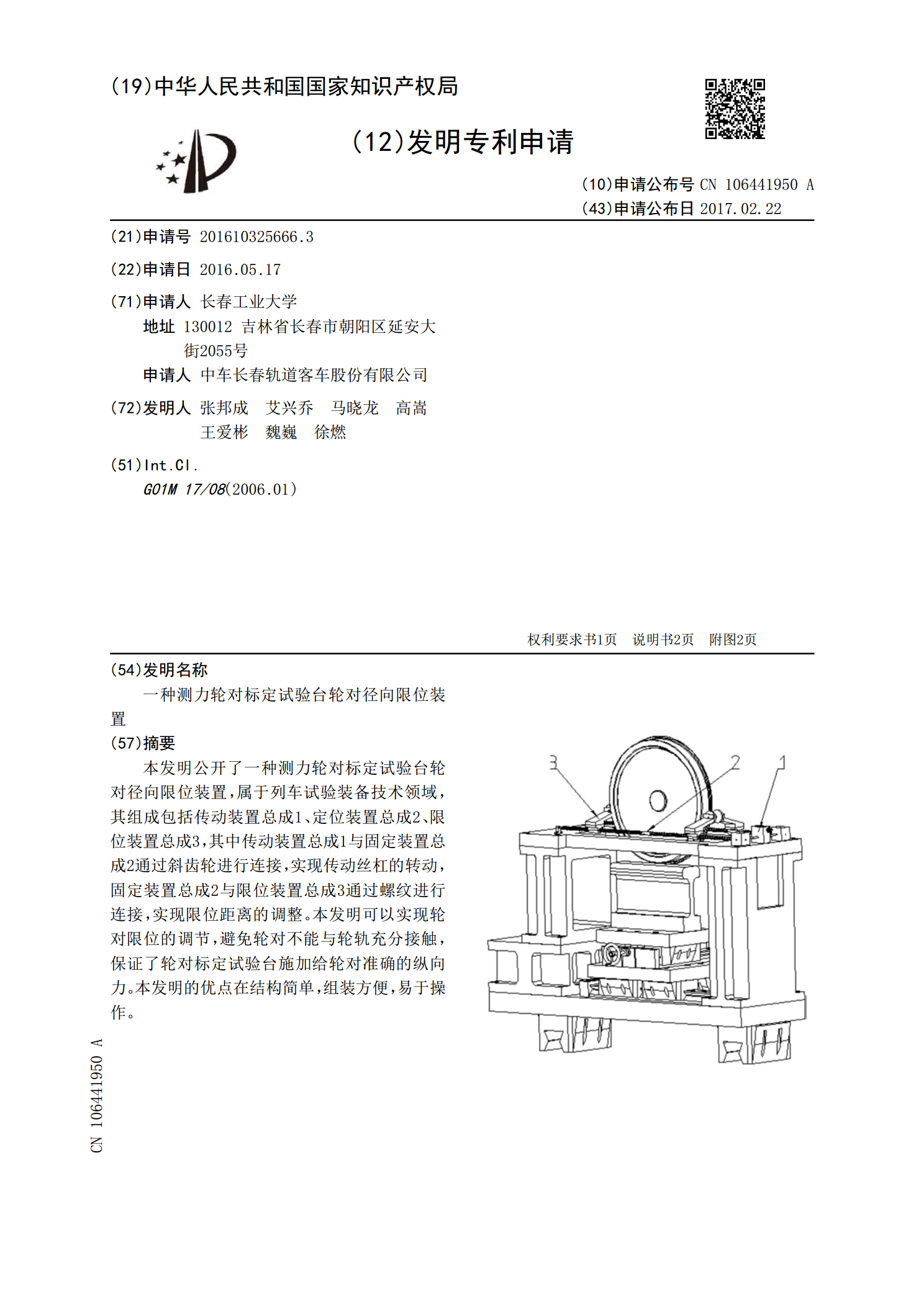
本发明公开了一种测力轮对标定试验台轮对径向限位装置,属于列车试验装备技术领域,其组成包括传动装置总成1、定位装置总成2、限位装置总成3,其中传动装置总成1与固定装置总成2通过斜齿轮进行连接,实现传动丝杠的转动,固定装置总成2与限位装置总成3通过螺纹进行连接,实现限位距离的调整。本发明可以实现轮对限位的调节,避免轮对不能与轮轨充分接触,保证了轮对标定试验台施加给轮对准确的纵向力。本发明的优点在结构简单,组装方便,易于操作。