
一种环抱式爬杆机器人.pdf

和裕****az

1/10
2/10
3/10
4/10

5/10

6/10

7/10
8/10

9/10
10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种环抱式爬杆机器人.pdf
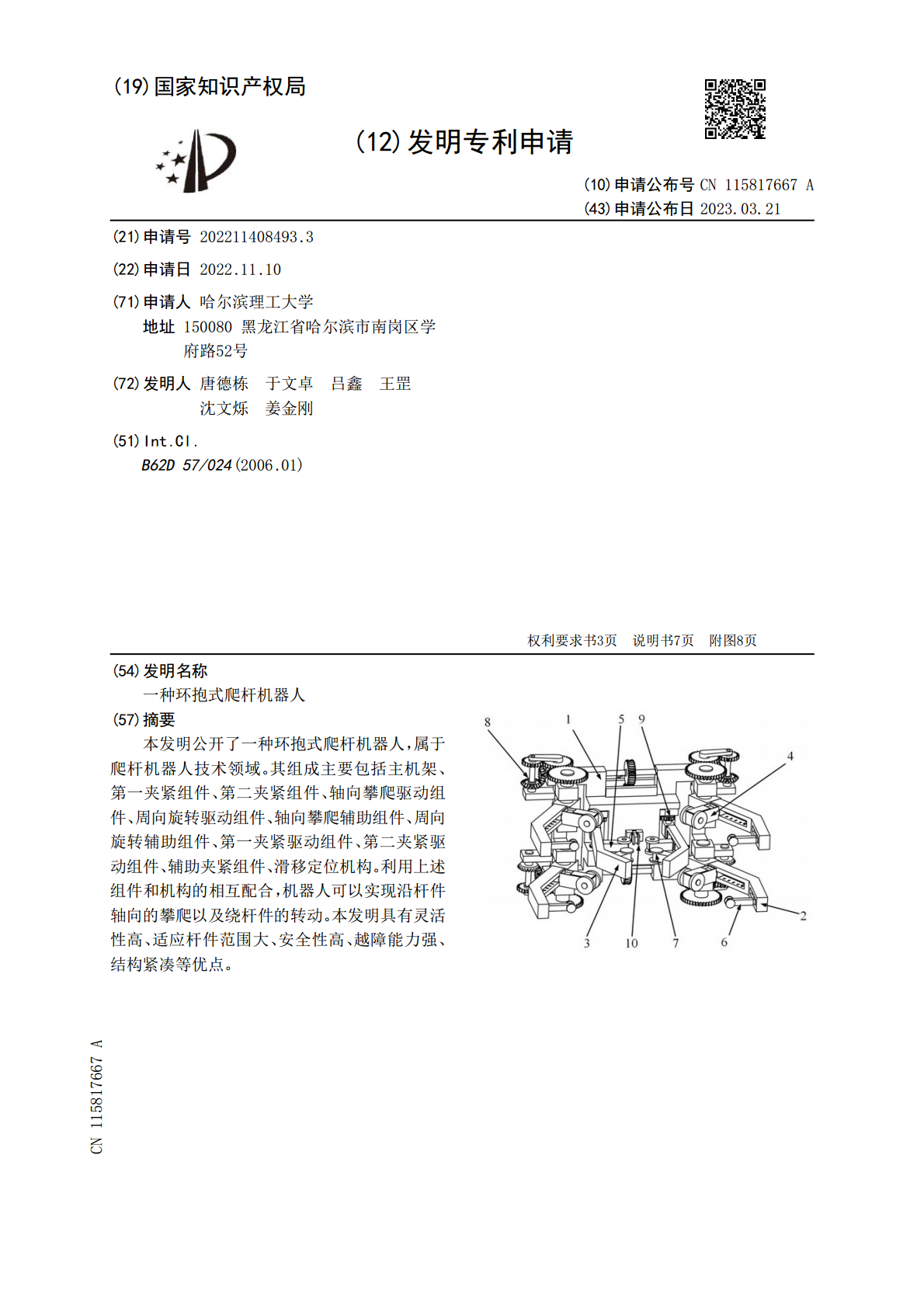
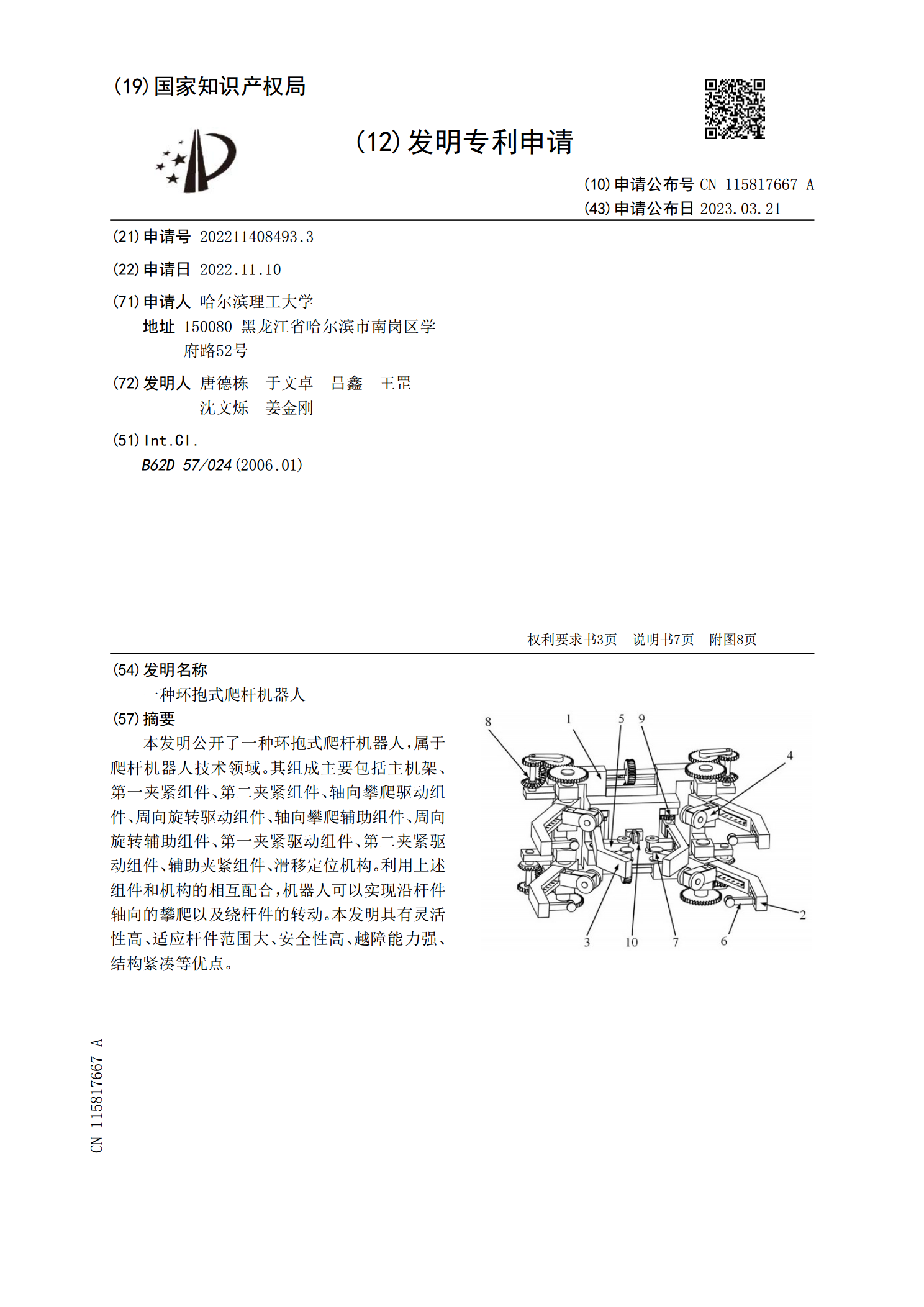
本发明公开了一种环抱式爬杆机器人,属于爬杆机器人技术领域。其组成主要包括主机架、第一夹紧组件、第二夹紧组件、轴向攀爬驱动组件、周向旋转驱动组件、轴向攀爬辅助组件、周向旋转辅助组件、第一夹紧驱动组件、第二夹紧驱动组件、辅助夹紧组件、滑移定位机构。利用上述组件和机构的相互配合,机器人可以实现沿杆件轴向的攀爬以及绕杆件的转动。本发明具有灵活性高、适应杆件范围大、安全性高、越障能力强、结构紧凑等优点。
一种仿生式爬杆机器人.pdf
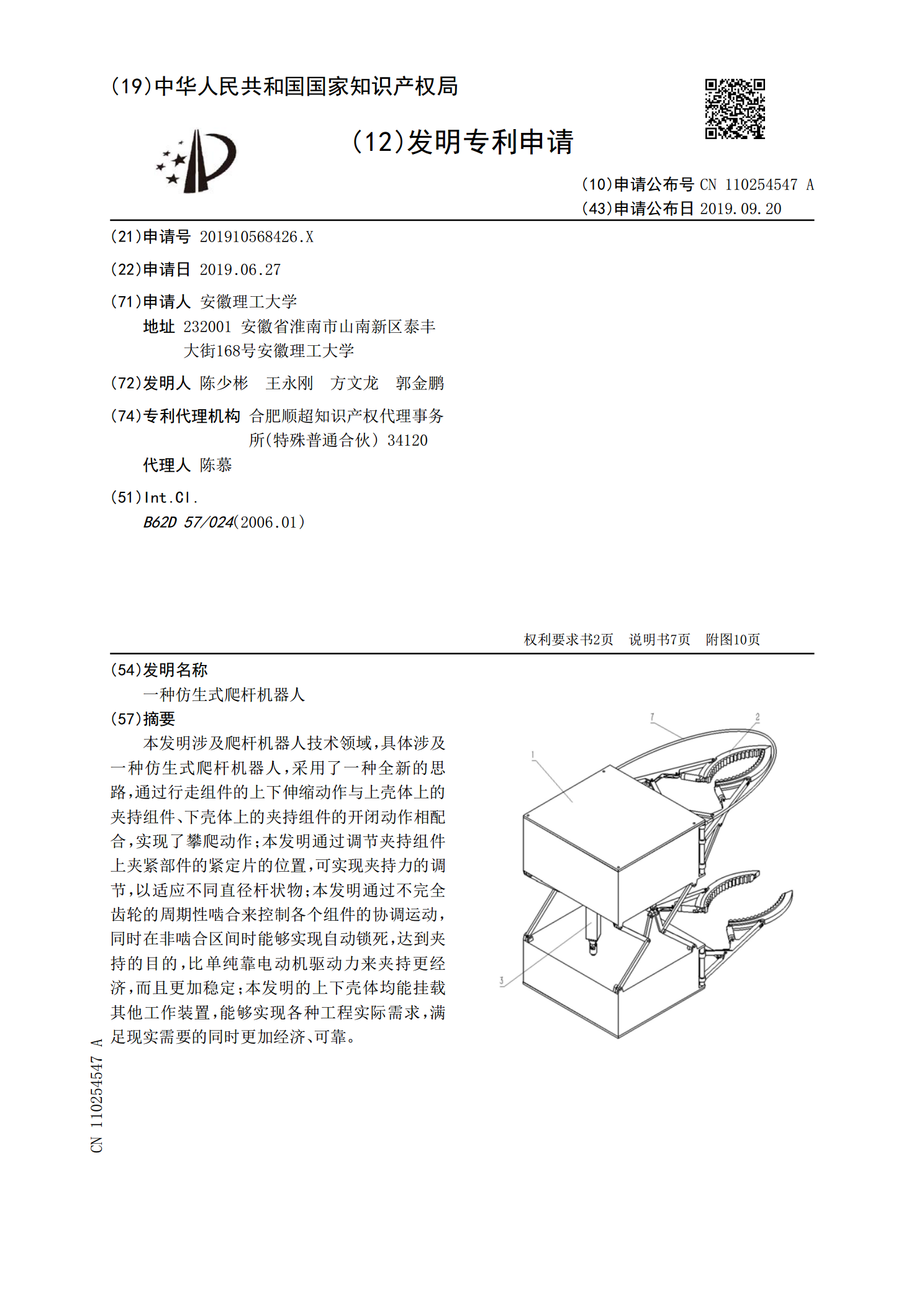
本发明涉及爬杆机器人技术领域,具体涉及一种仿生式爬杆机器人,采用了一种全新的思路,通过行走组件的上下伸缩动作与上壳体上的夹持组件、下壳体上的夹持组件的开闭动作相配合,实现了攀爬动作;本发明通过调节夹持组件上夹紧部件的紧定片的位置,可实现夹持力的调节,以适应不同直径杆状物;本发明通过不完全齿轮的周期性啮合来控制各个组件的协调运动,同时在非啮合区间时能够实现自动锁死,达到夹持的目的,比单纯靠电动机驱动力来夹持更经济,而且更加稳定;本发明的上下壳体均能挂载其他工作装置,能够实现各种工程实际需求,满足现实需要的同
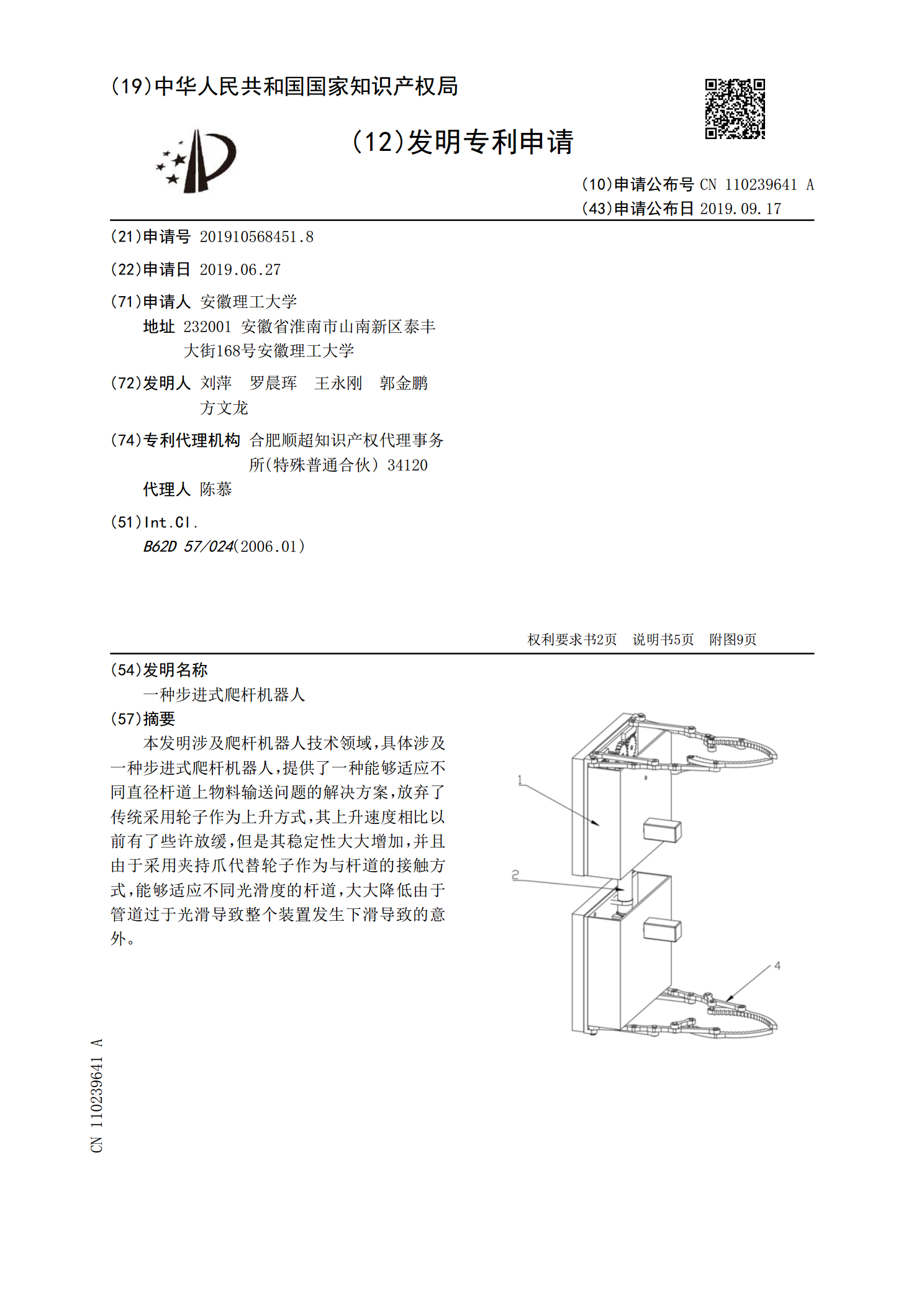
一种步进式爬杆机器人.pdf
本发明涉及爬杆机器人技术领域,具体涉及一种步进式爬杆机器人,提供了一种能够适应不同直径杆道上物料输送问题的解决方案,放弃了传统采用轮子作为上升方式,其上升速度相比以前有了些许放缓,但是其稳定性大大增加,并且由于采用夹持爪代替轮子作为与杆道的接触方式,能够适应不同光滑度的杆道,大大降低由于管道过于光滑导致整个装置发生下滑导致的意外。
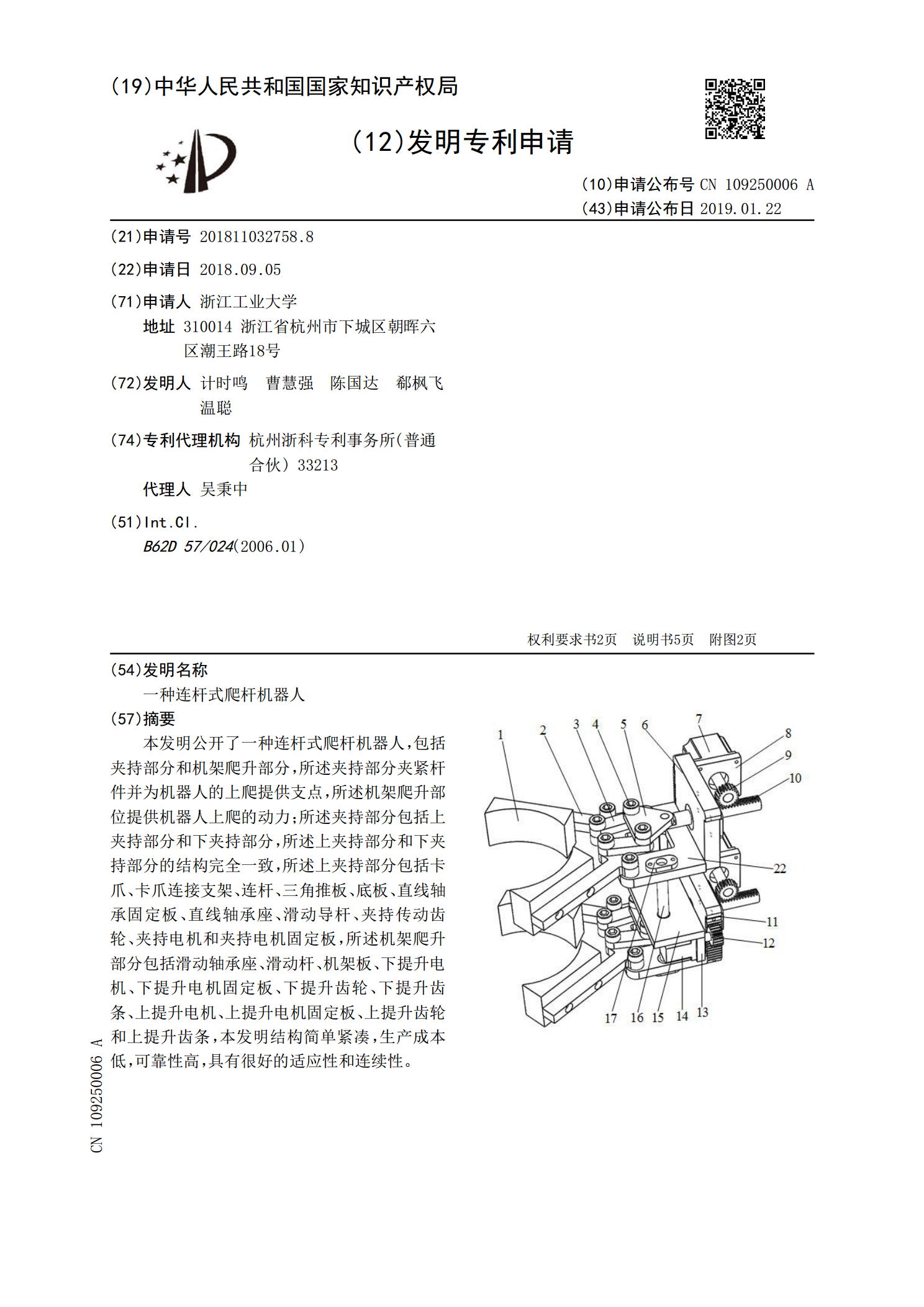
一种连杆式爬杆机器人.pdf
本发明公开了一种连杆式爬杆机器人,包括夹持部分和机架爬升部分,所述夹持部分夹紧杆件并为机器人的上爬提供支点,所述机架爬升部位提供机器人上爬的动力;所述夹持部分包括上夹持部分和下夹持部分,所述上夹持部分和下夹持部分的结构完全一致,所述上夹持部分包括卡爪、卡爪连接支架、连杆、三角推板、底板、直线轴承固定板、直线轴承座、滑动导杆、夹持传动齿轮、夹持电机和夹持电机固定板,所述机架爬升部分包括滑动轴承座、滑动杆、机架板、下提升电机、下提升电机固定板、下提升齿轮、下提升齿条、上提升电机、上提升电机固定板、上提升齿轮和
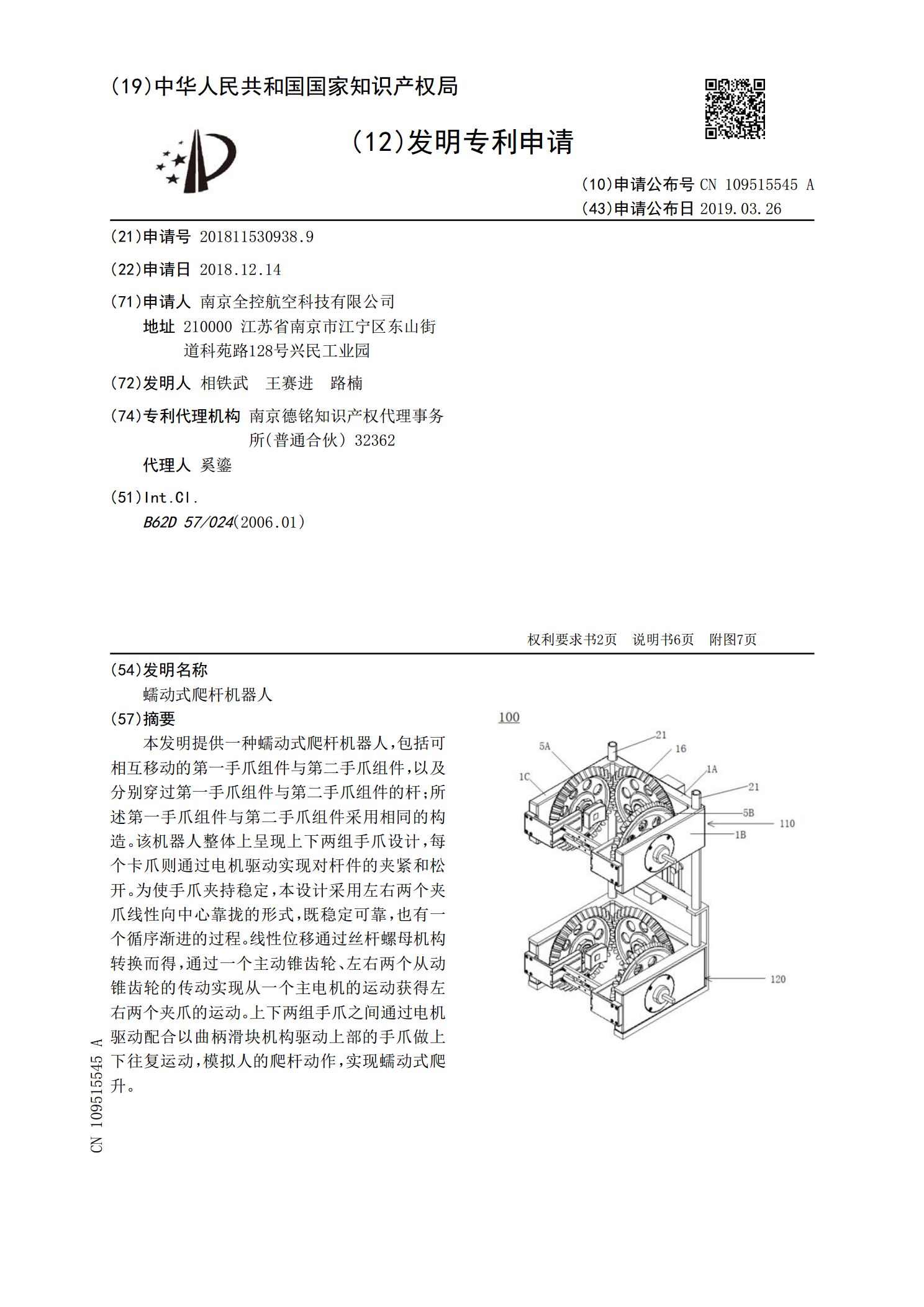
蠕动式爬杆机器人.pdf
本发明提供一种蠕动式爬杆机器人,包括可相互移动的第一手爪组件与第二手爪组件,以及分别穿过第一手爪组件与第二手爪组件的杆;所述第一手爪组件与第二手爪组件采用相同的构造。该机器人整体上呈现上下两组手爪设计,每个卡爪则通过电机驱动实现对杆件的夹紧和松开。为使手爪夹持稳定,本设计采用左右两个夹爪线性向中心靠拢的形式,既稳定可靠,也有一个循序渐进的过程。线性位移通过丝杆螺母机构转换而得,通过一个主动锥齿轮、左右两个从动锥齿轮的传动实现从一个主电机的运动获得左右两个夹爪的运动。上下两组手爪之间通过电机驱动配合以曲柄滑