
一种六足楼梯攀爬轮椅.pdf

贤惠****66


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种六足楼梯攀爬轮椅.pdf
一种六足楼梯攀爬轮椅系统,属于助老助残服务机器人领域。其包括轮椅、3条椅前侧腿、3条椅背侧腿、电源控制器箱;所述电源控制器箱安装在轮椅的座位下面,内置电源和控制器;所述3条椅前侧腿分左中右均匀布置在电源控制器箱靠近轮椅的前侧,由髋关节、大腿、膝关节、小腿、踝关节和脚部组成,其大腿和小腿部分还包含由滚珠丝杠螺母机构实现的伸缩关节;所述3条椅背侧腿分左中右均匀布置在电源控制器箱靠近轮椅的背侧,由髋关节、大腿、膝关节、小腿、踝关节和脚部组成;本发明保证轮椅座位在整个楼梯攀爬过程中始终处于水平状态,保证乘员乘坐的
一种可攀爬楼梯轮椅.pdf
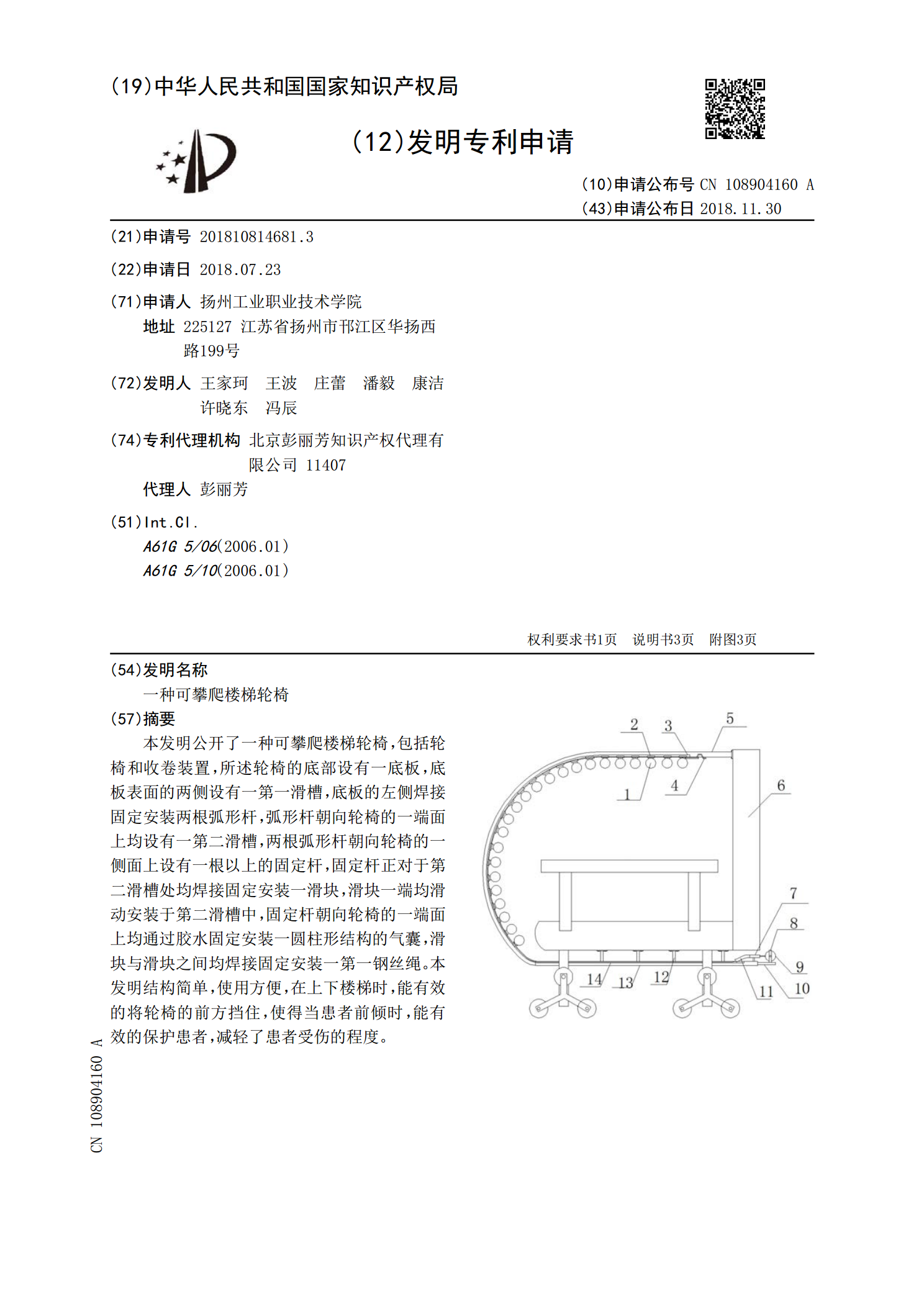
本发明公开了一种可攀爬楼梯轮椅,包括轮椅和收卷装置,所述轮椅的底部设有一底板,底板表面的两侧设有一第一滑槽,底板的左侧焊接固定安装两根弧形杆,弧形杆朝向轮椅的一端面上均设有一第二滑槽,两根弧形杆朝向轮椅的一侧面上设有一根以上的固定杆,固定杆正对于第二滑槽处均焊接固定安装一滑块,滑块一端均滑动安装于第二滑槽中,固定杆朝向轮椅的一端面上均通过胶水固定安装一圆柱形结构的气囊,滑块与滑块之间均焊接固定安装一第一钢丝绳。本发明结构简单,使用方便,在上下楼梯时,能有效的将轮椅的前方挡住,使得当患者前倾时,能有效的保护
履带式楼梯攀爬轮椅.pdf
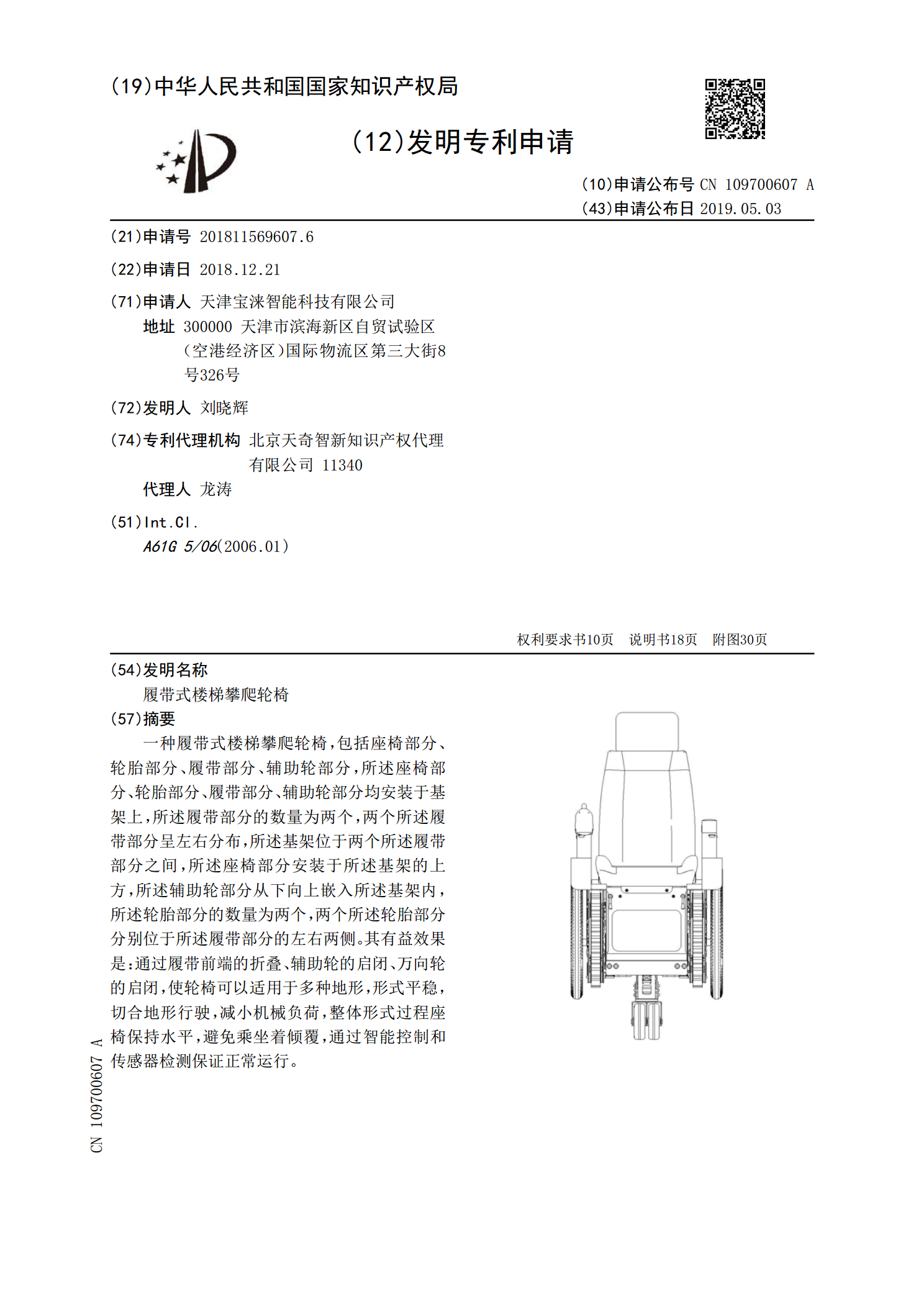
一种履带式楼梯攀爬轮椅,包括座椅部分、轮胎部分、履带部分、辅助轮部分,所述座椅部分、轮胎部分、履带部分、辅助轮部分均安装于基架上,所述履带部分的数量为两个,两个所述履带部分呈左右分布,所述基架位于两个所述履带部分之间,所述座椅部分安装于所述基架的上方,所述辅助轮部分从下向上嵌入所述基架内,所述轮胎部分的数量为两个,两个所述轮胎部分分别位于所述履带部分的左右两侧。其有益效果是:通过履带前端的折叠、辅助轮的启闭、万向轮的启闭,使轮椅可以适用于多种地形,形式平稳,切合地形行驶,减小机械负荷,整体形式过程座椅保持
一种新型的可攀爬楼梯轮椅.pdf
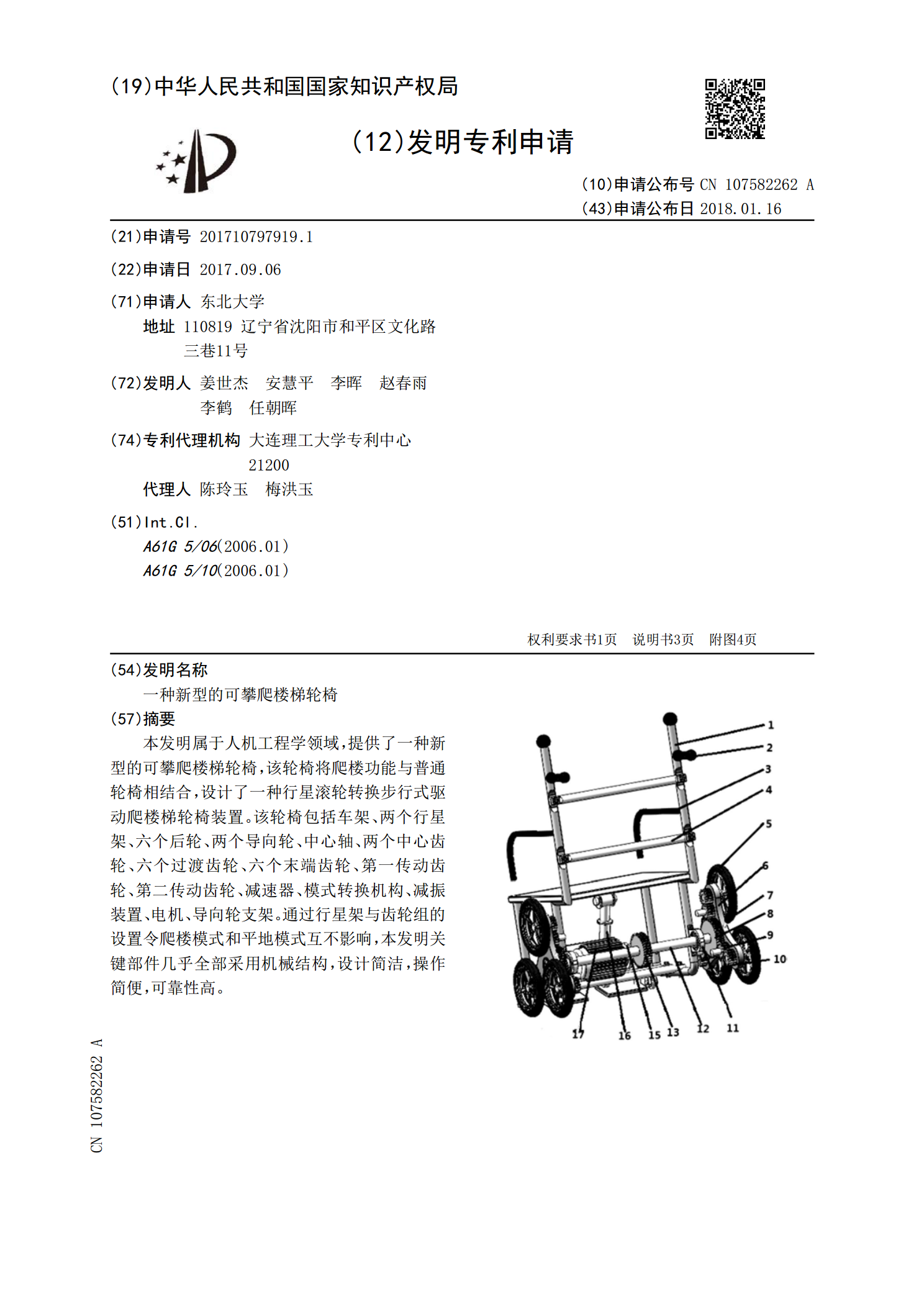
本发明属于人机工程学领域,提供了一种新型的可攀爬楼梯轮椅,该轮椅将爬楼功能与普通轮椅相结合,设计了一种行星滚轮转换步行式驱动爬楼梯轮椅装置。该轮椅包括车架、两个行星架、六个后轮、两个导向轮、中心轴、两个中心齿轮、六个过渡齿轮、六个末端齿轮、第一传动齿轮、第二传动齿轮、减速器、模式转换机构、减振装置、电机、导向轮支架。通过行星架与齿轮组的设置令爬楼模式和平地模式互不影响,本发明关键部件几乎全部采用机械结构,设计简洁,操作简便,可靠性高。
一种新型的可攀爬楼梯的轮椅.pdf
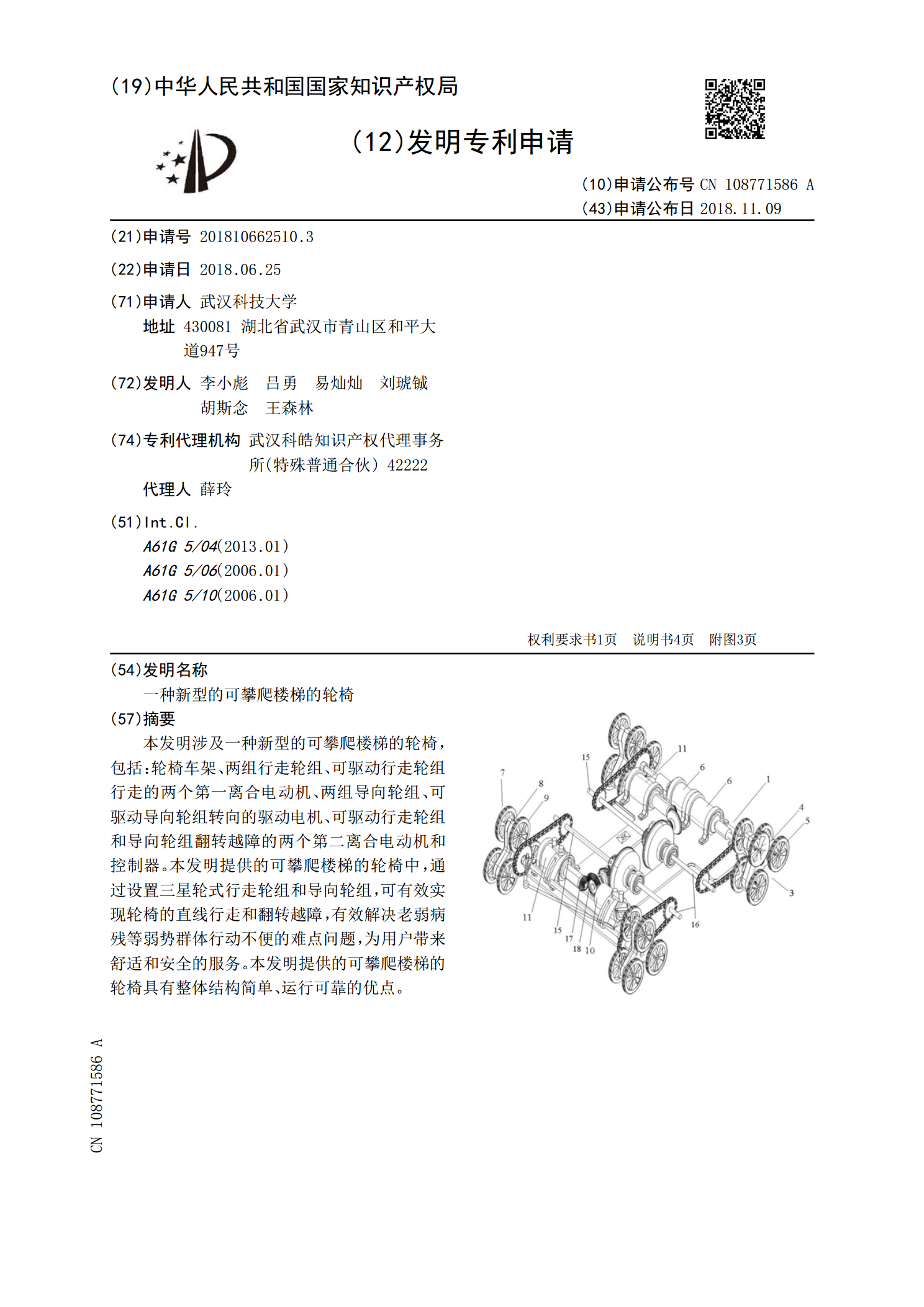
本发明涉及一种新型的可攀爬楼梯的轮椅,包括:轮椅车架、两组行走轮组、可驱动行走轮组行走的两个第一离合电动机、两组导向轮组、可驱动导向轮组转向的驱动电机、可驱动行走轮组和导向轮组翻转越障的两个第二离合电动机和控制器。本发明提供的可攀爬楼梯的轮椅中,通过设置三星轮式行走轮组和导向轮组,可有效实现轮椅的直线行走和翻转越障,有效解决老弱病残等弱势群体行动不便的难点问题,为用户带来舒适和安全的服务。本发明提供的可攀爬楼梯的轮椅具有整体结构简单、运行可靠的优点。