
追踪车辆路径的系统和方法.pdf

英瑞****写意


1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

追踪车辆路径的系统和方法.pdf
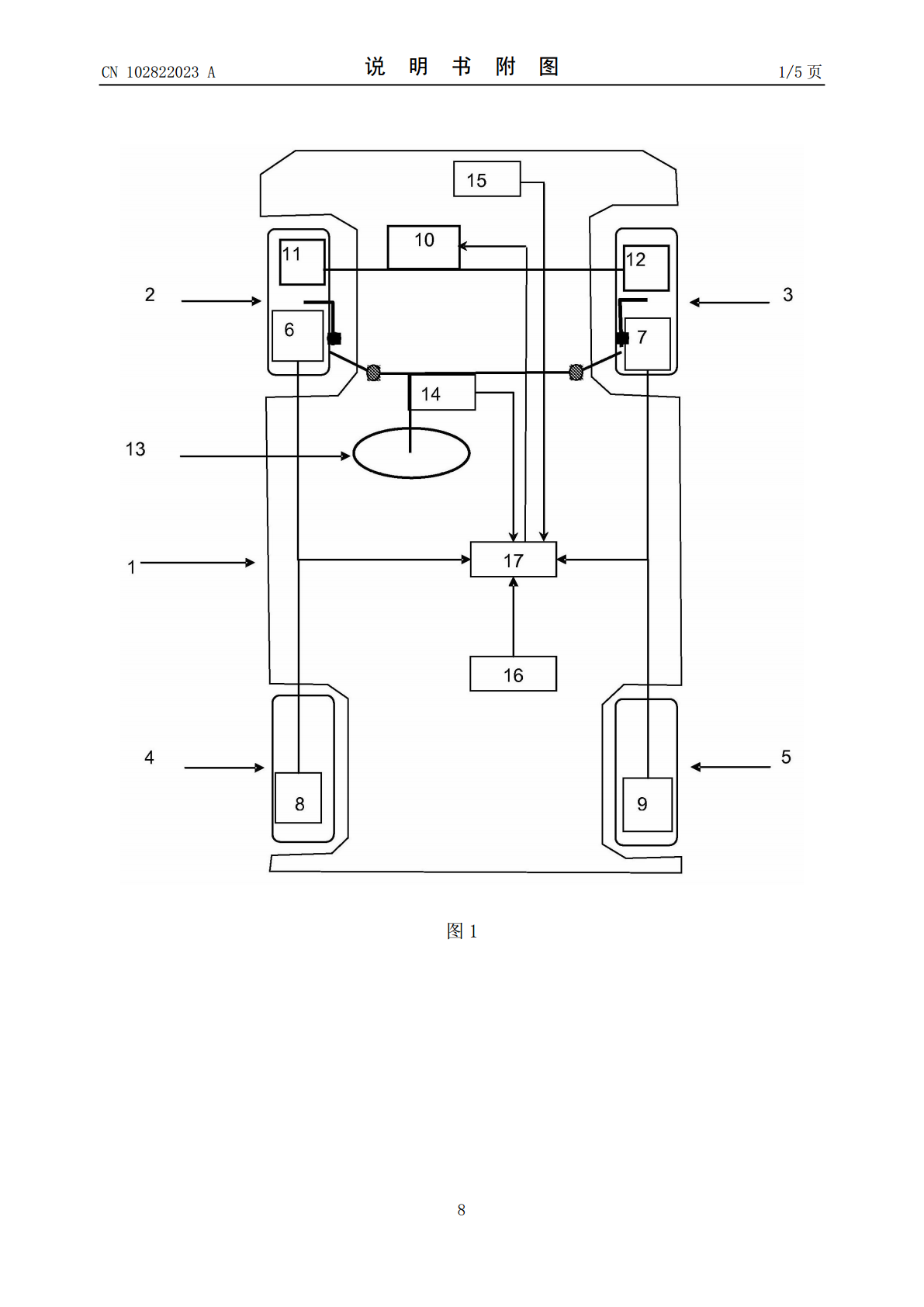
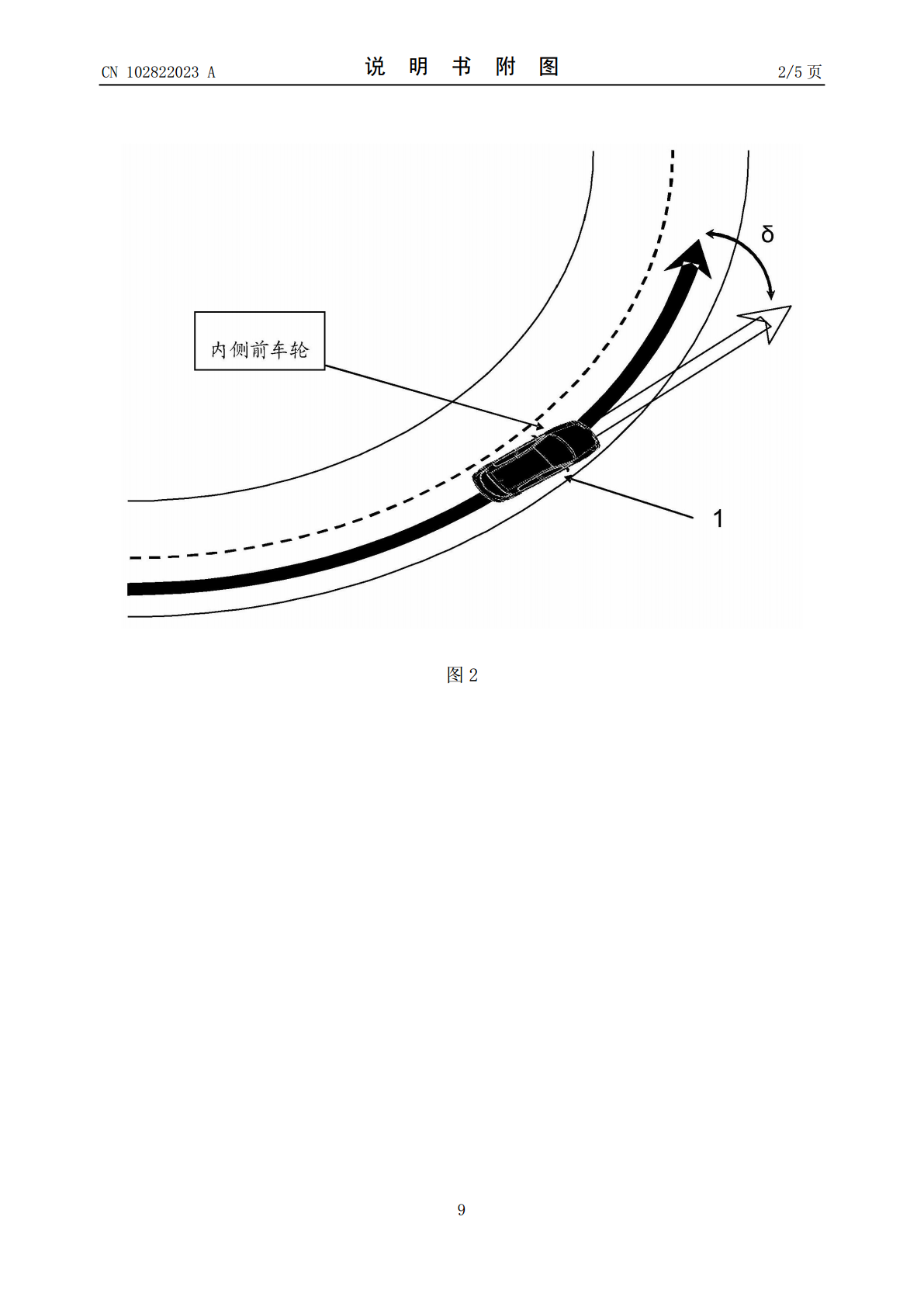
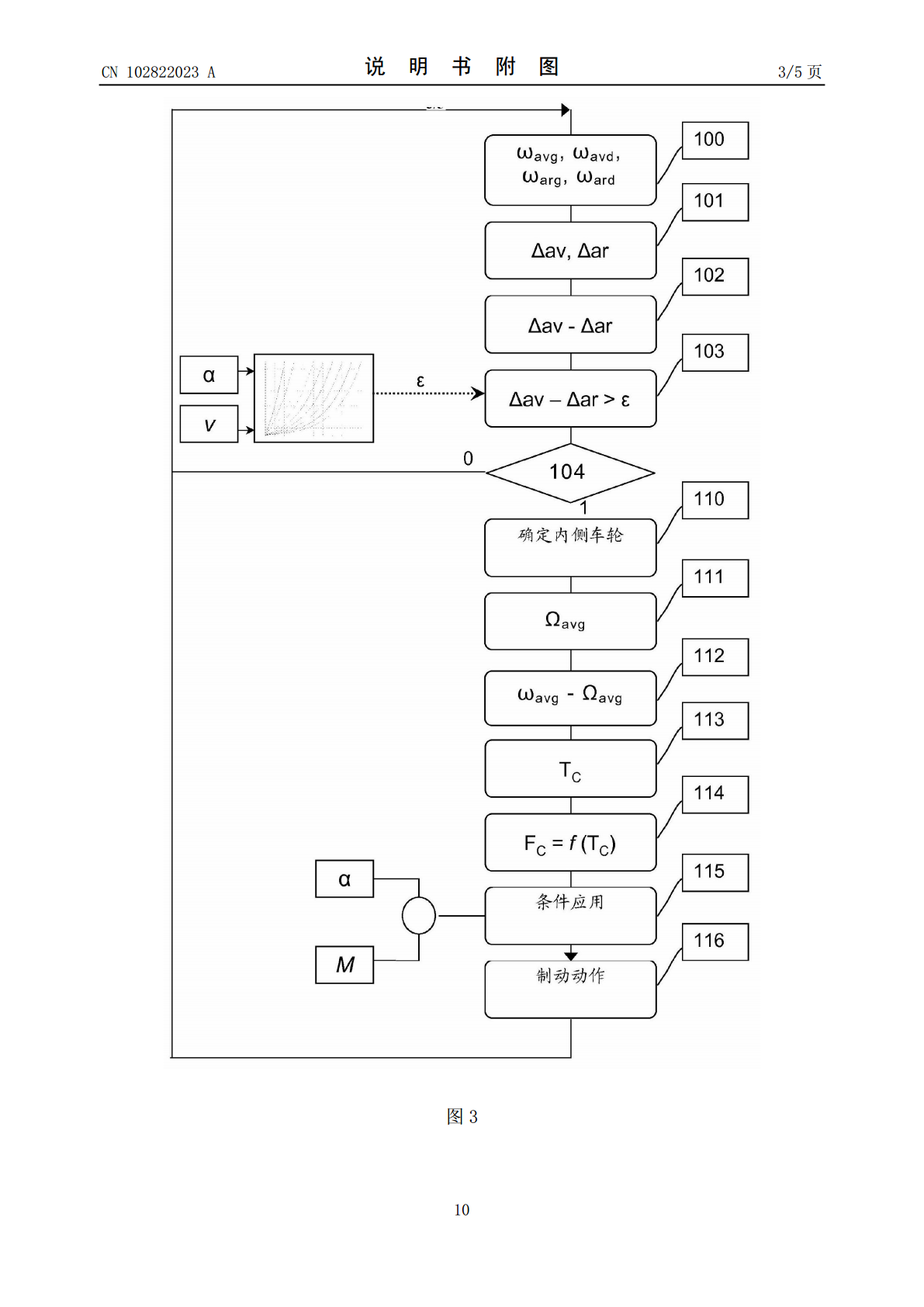
本发明涉及一种用于追踪机动车辆(1)的轨迹的系统,所述系统包括在前车桥系统和后车桥系统的每个车轮(6,9)上的一个瞬时速度传感器。根据本发明,该系统包括用于计算单个车桥系统(Aav和Aar)的多个车轮之间的速度损失的装置(200和201)、用于计算每个车桥系统的速度损失之间的差异的装置(202)、以及用于将所述差异与一个储存的阈值(ε)进行比较的装置(203)。本发明还涉及一种用于追踪机动车辆的轨迹的方法,所述方法包括以下多个步骤:计算这些前车桥系统和后车桥系统(Aav和Aar)的车轮的速度损失、计算每个

一种车辆追踪方法、系统和车辆.pdf
本申请实施例提供一种车辆追踪方法、系统和车辆,该方法包括:获取安装在追踪车辆上的激光雷达传感器采集的目标点云数据;从所述目标点云数据中确定目标车辆并获取所述目标车辆的状态信息;基于所述目标点云数据和所述目标车辆的状态信息,预测所述目标车辆的至少一条行驶路径;根据所述目标点云数据、所述目标车辆的状态信息和所述至少一条行驶路径,控制所述追踪车辆追踪所述目标车辆。该方法利用激光雷达传感器采集的目标点云数据来对被追捕车辆的路径进行预测,可以实现对被追捕车辆的实时跟踪,可以大大降低目标跟丢的概率,提高抓捕成功率等。
基于MPC的车辆自适应路径追踪方法.pdf
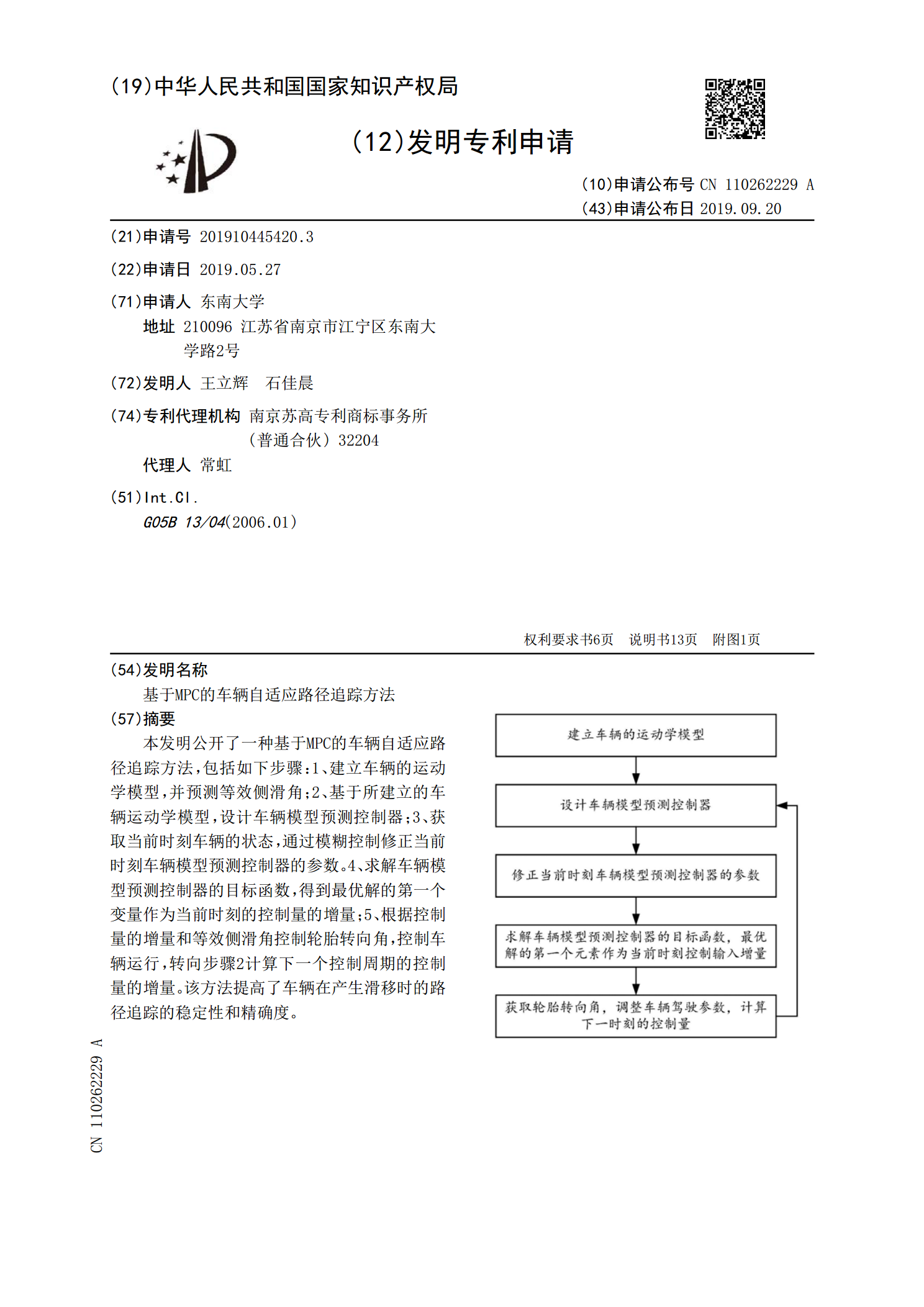
本发明公开了一种基于MPC的车辆自适应路径追踪方法,包括如下步骤:1、建立车辆的运动学模型,并预测等效侧滑角;2、基于所建立的车辆运动学模型,设计车辆模型预测控制器;3、获取当前时刻车辆的状态,通过模糊控制修正当前时刻车辆模型预测控制器的参数。4、求解车辆模型预测控制器的目标函数,得到最优解的第一个变量作为当前时刻的控制量的增量;5、根据控制量的增量和等效侧滑角控制轮胎转向角,控制车辆运行,转向步骤2计算下一个控制周期的控制量的增量。该方法提高了车辆在产生滑移时的路径追踪的稳定性和精确度。

电磁波传播路径的追踪方法、装置和系统.pdf
本发明实施例提供一种电磁波传播路径的追踪方法、装置和系统,该方法包括:根据预先设定的有效平面选择半径确定发信点的有效平面;对于所述发信点发出的每一条射线,沿所述射线的方向检测所述射线与所述有效平面之间的交点;如果所述射线与所述有效平面之间存在交点,并且所述射线经过有效交点的路径累积反射当量不大于预先设定的最大反射当量,则确定所述射线的下一路径方向,直到所述射线到达接收点的接收区域或者所述射线经过有效交点的路径累积反射当量大于预先设定的最大反射当量。通过本发明实施例,降低了路径追踪过程中计算过程的复杂度,实
路径跟踪控制方法、装置、系统和车辆.pdf
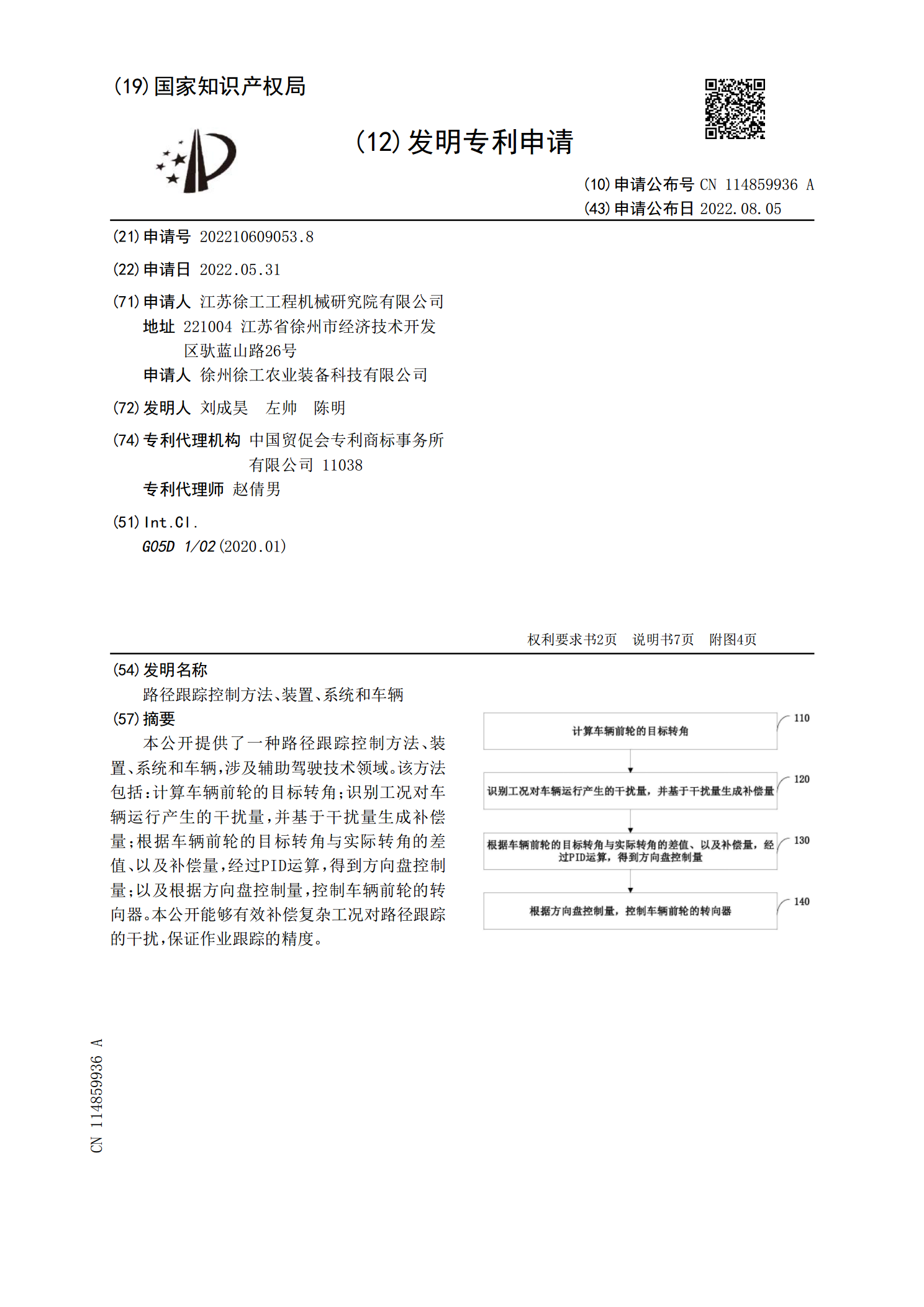
本公开提供了一种路径跟踪控制方法、装置、系统和车辆,涉及辅助驾驶技术领域。该方法包括:计算车辆前轮的目标转角;识别工况对车辆运行产生的干扰量,并基于干扰量生成补偿量;根据车辆前轮的目标转角与实际转角的差值、以及补偿量,经过PID运算,得到方向盘控制量;以及根据方向盘控制量,控制车辆前轮的转向器。本公开能够有效补偿复杂工况对路径跟踪的干扰,保证作业跟踪的精度。