
基于MPC的车辆自适应路径追踪方法.pdf

是来****文章


1/10

2/10

3/10

4/10
5/10
6/10
7/10

8/10

9/10
10/10
亲,该文档总共21页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于MPC的车辆自适应路径追踪方法.pdf
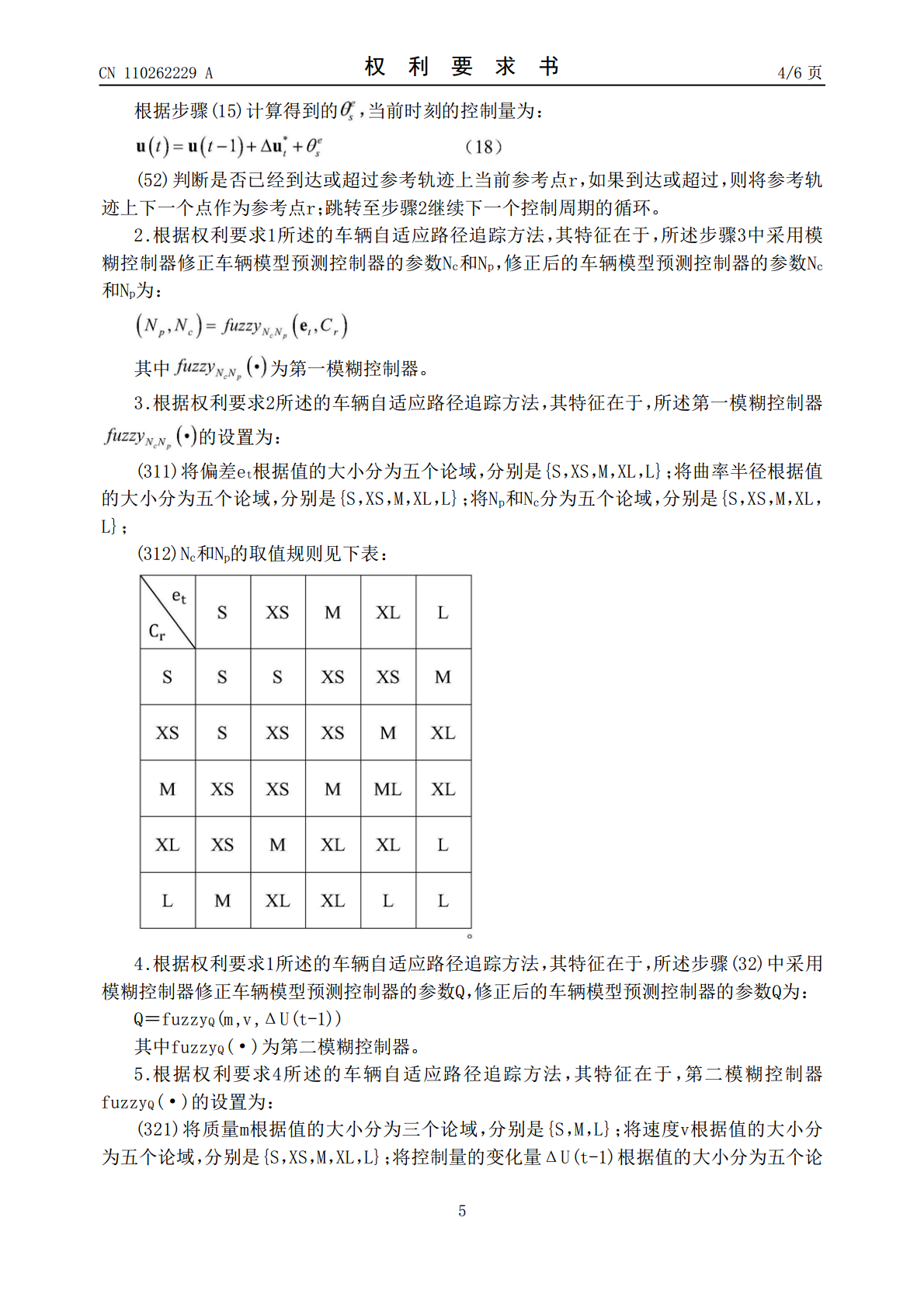
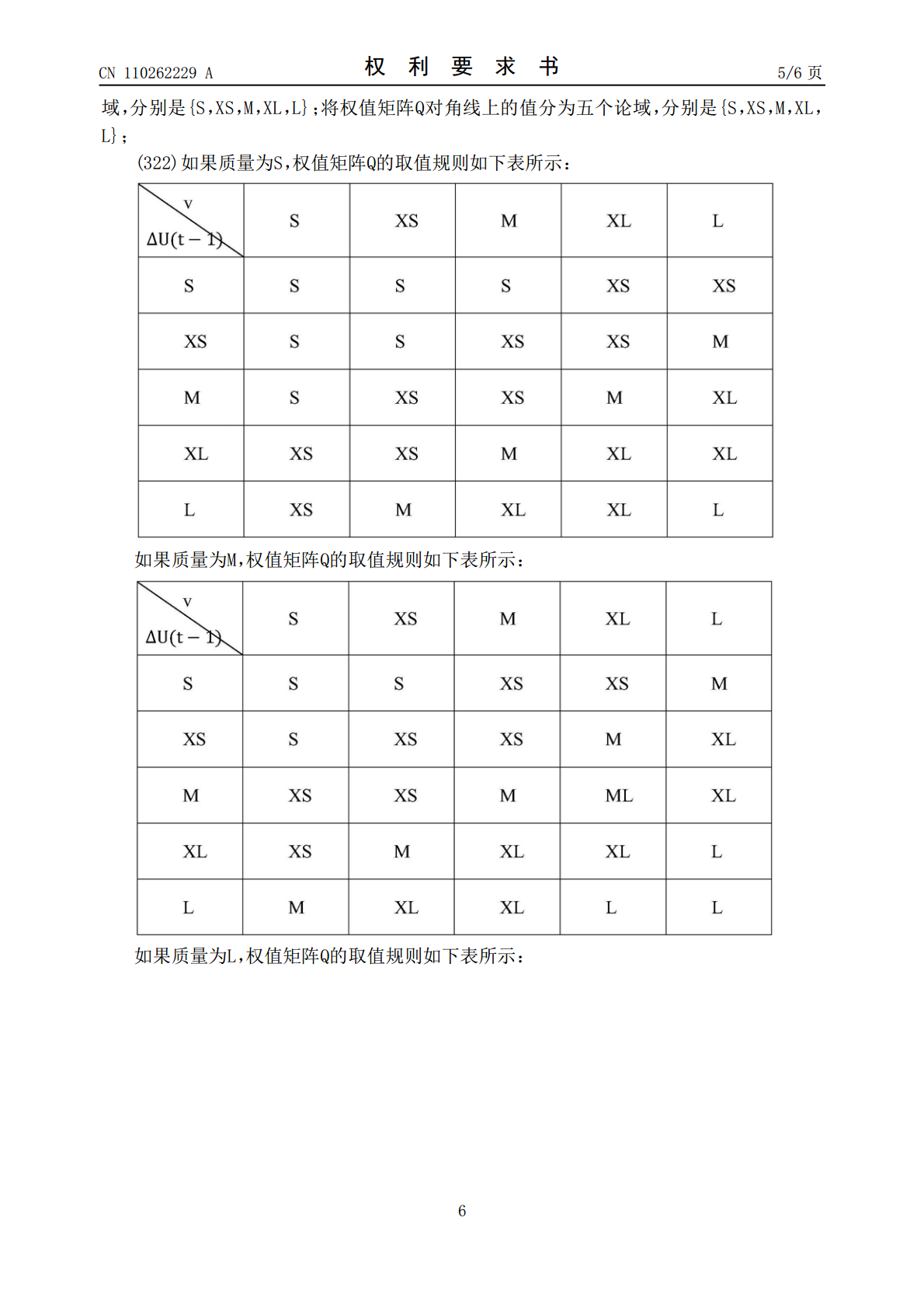
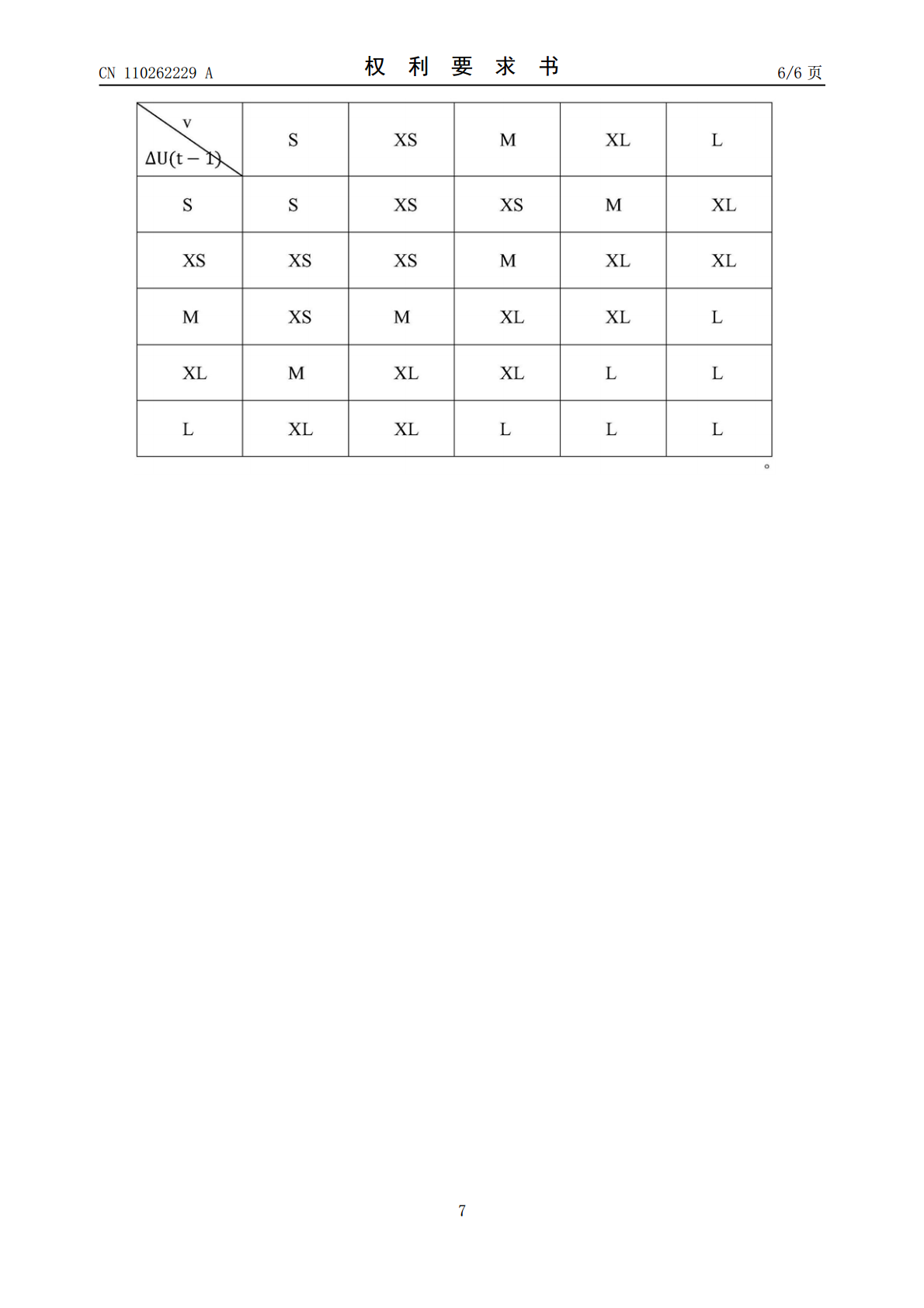
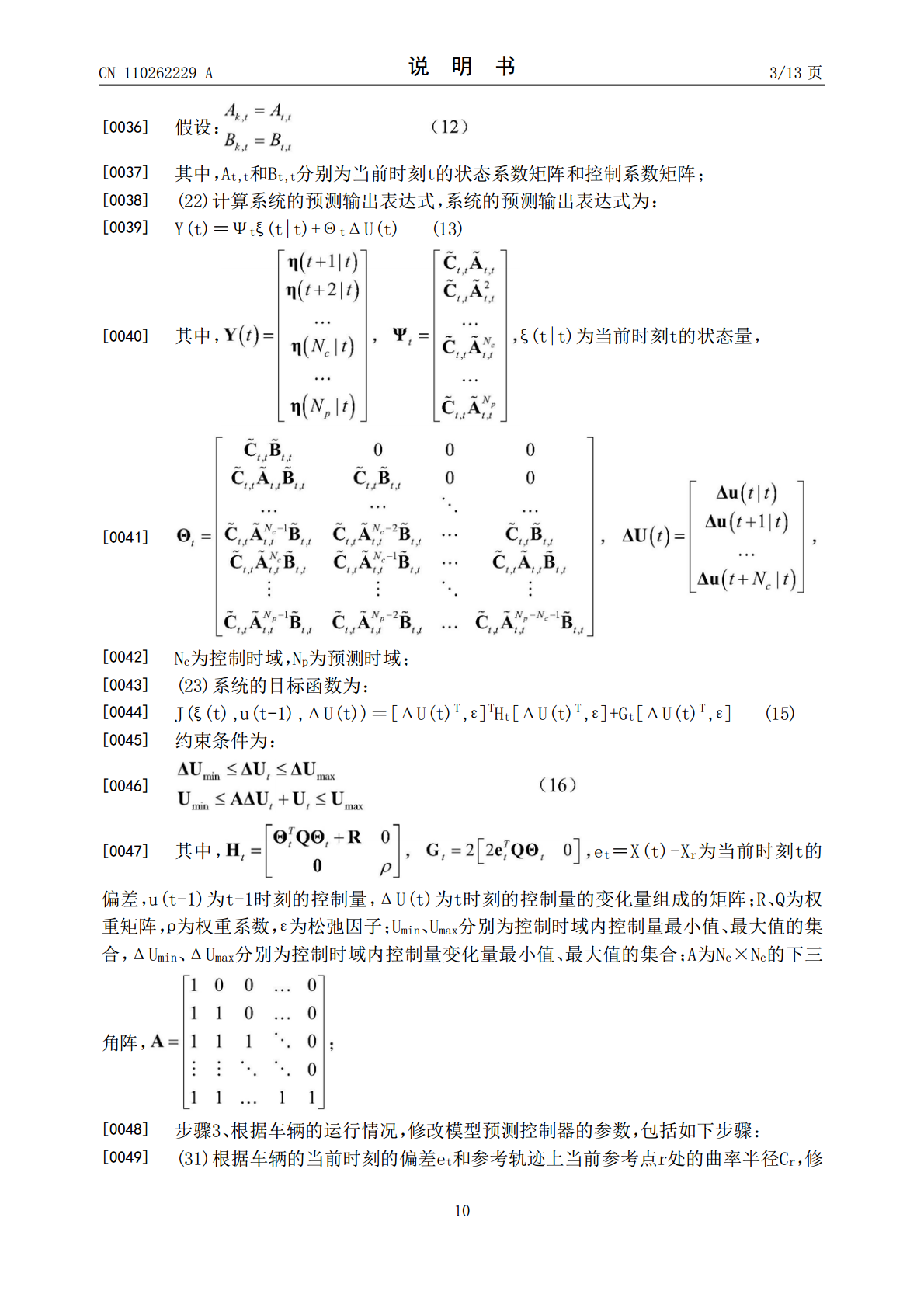
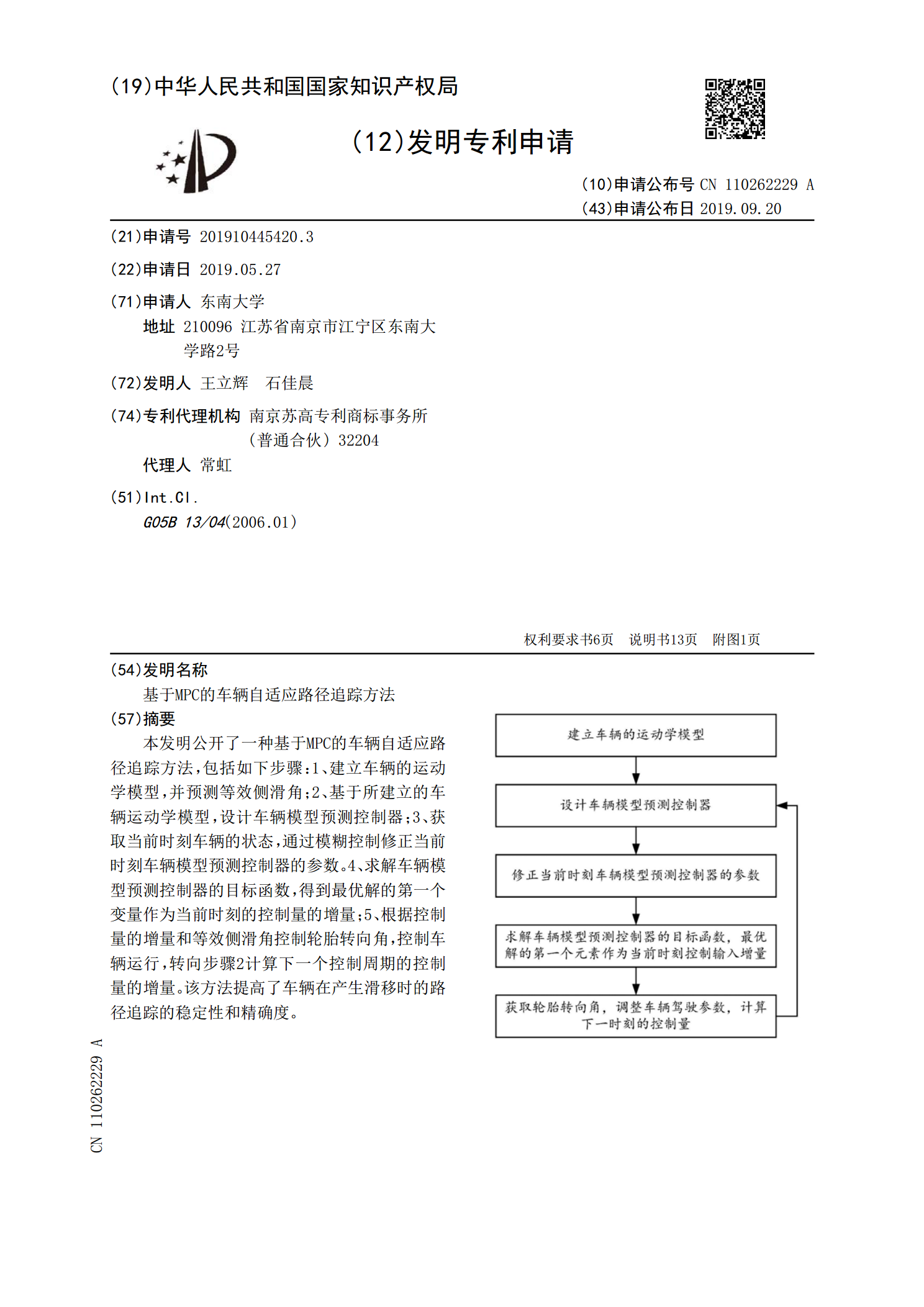
本发明公开了一种基于MPC的车辆自适应路径追踪方法,包括如下步骤:1、建立车辆的运动学模型,并预测等效侧滑角;2、基于所建立的车辆运动学模型,设计车辆模型预测控制器;3、获取当前时刻车辆的状态,通过模糊控制修正当前时刻车辆模型预测控制器的参数。4、求解车辆模型预测控制器的目标函数,得到最优解的第一个变量作为当前时刻的控制量的增量;5、根据控制量的增量和等效侧滑角控制轮胎转向角,控制车辆运行,转向步骤2计算下一个控制周期的控制量的增量。该方法提高了车辆在产生滑移时的路径追踪的稳定性和精确度。

基于MPC和模糊控制的智能汽车路径追踪研究.pptx
汇报人:目录PARTONEPARTTWO智能汽车发展现状路径追踪技术的重要性MPC和模糊控制理论概述PARTTHREEMPC算法原理MPC算法在路径追踪中的应用MPC算法优化策略PARTFOUR模糊控制原理模糊控制器设计模糊控制规则制定PARTFIVE系统总体架构处理器:高性能处理器,如Inteli7或AMDRyzen7内存:至少8GBRAM,推荐16GB或更高存储设备:SSD硬盘,至少256GB,推荐512GB或更高显示器:高分辨率显示器,如1080p或2K输入设备:键盘、鼠标、触摸板等网络设备:千兆以

追踪车辆路径的系统和方法.pdf
本发明涉及一种用于追踪机动车辆(1)的轨迹的系统,所述系统包括在前车桥系统和后车桥系统的每个车轮(6,9)上的一个瞬时速度传感器。根据本发明,该系统包括用于计算单个车桥系统(Aav和Aar)的多个车轮之间的速度损失的装置(200和201)、用于计算每个车桥系统的速度损失之间的差异的装置(202)、以及用于将所述差异与一个储存的阈值(ε)进行比较的装置(203)。本发明还涉及一种用于追踪机动车辆的轨迹的方法,所述方法包括以下多个步骤:计算这些前车桥系统和后车桥系统(Aav和Aar)的车轮的速度损失、计算每个

基于自适应MPC的无人驾驶车辆轨迹跟踪控制.docx
基于自适应MPC的无人驾驶车辆轨迹跟踪控制随着无人驾驶技术的不断发展,人们对于车辆轨迹跟踪控制的需求也越来越高。然而,传统的控制方法在应对实际道路环境时存在一定的局限性。因此,如何实现准确快速的车辆轨迹跟踪控制成为了研究人员关注的重点。本文针对该问题,提出了一种基于自适应MPC的无人驾驶车辆轨迹跟踪控制方案。首先,本文介绍了自适应MPC控制器的基本原理。自适应MPC控制器是一种模型预测控制(MPC)的变种,它通过在线更新控制模型和调整控制器参数,实现了对于系统动态性能的动态调节。这种控制方法不仅准确性高,

基于模糊自适应纯追踪模型的农业机械路径跟踪方法.docx
基于模糊自适应纯追踪模型的农业机械路径跟踪方法基于模糊自适应纯追踪模型的农业机械路径跟踪方法摘要:农业机械路径跟踪是一项重要的技术,用于提高农业机械在农田中的自主性和精确性。本文提出了一种基于模糊自适应纯追踪模型的农业机械路径跟踪方法。首先,通过传感器获取环境信息,包括农田轮廓和特定地标。然后,根据这些信息生成路径生成器,利用模糊逻辑对路径进行优化和调整。最后,将路径输入到控制器中,实现农业机械的路径跟踪。关键词:农业机械、路径跟踪、模糊自适应纯追踪模型、路径生成器、控制器引言:随着农业机械的发展和智能化