
角度信号控制的恒速转舵伺服装置及其控制方法.pdf

海昌****姐淑


1/8

2/8

3/8

4/8

5/8

6/8

7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
角度信号控制的恒速转舵伺服装置及其控制方法.pdf
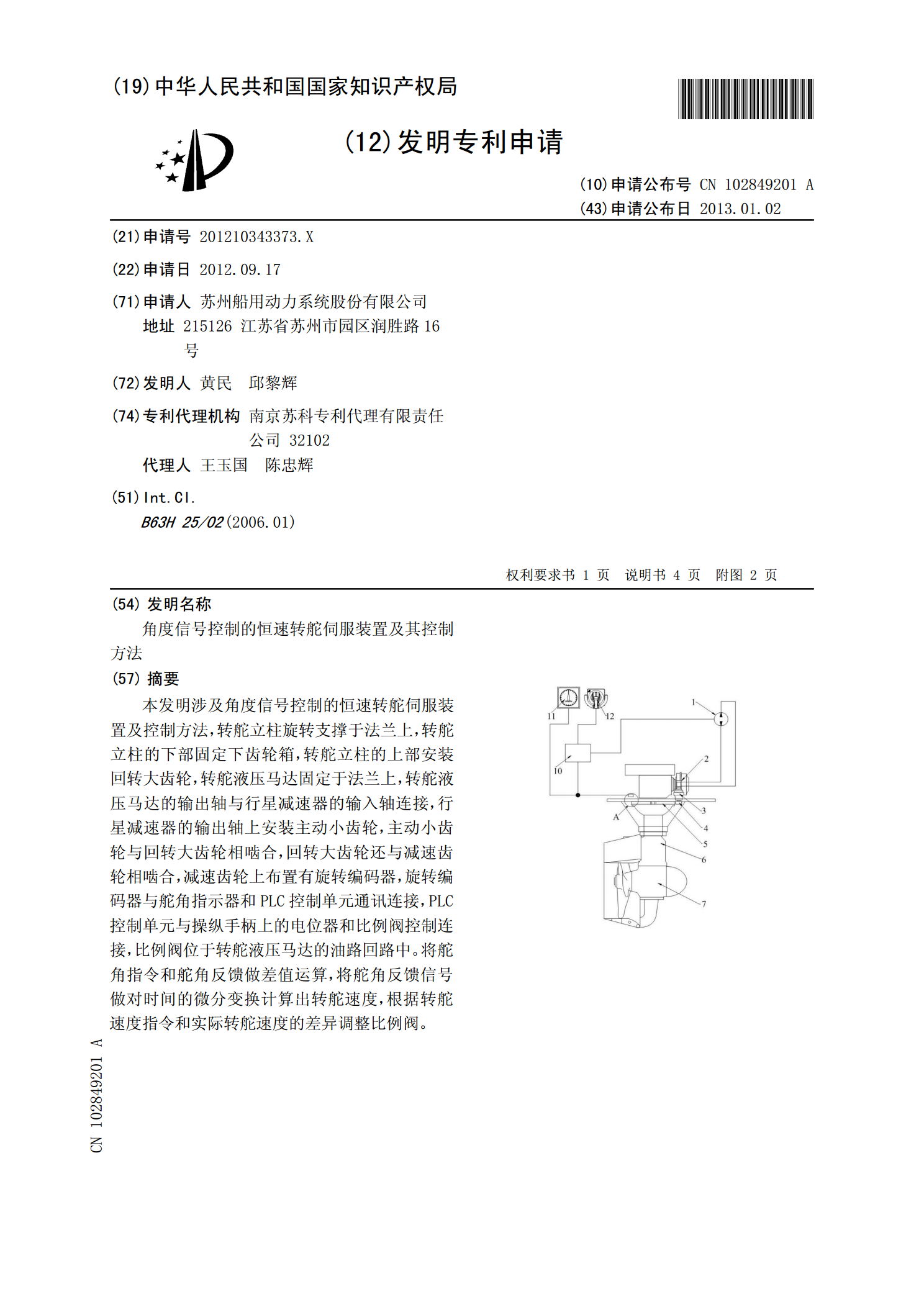
本发明涉及角度信号控制的恒速转舵伺服装置及控制方法,转舵立柱旋转支撑于法兰上,转舵立柱的下部固定下齿轮箱,转舵立柱的上部安装回转大齿轮,转舵液压马达固定于法兰上,转舵液压马达的输出轴与行星减速器的输入轴连接,行星减速器的输出轴上安装主动小齿轮,主动小齿轮与回转大齿轮相啮合,回转大齿轮还与减速齿轮相啮合,减速齿轮上布置有旋转编码器,旋转编码器与舵角指示器和PLC控制单元通讯连接,PLC控制单元与操纵手柄上的电位器和比例阀控制连接,比例阀位于转舵液压马达的油路回路中。将舵角指令和舵角反馈做差值运算,将舵角反馈

恒速转舵伺服装置及其控制方法.pdf
本发明涉及恒速转舵伺服装置及控制方法,转舵立柱旋转支撑于法兰上,转舵立柱的下部固定下齿轮箱,转舵立柱的上部安装回转大齿轮,转舵液压马达固定于法兰上,转舵液压马达的输出轴与行星减速器的输入轴驱动连接,行星减速器的输出轴上安装主动小齿轮,主动小齿轮与回转大齿轮相啮合,回转大齿轮还与减速齿轮相啮合,减速齿轮上布置有反馈器,反馈器与舵角指示器和PLC控制单元通讯连接,PLC控制单元与操纵手柄和比例阀控制连接,比例阀位于转舵液压马达的油路回路中。将舵角指令和舵角反馈做差值运算,将舵角反馈信号做对时间的微分变换计算出

转舵控制装置、方法及转舵系统.pdf
本发明实施例中公开了一种转舵控制装置、方法及转舵系统。其中,转舵控制装置包括:处理单元,能够根据指示一吊舱推进器的目标转舵角度的转舵信号生成一第一驱动信号和一第二驱动信号;和传输单元,用于将第一驱动信号输出给一主电机驱动系统,将第二驱动信号输出给一从电机驱动系统;第一驱动信号用于控制主电机驱动系统向与之齿啮合的回转齿圈施加向第一方向旋转的第一驱动力,第二驱动信号用于控制从电机驱动系统向与之齿啮合的回转齿圈施加向与第一方向相反的第二方向旋转的第二驱动力。本发明实施例中的技术方案能够提高电机驱动系统和回转支承
全回转舵桨装置的液压系统及其控制方法.pdf
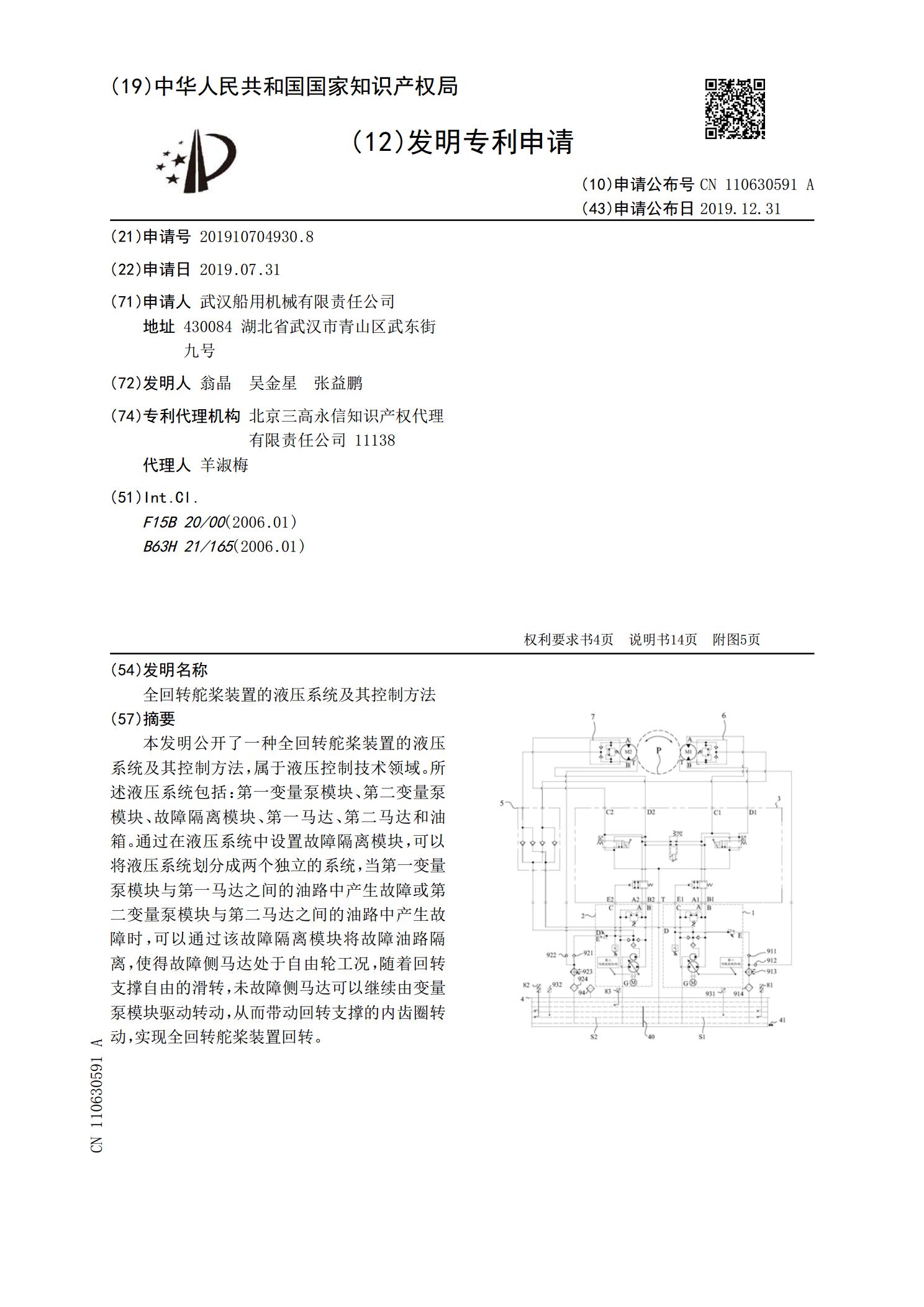
本发明公开了一种全回转舵桨装置的液压系统及其控制方法,属于液压控制技术领域。所述液压系统包括:第一变量泵模块、第二变量泵模块、故障隔离模块、第一马达、第二马达和油箱。通过在液压系统中设置故障隔离模块,可以将液压系统划分成两个独立的系统,当第一变量泵模块与第一马达之间的油路中产生故障或第二变量泵模块与第二马达之间的油路中产生故障时,可以通过该故障隔离模块将故障油路隔离,使得故障侧马达处于自由轮工况,随着回转支撑自由的滑转,未故障侧马达可以继续由变量泵模块驱动转动,从而带动回转支撑的内齿圈转动,实现全回转舵桨
恒速翼展型风力发电机及其控制装置.pdf
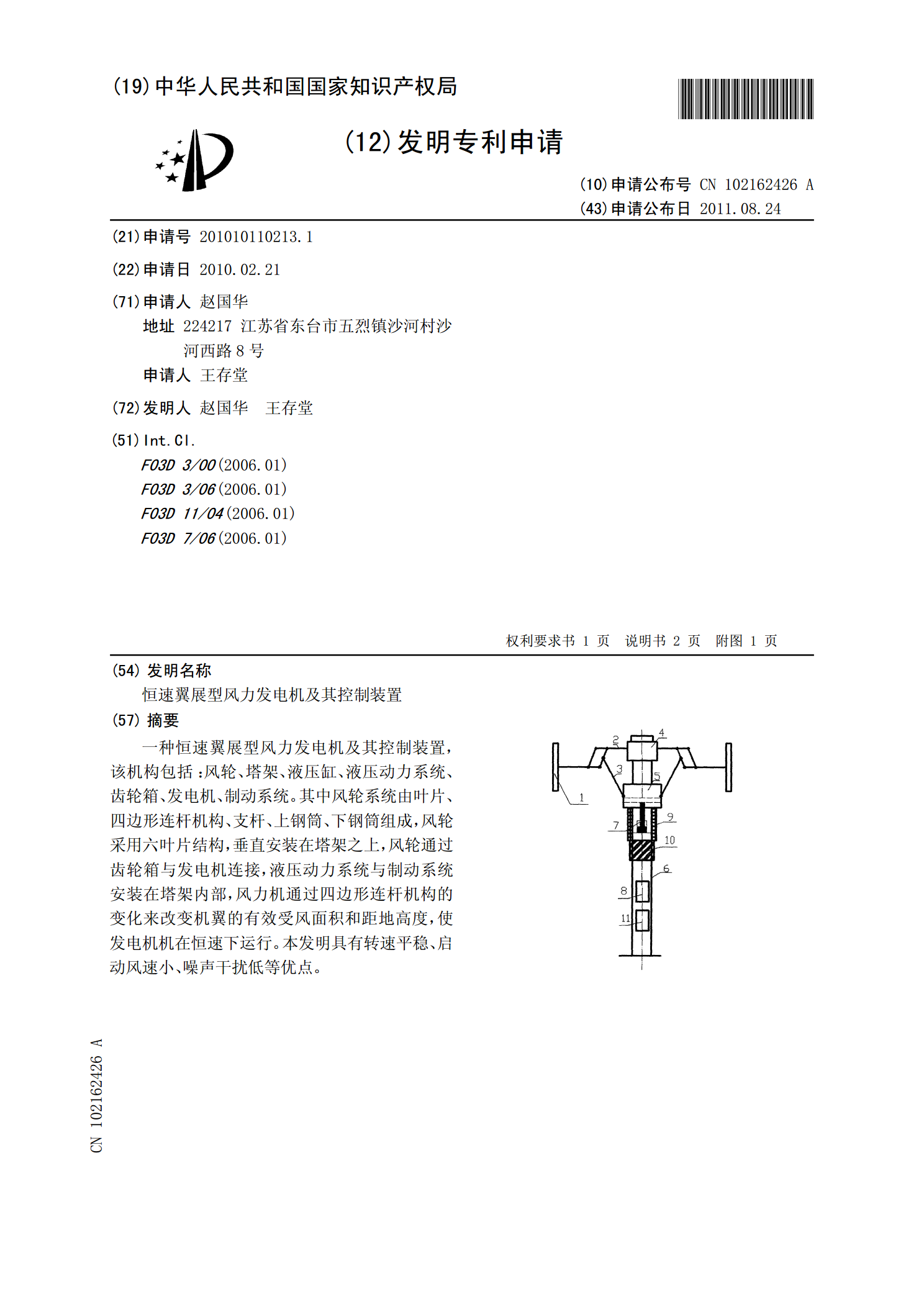
一种恒速翼展型风力发电机及其控制装置,该机构包括:风轮、塔架、液压缸、液压动力系统、齿轮箱、发电机、制动系统。其中风轮系统由叶片、四边形连杆机构、支杆、上钢筒、下钢筒组成,风轮采用六叶片结构,垂直安装在塔架之上,风轮通过齿轮箱与发电机连接,液压动力系统与制动系统安装在塔架内部,风力机通过四边形连杆机构的变化来改变机翼的有效受风面积和距地高度,使发电机机在恒速下运行。本发明具有转速平稳、启动风速小、噪声干扰低等优点。