
转舵控制装置、方法及转舵系统.pdf

美丽****ka


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

转舵控制装置、方法及转舵系统.pdf
本发明实施例中公开了一种转舵控制装置、方法及转舵系统。其中,转舵控制装置包括:处理单元,能够根据指示一吊舱推进器的目标转舵角度的转舵信号生成一第一驱动信号和一第二驱动信号;和传输单元,用于将第一驱动信号输出给一主电机驱动系统,将第二驱动信号输出给一从电机驱动系统;第一驱动信号用于控制主电机驱动系统向与之齿啮合的回转齿圈施加向第一方向旋转的第一驱动力,第二驱动信号用于控制从电机驱动系统向与之齿啮合的回转齿圈施加向与第一方向相反的第二方向旋转的第二驱动力。本发明实施例中的技术方案能够提高电机驱动系统和回转支承
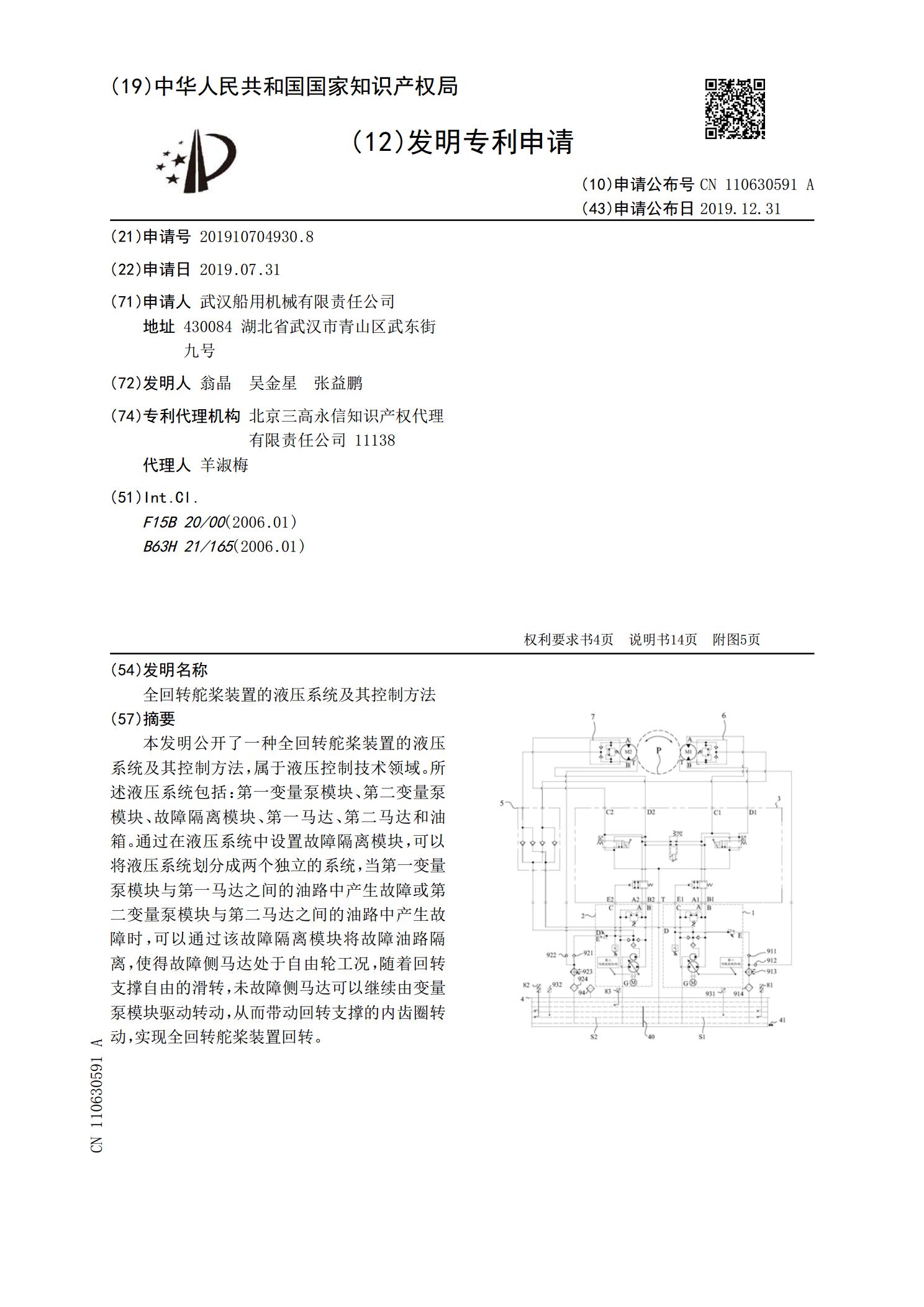
全回转舵桨装置的液压系统及其控制方法.pdf
本发明公开了一种全回转舵桨装置的液压系统及其控制方法,属于液压控制技术领域。所述液压系统包括:第一变量泵模块、第二变量泵模块、故障隔离模块、第一马达、第二马达和油箱。通过在液压系统中设置故障隔离模块,可以将液压系统划分成两个独立的系统,当第一变量泵模块与第一马达之间的油路中产生故障或第二变量泵模块与第二马达之间的油路中产生故障时,可以通过该故障隔离模块将故障油路隔离,使得故障侧马达处于自由轮工况,随着回转支撑自由的滑转,未故障侧马达可以继续由变量泵模块驱动转动,从而带动回转支撑的内齿圈转动,实现全回转舵桨
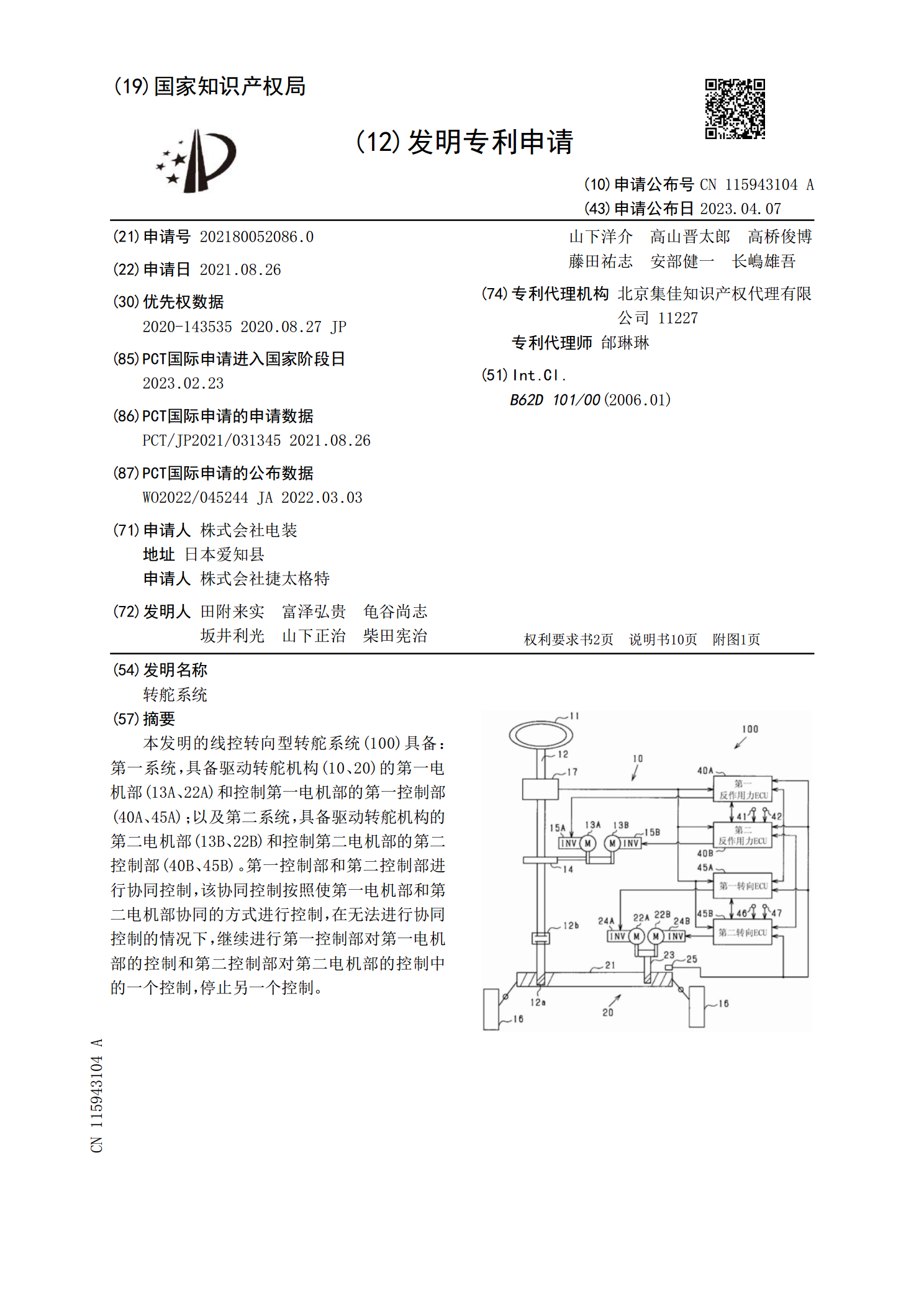
转舵系统.pdf
本发明的线控转向型转舵系统(100)具备:第一系统,具备驱动转舵机构(10、20)的第一电机部(13A、22A)和控制第一电机部的第一控制部(40A、45A);以及第二系统,具备驱动转舵机构的第二电机部(13B、22B)和控制第二电机部的第二控制部(40B、45B)。第一控制部和第二控制部进行协同控制,该协同控制按照使第一电机部和第二电机部协同的方式进行控制,在无法进行协同控制的情况下,继续进行第一控制部对第一电机部的控制和第二控制部对第二电机部的控制中的一个控制,停止另一个控制。

转舵,再转舵.docx
转舵,再转舵生命就像一片汹涌的汪洋,而我们便是在这汪洋中的一叶扁舟,不畏艰险,自由不羁,奋力前行!——题记出港·自由幼鸟已振动它尚且稚嫩的翅膀尝试飞翔;鱼儿游动它美丽的鳍,去追寻大海的宽广;现在的我们,也将要脱离温暖的避风港,去追逐自己的梦想。“扬帆,起航!”一声令下,每个人都驾着自己的帆船,起锚,杨帆,出港。朝阳给予我们荣耀,海鸥为我们送行。大海幽蓝深邃,天空一碧如洗,尽远处的海天相接成一条细线,仿佛演绎着无尽的美好。脱离港口的我们体味到了自由,有的迸发出最大的速度向远处航行,而有的.则过于留恋两旁的风

恒速转舵伺服装置及其控制方法.pdf
本发明涉及恒速转舵伺服装置及控制方法,转舵立柱旋转支撑于法兰上,转舵立柱的下部固定下齿轮箱,转舵立柱的上部安装回转大齿轮,转舵液压马达固定于法兰上,转舵液压马达的输出轴与行星减速器的输入轴驱动连接,行星减速器的输出轴上安装主动小齿轮,主动小齿轮与回转大齿轮相啮合,回转大齿轮还与减速齿轮相啮合,减速齿轮上布置有反馈器,反馈器与舵角指示器和PLC控制单元通讯连接,PLC控制单元与操纵手柄和比例阀控制连接,比例阀位于转舵液压马达的油路回路中。将舵角指令和舵角反馈做差值运算,将舵角反馈信号做对时间的微分变换计算出