
爬楼轮椅.pdf

是你****平呀


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

爬楼轮椅.pdf
本发明涉及一种爬楼轮椅,包括轮椅底架、座椅、行星轮、万向轮、动力源和控制系统,座椅设在轮椅底架上,行星轮包括行星轮架及设置在行星轮架上的行星轮小轮,行星轮为两个,通过行星轮主轴设置在轮椅底架的前方,万向轮为两个,设置在轮椅底架的后方,动力源设置在座椅下方,控制系统的位置适合使用者方便操作,控制系统可以控制行星轮在不同的时间产生在地面行进和上下楼梯的动作。本发明爬楼轮椅稳定性好、安全性高,省时省力,方便各类行动不便人群使用。

爬楼轮椅.pdf
本发明的目的在于提出一种平稳爬楼,兼行平地的爬楼轮椅,它由座椅、升降装置和行走部分构成,行走部分承载座椅,座椅在升降装置作用下保持水平。行走部分由行星轮机构和差速驱动系统组成,差速驱动系统结合行星轮机构实现爬楼轮椅的四种工作状态:平地行进、平地转弯、上下楼梯以及楼梯和平地之间的轮形转换。本发明爬楼轮椅配有两套驱动机构,电机通过直齿圆锥齿轮驱动中心轴,经中心轴上的离合器作用驱动行星架,通过离合器和制动器的分动与联动,即中心轴与行星架的差速与同速实现叶轮的伸缩与保持。本发明爬楼轮椅普遍适应现有楼梯,运动平稳连
爬楼轮椅.pdf
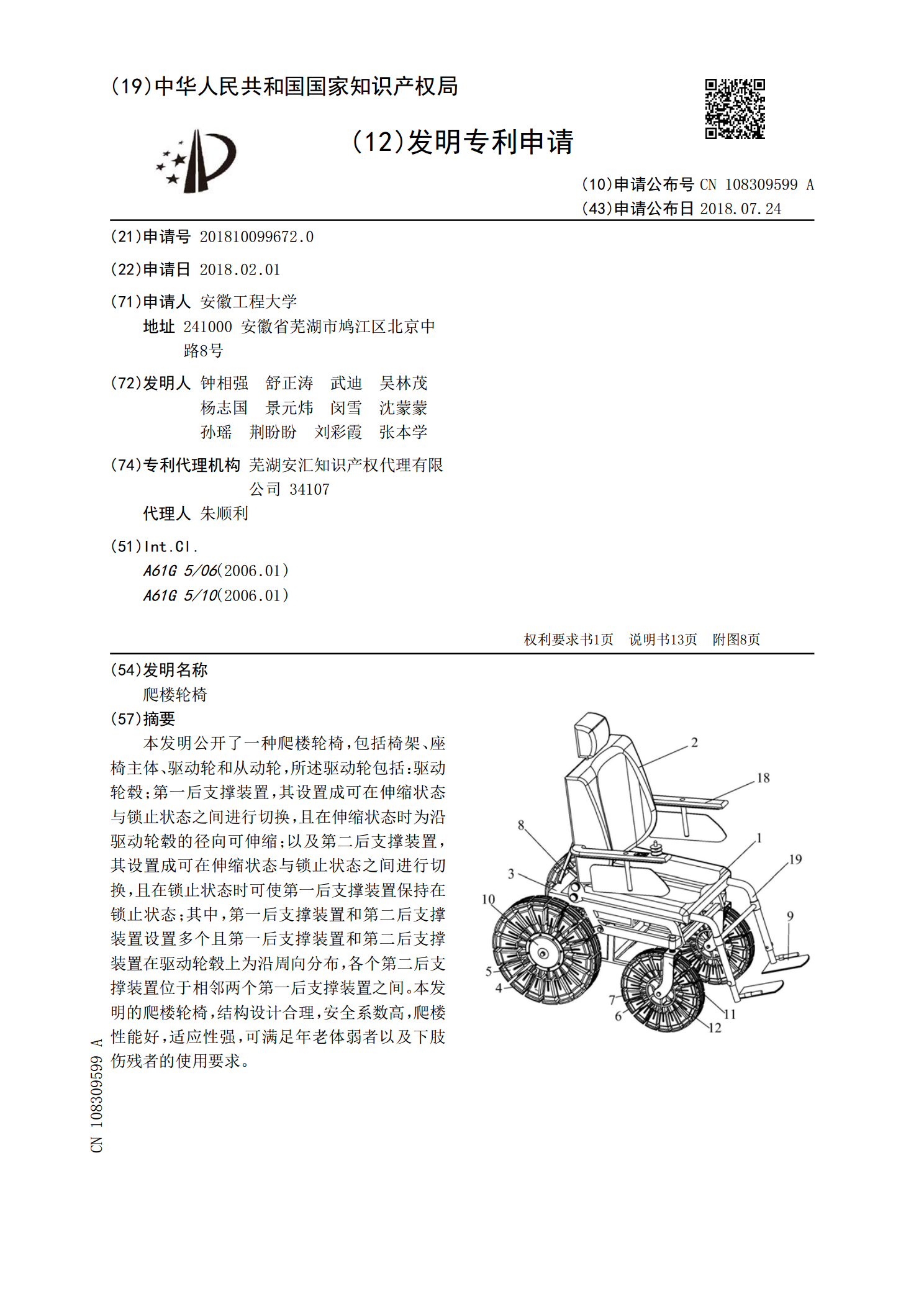
本发明公开了一种爬楼轮椅,包括椅架、座椅主体、驱动轮和从动轮,所述驱动轮包括:驱动轮毂;第一后支撑装置,其设置成可在伸缩状态与锁止状态之间进行切换,且在伸缩状态时为沿驱动轮毂的径向可伸缩;以及第二后支撑装置,其设置成可在伸缩状态与锁止状态之间进行切换,且在锁止状态时可使第一后支撑装置保持在锁止状态;其中,第一后支撑装置和第二后支撑装置设置多个且第一后支撑装置和第二后支撑装置在驱动轮毂上为沿周向分布,各个第二后支撑装置位于相邻两个第一后支撑装置之间。本发明的爬楼轮椅,结构设计合理,安全系数高,爬楼性能好,适

爬楼轮椅设计.docx
摘要本设计首先对轮椅的结构和传动机构进行分析,通过轮椅的主要部件的结构和作用分析,反映出了轮椅在上下楼过程中的运动实现。由原理图分析可以体现和反映出轮椅的内部结构,它主要是由电动机运转带动链轮,使链轮通过链子进行传导,以实现高速轴和低速轴之间的齿轮传动,从而达到轮椅上下楼的安全可靠的完成。在轮椅的设计过程中,主要考虑轮的作用、结构和运动传递进行了分析。在轴的设计过程中,主要论述了材料的选择、载荷分析、结构设计、受力分析、轴承选择、键的选择及对它们的校核等相关内容。关键词:轮椅轮轴AbstractFirst
电动爬楼轮椅.pdf
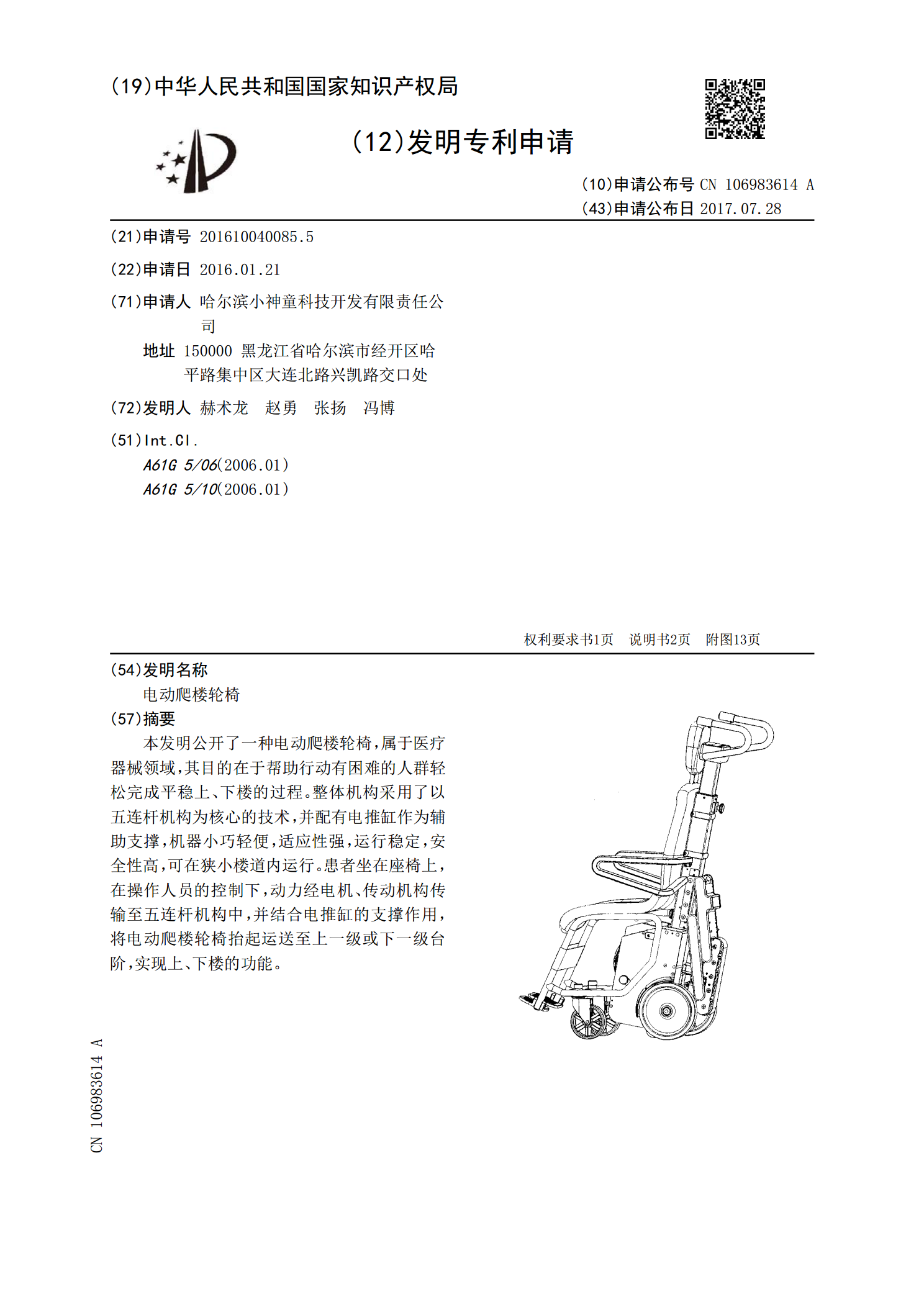
本发明公开了一种电动爬楼轮椅,属于医疗器械领域,其目的在于帮助行动有困难的人群轻松完成平稳上、下楼的过程。整体机构采用了以五连杆机构为核心的技术,并配有电推缸作为辅助支撑,机器小巧轻便,适应性强,运行稳定,安全性高,可在狭小楼道内运行。患者坐在座椅上,在操作人员的控制下,动力经电机、传动机构传输至五连杆机构中,并结合电推缸的支撑作用,将电动爬楼轮椅抬起运送至上一级或下一级台阶,实现上、下楼的功能。